一种用于动力驱动耙的齿轮箱控制系统及方法与流程
1.本发明涉及齿轮箱技术领域,尤其涉及一种用于动力驱动耙的齿轮箱控制系统及方法。
背景技术:
2.动力驱动耙是指利用拖拉机动力输出轴,通过万向节传动轴和传动系统,驱动工作部件进行旱田碎土整地作业的机具。主要工作部件是一排立轴转子,每个转子装有两个直立耙齿。工作时转子由动力输出轴通过传动系统驱动,一边旋转,一边前进,撞击土块,使耕层土壤松碎。齿轮箱是一种通过改变齿轮转速来实现调整输出轴扭矩的机械装置。它由两个或更多个齿轮组成,其中一个齿轮由电机驱动。齿轮箱可以应用在多种使用场景下,本发明中主要针对的是用于驱动农耕机械作业的齿轮箱。农耕作业过程中,齿轮箱需要驱动动力驱动耙的耙齿和播种机构运行。齿轮箱在长时间的使用过程中,输出轴上的齿轮不可避免的会发生偏移,这种偏移难以被检修人员观察出来,同时该种偏移会导致齿轮箱输出轴上的齿轮与动力驱动耙及播种机构的传动结构之间的连接关系不稳定,从而发生抖动,严重影响对动力驱动耙及播种机构的驱动效率,进而影响农耕作业效率。
技术实现要素:
3.针对现有技术存在的不足,本发明的目的在于提供一种用于动力驱动耙的齿轮箱控制系统及方法,用于自动检测并修正齿轮箱的第一输出轴上蜗轮的偏移,保证驱动效率。
4.为实现上述目的,本发明提供了如下技术方案:一种用于动力驱动耙的齿轮箱控制系统,包括齿轮箱,所述齿轮箱内部设有驱动输入轴、第一输出轴、第二输出轴、径向离合机构、偏移检测组件、偏移复位机构和控制模块;
5.所述驱动输入轴一端贯穿所述齿轮箱并连接一外部驱动机构,另一端可转动地设置在所述齿轮箱内部,所述驱动输入轴上固定套接有第一齿轮;
6.所述第一输出轴与所述驱动输入轴互相平行,所述第一输出轴可转动地设置在所述齿轮箱内部,所述第一输出轴上固定套接有蜗轮和第一锥齿轮,所述蜗轮与所述第一齿轮啮合,所述第一锥齿轮垂直啮合有第二锥齿轮,所述第二锥齿轮固定套接在所述第二输出轴上,所述第二输出轴贯穿所述齿轮箱并连接动力驱动耙;
7.所述径向离合机构内设有蜗杆,所述蜗杆位于所述蜗轮上端,所述蜗杆贯穿所述齿轮箱并连接一播种机构;
8.所述偏移检测组件包括若干电磁传感器和磁场发生装置,若干所述电磁传感器均匀分布在所述蜗轮的一侧面上,所述磁场发生装置用于在所述蜗轮两侧的垂直面产生电磁场,各所述电磁传感器用于在所述电磁场中实时采集所述蜗轮旋转时的偏移信号;
9.所述偏移复位机构包括旋转驱动组件和齿轮压紧组件,所述旋转驱动组件固定在所述第一输出轴上端;
10.所述控制模块设置在所述齿轮箱内部,并电连接所述径向离合机构、若干所述电
磁传感器和所述偏移复位机构,所述控制模块包括预处理单元、偏移分析单元和指令生成单元,所述偏移分析单元分别连接所述预处理单元和所述指令生成单元;
11.所述预处理单元用于对若干所述偏移信号依次进行滤波和信号放大,得到相应的若干偏移放大信号;
12.所述偏移分析单元用于对若干所述偏移放大信号进行综合分析,得到当前时刻所述蜗轮上的偏移点与所述蜗轮轮心之间的偏移距离和偏移角度;
13.所述指令生成单元根据所述偏移距离和所述偏移角度依次生成一离合切换指令、一旋转定位指令和一复位压紧指令;
14.所述径向离合机构根据所述离合切换指令带动所述蜗杆与所述蜗轮分离,所述旋转驱动组件根据所述旋转定位指令带动所述齿轮压紧组件旋转至所述偏移点位置,所述齿轮压紧组件根据所述复位压紧指令与所述蜗轮连接,并朝向所述蜗轮轮心压紧所述偏移点,直至所述偏移点与所述蜗轮轮心重合。
15.进一步地,所述偏移分析单元包括存储子单元、波形比较子单元和波形处理子单元,所述波形比较子单元分别连接所述存储子单元和所述波形处理子单元;
