一种杆件间内部连接或边界约束刚度可调的恒力机构的制作方法
本发明涉及恒力控制,特别涉及一种杆件间内部连接或边界约束刚度可调的恒力机构。
背景技术:
1、恒力机构在一定位移范围内能输出几乎恒定的力,对机械夹持、机器人末端执行机构等应用领域非常重要。目前恒力机构的实现方式主要有两种:一种是基于反馈系统的主动恒力系统,第二种是弹簧钢卷成的恒扭弹簧或基于凸轮的恒力机构。主动恒力系统需要复杂的力反馈系统,成本高昂。弹簧钢卷成的恒扭弹簧恒力不可调节。基于凸轮的恒力机构设计及制造复杂,且具有摩擦磨损等问题。
2、经过对现有技术的检索发现,专利号为201610003886.4的中国专利公开了一种可调节恒力机构,采用力的组合实现恒力可调节。组合力包括线性弹簧产生的正刚度弹力与凸轮机构产生的负刚度力,其中线性弹簧的力-位移特性曲线的斜率与凸轮机构的力-位移特性曲线斜率的绝对值相等,两者组合后使得最终输出的力为恒力;当改变线性弹簧的预压长度时,线性弹簧的力-位移特性曲线就会向上下平移,而力-位移特性曲线的斜率不会改变,最终与凸轮机构产生的力组合后输出的恒力就会改变。该装置的凸轮机构加工完成后,需要与指定刚度的线性弹簧匹配使用,因此凸轮轮廓复杂且需要较高的加工精度,且凸轮和两个水平移动组件之间存在摩擦磨损,精度和使用寿命较低。
3、此外,现有恒力机构的恒力输出是通过稳态跳转的方式实现的,机构的位移范围通常与系统本身尺寸相关,即系统的位移范围受限于主体结构的尺寸。目前已有的恒力机构的有效位移范围均不超过系统本身尺寸的10%-15%,系统紧凑性不足(系统位移范围与系统尺寸相比较小)。在位移需求较高的应用中,这些结构的尺寸也要相应增大,相应地增加系统的重量以及成本。对于空间极为有限(比如微机电系统)或者对结构尺寸/重量有较高要求(比如航空航天或机器人的设计)的应用场景来说,这个限制对恒力机构的设计和应用均提出了极大的挑战。
技术实现思路
1、为了解决上述技术问题,本发明中披露了一种杆件间内部连接或边界约束刚度可调的恒力机构,本发明的技术方案是这样实施的:
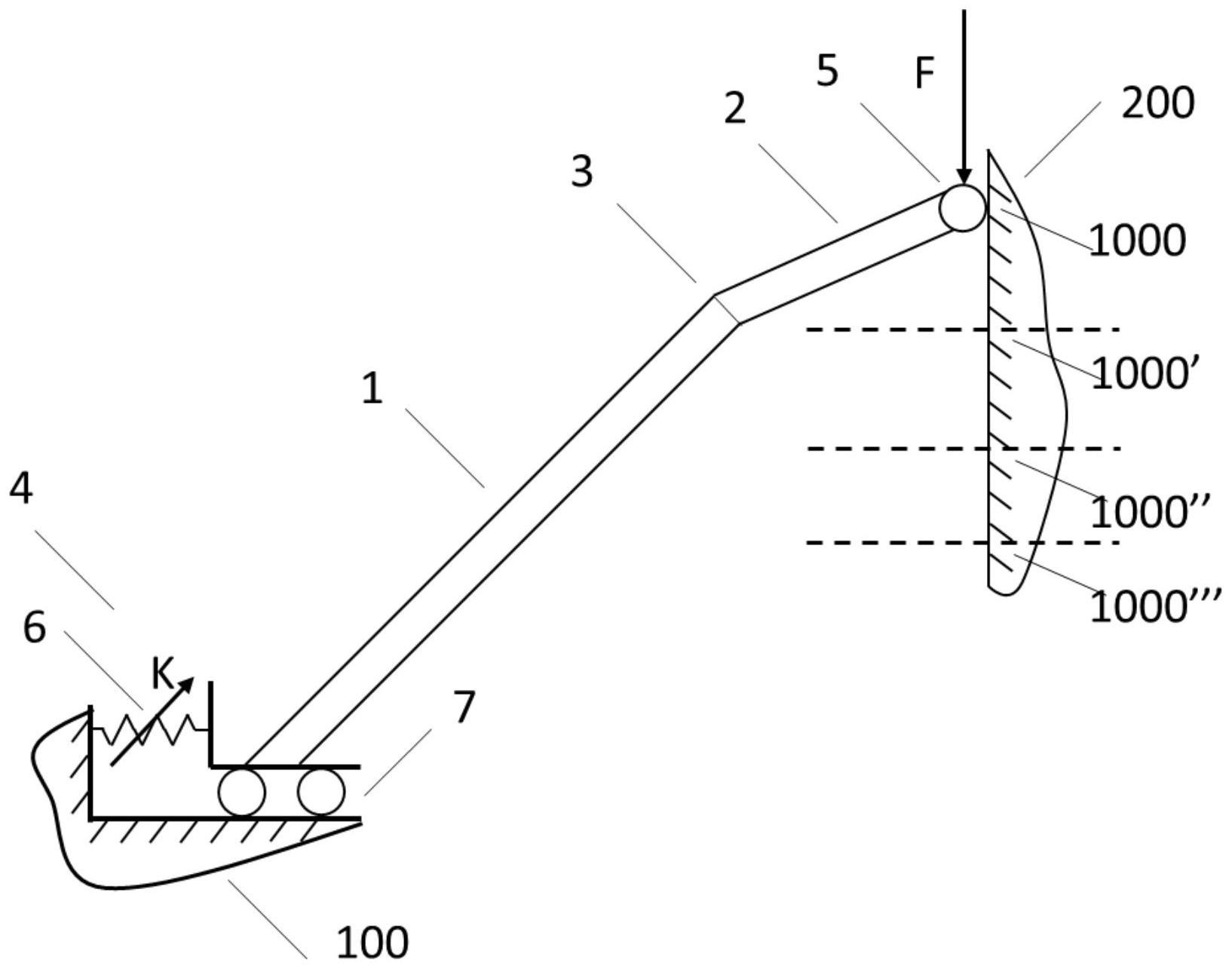
2、一种杆件间内部连接或边界约束刚度可调的恒力机构,包括:第一杆件、第二杆件、第一连接件、第二连接件、第三连接件、第一固定结构和第二固定结构;
3、所述第一杆件与所述第二杆件通过所述第一连接件连接,所述第一杆件与所述第一固定结构通过所述第二连接件连接,所述第二杆件与所述第二固定结构通过所述第三连接件连接;
4、所述第三连接件可沿着所述第二固定结构做竖向运动。
5、优选地,所述第一杆件和所述第二杆件为柔性杆件。
6、优选地,所述第二连接件选自包括一弹簧和第一结构;
7、所述第一结构为滚动滑轮或铰接装置。
8、优选地,所述第三连接件包括第二弹簧。
9、优选地,所述第一连接件包括第三弹簧和第三转动结构;