16.所述存储子单元中预先存储有各所述电磁传感器在所述蜗轮在所述第一输出轴上未发生偏移时采集到的标准信号;
17.所述波形比较子单元用于将各所述偏移放大信号的波形与相应所述标准信号的波形进行比对做差,得到相应的差值波形;
18.所述波形处理子单元对各所述差值波形进行分析,得到各所述差值波形的相位和振幅,并将各所述振幅带入预设的第一计算公式中,计算得到所述偏移点与所述蜗轮轮心之间的所述偏移距离,进而将所述偏移距离和各所述相位带入预设的第二计算公式中,得到所述偏移点与所述蜗轮轮心之间的所述偏移角度。
19.进一步地,所述第一计算公式配置为:
[0020][0021][0022]
其中,d用于表示所述偏移距离;
[0023]
n用于表示大于1的正整数;
[0024]
d用于表示各所述电磁传感器与所述蜗轮轮心的间距;
[0025]
l1至ln用于表示第一至第n个所述电磁传感器与所述偏移点的间距;
[0026]
b1至bn用于表示第一至第n个预设的比例系数,各所述比例系数均为常数;
[0027]
a1至ai用于表示第一至第n个振幅;
[0028]
k1至kn用于表示第一至第n个配置系数。
[0029]
进一步地,所述第二计算公式配置为:
[0030][0031]
ti=d*cosai;
[0032]
其中,θ用于表示所述偏移角度;
[0033]
m用于表示大于1的正整数;
[0034]
a1至am用于表示第一至第m个所述电磁传感器与所述偏移点的连线与预设的角度标准线之间的角度;
[0035]
t1至tm用于表示第一至第m个所述电磁传感器的相位系数;
[0036]
p1至pm用于表示第一至第m个所述相位。
[0037]
进一步地,所述径向离合机构包括摆动支架、摆动块、摆杆、驱动气缸和所述蜗杆,所述摆动支架与所述第一输出轴互相垂直,所述摆动支架固定在所述齿轮箱内,所述摆动块可摆动地设置在所述摆动支架内,所述蜗杆一端依次贯穿所述摆动块和所述齿轮箱以连接所述播种机构,另一端可转动地设置在所述摆动块内,所述摆杆垂直固定在所述摆动块的侧端,所述驱动气缸的活塞杆可转动地固定连接所述摆杆,所述驱动气缸远离活塞杆的一端可转动地固定在所述齿轮箱的顶端内壁上。
[0038]
进一步地,所述旋转驱动组件包括安装架、驱动电机、驱动盘、转盘、固定轴、第三锥齿轮,所述齿轮压紧组件包括伸缩固定架、丝杆、第四锥齿轮、滑块和定位气缸;
[0039]
所述安装架固定在所述齿轮箱的内侧壁上,所述驱动电机水平固定在所述安装架上,所述驱动盘固定套接在所述驱动电机的输出轴上,所述转盘可转动地设置在所述安装架上,所述驱动盘与所述转盘之间连接有同步带,所述转盘中心开设有通孔,所述固定轴一端贯穿所述通孔并垂直固定连接所述安装架,另一端上固定套接有所述第三锥齿轮;
[0040]
所述伸缩固定架的侧端与所述转盘的侧端固定连接,所述丝杆一端贯穿所述伸缩固定架并固定连接所述第四锥齿轮的轮心,另一端可转动地设置在所述伸缩固定架内,所述滑块螺接在所述丝杆上,所述滑块滑动连接在所述伸缩固定架内,所述第四锥齿轮与所述第三锥齿轮垂直啮合,所述蜗轮的一侧沿轮心均匀开设有若干定位槽,所述定位气缸的活塞杆朝向各所述定位槽,所述定位气缸远离活塞杆的一端固定连接所述滑块。
[0041]
进一步地,所述预处理单元包括波形过滤子单元和信号放大子单元;
[0042]
所述过滤子单元连接所述信号放大子单元,所述波形过滤子单元用于根据预设的波形过滤算法滤除若干所述偏移信号中的杂波得到若干滤后信号;
[0043]
所述信号放大子单元用于根据预设的放大系数对若干所述滤后信号进行信号放大,得到若干所述偏移放大信号。
[0044]
进一步地,所述齿轮压紧组件还包括柔性轴套,所述柔性轴套固定套接在所述定位气缸的活塞杆上,所述柔性轴套内均匀分布有若干压力传感器,所述压力传感器电连接所述控制模块,并用于实时检测所述定位气缸的活塞杆与所述定位槽之间的压力数据;
[0045]
则所述指令生成单元包括压力计算子单元、压力比较子单元和综合处理子单元,所述压力比较子单元分别连接所述压力计算子单元和所述综合处理子单元,所述压力计算子单元用于根据若干所述压力传感器综合计算得到一压力均值数据,所述压力比较子单元用于将所述压力均值数据与预设的压力阈值进行比较,得到一压力比较结果,所述综合处理子单元用于根据所述压力比较结果对所述复位压紧指令进行调整,以使所述压力均值数据维持在所述压力范围内。
[0046]
一种用于动力驱动耙的齿轮箱控制方法,应用于上述的用于动力驱动耙的齿轮箱控制系统,包括:
[0047]
步骤s1,所述磁场发生装置在所述蜗轮两侧的垂直面产生电磁场,各所述电磁传感器在所述电磁场中实时采集所述蜗轮旋转时的偏移信号;
[0048]
步骤s2,所述偏移分析单元对若干所述偏移信号进行综合分析,得到当前时刻所述蜗轮上偏移点与所述蜗轮轮心之间的偏移距离和偏移角度;
[0049]
步骤s3,所述指令生成单元根据所述偏移距离和所述偏移角度依次生成一离合切换指令、一旋转定位指令和一复位压紧指令;
[0050]
步骤s4,所述径向离合机构根据所述离合切换指令带动所述蜗杆与所述蜗轮分离,所述旋转驱动组件根据所述旋转定位指令带动所述齿轮压紧组件旋转至所述偏移点位置,所述齿轮压紧组件根据所述复位压紧指令与所述蜗轮连接,并朝向所述蜗轮轮心压紧所述偏移点,直至所述偏移点与所述蜗轮轮心重合。
[0051]
本发明的有益效果:
[0052]
本发明通过偏移检测机构中的若干电磁传感器在电磁场中实时采集蜗轮旋转时的偏移信号,并通过偏移分析单元对若干偏移信号进行综合分析,得到当前时刻蜗轮上偏移点与蜗轮轮心之间的偏移距离和偏移角度,根据偏移距离和偏移角度可以确定偏移点的位置,因此实现了对蜗轮上偏移点的自动检测定位;确定偏移点的位置后,本发明还通过径向离合机构带动蜗杆与蜗轮分离,避免偏移调整过程对播种机构传动结构造成影响,并使旋转驱动组件带动齿轮压紧组件旋转至偏移点位置以连接蜗轮,最终齿轮压紧组件朝向所述蜗轮轮心压紧偏移点,直至偏移点与蜗轮轮心重合,实现了对蜗轮上偏移点的自动修正压紧,避免第一输出轴上的蜗轮发生抖动,保证了对动力驱动耙和播种机构驱动的稳定性和效率。
附图说明
[0053]
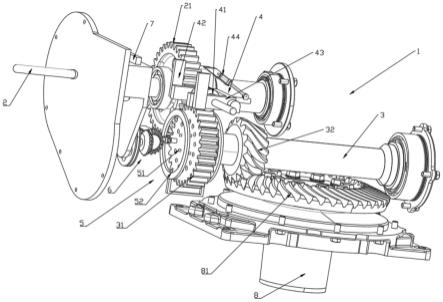
图1是本发明中齿轮箱的内部结构示意图;
[0054]
图2是本发明中齿轮箱的外部结构示意图;
[0055]
图3是本发明中偏移复位机构的结构示意图;
[0056]
图4是本发明中齿轮箱控制系统的控制原理图;
[0057]
图5是本发明中齿轮箱控制步骤流程图。
[0058]
附图标记:1、齿轮箱;2、驱动输入轴;21、第一齿轮;3、第一输出轴;31、蜗轮;32、第一锥齿轮;4、径向离合机构;41、蜗杆;42、摆动支架;43、摆动块;44、驱动气缸;45、摆杆;5、偏移检测组件;51、电磁传感器;52、磁场发生装置;6、偏移复位机构;61、安装架;63、驱动盘;64、转盘;65、固定轴;66、第三锥齿轮;67、伸缩固定架;68、丝杆;69、第四锥齿轮;610、滑块;611、定位气缸;7、控制模块;71、预处理单元;711、波形过滤子单元;712、信号放大子单元;72、偏移分析单元;721、存储子单元;722、波形分析子单元;723、波形处理子单元;73、指令生成单元;731、压力计算子单元;732、压力比较子单元;733、综合处理子单元;8、第二输出轴;81、第二锥齿轮。