10、所述第三转动结构为滚动滑轮或铰接装置。
11、优选地,所述第一弹簧或所述第二弹簧的数量为2或者2个以上。
12、优选地,所述第一弹簧或所述第二弹簧为线性弹簧或转动弹簧。
13、本发明的优点如下:
14、通过调节杆件的边界约束刚度及内部连接刚度等参数对机构的刚度进行调节,进而调节机构的输出力。由于机构的刚度对这些参数的改变非常敏感,故机构的刚度变化范围很大,进而机构的输出力变化范围很大。此外,可根据实际需要,设计第二杆件与第二固定结构之间的滑动距离,这个滑动距离理论上可与整个机构在这个方向上的尺寸相当。对第一杆件、第二杆件及设置的线性弹簧/转动弹簧进行合理设计后,可获得恒力机构,对线性弹簧/转动弹簧的刚度进行调节,就可获得一种可调的恒力机构。和现有的可调恒力机构比较起来,采用本发明方法获得的可调恒力机构具有调节简单,恒力调节范围大,有效位移大等优势。
技术特征:
1.一种杆件间内部连接或边界约束刚度可调的恒力机构,其特征在于,包括:第一杆件、第二杆件、第一连接件、第二连接件、第三连接件、第一固定结构和第二固定结构;
2.根据权利要求1所述的一种杆件间内部连接或边界约束刚度可调的恒力机构,其特征在于,所述第一杆件和所述第二杆件为柔性杆件。
3.根据权利要求2所述的一种杆件间内部连接或边界约束刚度可调的恒力机构,其特征在于,所述第二连接件选自包括一弹簧和第一结构;
4.根据权利要求2所述的一种杆件间内部连接或边界约束刚度可调的恒力机构,其特征在于,所述第三连接件包括第二弹簧。
5.根据权利要求2所述的一种杆件间内部连接或边界约束刚度可调的恒力机构,其特征在于,所述第一连接件包括第三弹簧和第三结构;
6.根据权利要求3、4或5所述的一种杆件间内部连接或边界约束刚度可调的恒力机构,其特征在于,所述第一弹簧、所述第二弹簧或所述第三弹簧为线性弹簧或转动弹簧。
7.根据权利要求3、4或5所述的一种杆件间内部连接或边界约束刚度可调的恒力机构,其特征在于,所述第一弹簧、所述第二弹簧或所述第三弹簧的数量为2或者2个以上。
技术总结
本发明提供了一种杆件间内部连接或边界约束刚度可调的恒力机构,包括:第一杆件、第二杆件、第一连接件、第二连接件、第三连接件、第一固定结构和第二固定结构;第一杆件与第二杆件通过第一连接件连接,第一杆件与第一固定结构通过第二连接件连接,第二杆件与第二固定结构通过第三连接件连接;第三连接件可沿着第二固定结构做竖向运动。其中本发明的有益效果是:通过调整受力杆件的边界约束/内部连接刚度来调整整个机构的刚度,进而调节整个机构的输出力,结构简单,减轻/避免摩擦及磨损问题,大幅提高使用寿命,并且大幅提高恒力可调节范围以及有效位移范围,提升系统紧凑性。
技术研发人员:康利平
受保护的技术使用者:上海足适智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!