具体实施方式
[0059]
下面结合附图和实施例,对本发明进一步详细说明。其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
[0060]
如图1至图3所示,本实施例的一种用于动力驱动耙的齿轮箱控制系统,包括齿轮箱1,齿轮箱1内部设有驱动输入轴2、第一输出轴3、第二输出轴8、径向离合机构4、偏移检测组件5、偏移复位机构6和控制模块7;
[0061]
驱动输入轴2一端贯穿齿轮箱1并连接一外部驱动机构,另一端可转动地设置在齿轮箱1内部,驱动输入轴2上固定套接有第一齿轮21;
[0062]
第一输出轴3与驱动输入轴2互相平行,第一输出轴3可转动地设置在齿轮箱1内部,第一输出轴3上固定套接有蜗轮31和第一锥齿轮32,蜗轮31与第一齿轮21啮合,第一锥齿轮32垂直啮合有第二锥齿轮81,第二锥齿轮81固定套接在第二输出轴8上,第二输出轴8贯穿齿轮箱1并连接动力驱动耙;
[0063]
径向离合机构4内设有蜗杆41,蜗杆41位于蜗轮31上端,蜗杆41贯穿齿轮箱1并连接一播种机构;
[0064]
偏移检测组件5包括若干电磁传感器51和磁场发生装置52,若干电磁传感器51均匀分布在蜗轮31的一侧面上,磁场发生装置52用于在蜗轮31两侧的垂直面产生电磁场,各电磁传感器51用于在电磁场中实时采集蜗轮31旋转时的偏移信号;
[0065]
偏移复位机构6包括旋转驱动组件和齿轮压紧组件,旋转驱动组件固定在第一输出轴3上端;
[0066]
控制模块7设置在齿轮箱1内部,并电连接径向离合机构4、若干电磁传感器51和偏移复位机构6,如图4所示,控制模块7包括预处理单元71、偏移分析单元72和指令生成单元73,偏移分析单元72分别连接预处理单元71和指令生成单元73;
[0067]
预处理单元71用于对若干偏移信号依次进行滤波和信号放大,得到相应的若干偏移放大信号;
[0068]
偏移分析单元72用于对若干偏移放大信号进行综合分析,得到当前时刻蜗轮31上的偏移点与蜗轮31轮心之间的偏移距离和偏移角度;
[0069]
指令生成单元73根据偏移距离和偏移角度依次生成一离合切换指令、一旋转定位指令和一复位压紧指令;
[0070]
径向离合机构4根据离合切换指令带动蜗杆41与蜗轮31分离,旋转驱动组件根据旋转定位指令带动齿轮压紧组件旋转至偏移点位置,齿轮压紧组件根据复位压紧指令与蜗轮31连接,并朝向蜗轮31轮心压紧偏移点,直至偏移点与蜗轮31轮心重合。
[0071]
具体地,本实施例中,外部驱动机构可以为直流电机,直流电机带动驱动输入轴2旋转,进而带动第一齿轮21旋转,第一齿轮21带动蜗轮31旋转,蜗轮31带动第一输出轴3及第一锥齿轮32旋转,第一锥齿轮32带动第二锥齿轮81旋转,第二锥齿轮81带动第二输出轴8旋转,实现对动力驱动耙的驱动;当径向离合机构4中的蜗杆41与蜗轮31啮合时,蜗轮31带动蜗杆41旋转,蜗杆41驱动播种机构运行。
[0072]
在本实施例中,电磁传感器51可以为霍尔元件,霍尔元件的型号可以为ys43f。控制模块7可以为控制电路板,控制电路板上集成设置有单片机芯片,单片机芯片的型号可以为mc35p7040。当齿轮箱1在运行过程中,设置在蜗轮31侧面上的若干霍尔元件实时检测得到若干偏移信号,各偏移信号用以表征蜗轮31侧面上设有霍尔元件处的位置点与蜗轮31轮心之间的发生的偏移。各霍尔元件将若干偏移信号发送至单片机芯片中,首先单片机芯片中的预处理单元71对各偏移信号进行先进行信号预处理,得到若干偏移放大信号。然后单
片机芯片中的偏移分析单元72对各偏移放大信号进行综合分析生成偏移距离和偏移角度,进而单片机芯片中的指令生成单元73根据偏移距离和偏移角度生成依次生成离合切换指令、旋转定位指令和复位压紧指令,并将离合切换指令发送给径向离合机构4,将旋转定位指令发送给旋转驱动组件,以及将复位压紧指令发送给齿轮压紧组件。径向离合机构4根据离合切换指令带动蜗杆41远离蜗轮31,避免偏移调整过程对播种机构传动结构造成影响。旋转驱动组件根据旋转定位指令带动齿轮压紧组件旋转至偏移点位置以连接蜗轮31,最终齿轮压紧组件根据复位压紧指令朝向蜗轮31轮心压紧偏移点,直至偏移点与蜗轮31轮心重合,实现了对蜗轮31上偏移点的自动修正压紧,避免第一输出轴3上的蜗轮31发生抖动,保证了对动力驱动耙和播种机构驱动的稳定性和效率。当偏移角度和偏移距离均为0时表明偏移点与蜗轮31轮心重合,此时对蜗轮31上偏移点的自动修正压紧完毕,指令修正单元此时生成一复位啮合指令并发生至径向离合机构4,径向离合机构4根据复位啮合指令带动蜗杆41与蜗轮31啮合,此时齿轮箱1能够同时驱动播种机构和动力驱动耙。
[0073]
优选的,径向离合机构4包括摆动支架42、摆动块43、摆杆45、驱动气缸44和蜗杆41,摆动支架42与第一输出轴3互相垂直,摆动支架42固定在齿轮箱1内,摆动块43可摆动地设置在摆动支架42内,蜗杆41一端依次贯穿摆动块43和齿轮箱1以连接播种机构,另一端可转动地设置在摆动块43内,摆杆45垂直固定在摆动块43的侧端,驱动气缸44的活塞杆可转动地固定连接摆杆45,驱动气缸44远离活塞杆的一端可转动地固定在齿轮箱1的顶端内壁上。
[0074]
具体地,本实施例中,当驱动气缸44接收到离合切换指令时,驱动气缸44驱动活塞杆收缩,带动摆杆45朝向远离蜗轮31方向摆动,进而带动摆动块43及内部的蜗杆41远离蜗轮31,实现蜗杆41和蜗轮31之间的分离。当驱动气缸44接收到复位啮合指令时,驱动气缸44驱动活塞杆想外推出,带动摆杆45朝向靠近蜗轮31方向摆动,进而带动摆动块43及内部的蜗杆41靠近蜗轮31,直至蜗杆41与蜗轮31啮合。
[0075]
优选的,偏移分析单元72包括存储子单元721、波形比较子单元和波形处理子单元723,波形比较子单元分别连接存储子单元721和波形处理子单元723;
[0076]
存储子单元721中预先存储有各电磁传感器51在蜗轮31在第一输出轴3上未发生偏移时采集到的标准信号;
[0077]
波形比较子单元用于将各偏移放大信号的波形与相应标准信号的波形进行比对做差,得到相应的差值波形;
[0078]
波形处理子单元723对各差值波形进行分析,得到各差值波形的相位和振幅,并将各振幅带入预设的第一计算公式中,计算得到偏移点与蜗轮31轮心之间的偏移距离,进而将偏移距离和各相位带入预设的第二计算公式中,得到偏移点与蜗轮31轮心之间的偏移角度。
[0079]
具体地,本实施例中,波形比对子单元获取得到各偏移放大信号的波形,并将各偏移放大信号的波形与同一电磁传感器51采集到的标准波形做差,得到差值波形,波形处理子单元723对各差值波形进行波形分析,得到各差值波形的相位和振幅,进而将振幅带入第一计算公式中,得到偏移点与蜗轮31轮心之间的偏移距离,进而将相位与计算得到的偏移距离带入第二计算公式中,得到偏移点与蜗轮31轮心之间的偏移角度,根据偏移角度和偏移距离即可确定偏移点在蜗轮31上的位置。
[0080]
优选的,第一计算公式配置为:
[0081][0082][0083]
其中,d用于表示偏移距离;
[0084]
n用于表示大于1的正整数;
[0085]
d用于表示各电磁传感器与蜗轮轮心的间距;
[0086]
l1至ln用于表示第一至第n个电磁传感器与偏移点的间距;
[0087]
b1至bn用于表示第一至第n个预设的比例系数,各比例系数均为常数;
[0088]
a1至ai用于表示第一至第n个振幅;
[0089]
k1至kn用于表示第一至第n个配置系数。
[0090]
具体地,本实施例中,电磁传感器51设置有四个,则配置系数设置有四个,比例系数设置有四个,各配置系数之间互不相同,各比例系数之间互不相同。
[0091]
优选的,第二计算公式配置为:
[0092][0093]
ti=d*cosai;
[0094]
其中,θ用于表示偏移角度;
[0095]
m用于表示大于1的正整数;
[0096]
a1至am用于表示第一至第m个电磁传感器与偏移点的连线与预设的角度标准线之间的角度;
[0097]
t1至tm用于表示第一至第m个电磁传感器的相位系数;
[0098]
p1至pm用于表示第一至第m个相位。
[0099]
优选的,旋转驱动组件包括安装架61、驱动电机(图中未示出)、驱动盘63、转盘64、固定轴65、第三锥齿轮66,齿轮压紧组件包括伸缩固定架67、丝杆68、第四锥齿轮69、滑块610和定位气缸611;
[0100]
安装架61固定在齿轮箱1的内侧壁上,驱动电机水平固定在安装架61上,驱动盘63固定套接在驱动电机的输出轴上,转盘64可转动地设置在安装架61上,驱动盘63与转盘64之间连接有同步带,转盘64中心开设有通孔,固定轴65一端贯穿通孔并垂直固定连接安装架61,另一端上固定套接有第三锥齿轮66;
[0101]
伸缩固定架67的侧端与转盘64的侧端固定连接,丝杆68一端贯穿伸缩固定架67并固定连接第四锥齿轮69的轮心,另一端可转动地设置在伸缩固定架67内,滑块610螺接在丝杆68上,滑块610滑动连接在伸缩固定架67内,第四锥齿轮69与第三锥齿轮66垂直啮合,蜗轮31的一侧沿轮心均匀开设有若干定位槽,定位气缸611的活塞杆朝向各定位槽,定位气缸611远离活塞杆的一端固定连接滑块610。
[0102]
具体地,本实施例中,驱动电机的驱动驱动盘63转动,通过同步带带动转盘64转动,转盘64带动伸缩固定架67旋转,在伸缩固定架67旋转的过程中,第三锥齿轮66固定不动,第四锥齿轮69沿第三锥齿轮66公转的同时保持自转,第四锥齿轮69带动丝杆68旋转,丝杆68带动滑块610朝向第四锥齿轮69方向滑动,此时定位气缸611朝向第四锥齿轮69方向滑
动,当滑动至定位槽位置处时,定位气缸611的活塞杆伸入最靠近定位点的定位槽中,实现齿轮压紧组件与蜗轮31的连接。
[0103]
优选的,预处理单元71包括波形过滤子单元711和信号放大子单元712;
[0104]
过滤子单元连接信号放大子单元712,波形过滤子单元711用于根据预设的波形过滤算法滤除若干偏移信号中的杂波得到若干滤后信号;
[0105]
信号放大子单元712用于根据预设的放大系数对若干滤后信号进行信号放大,得到若干偏移放大信号。
[0106]
具体地,本实施例中,波形过滤子单元711根据限幅消抖滤波法对偏移信号中的杂波进行过滤,实现了消除波形中的抖动,提升了波形稳定性,减少了后续不必要的计算量。信号放大子单元712对滤后信号进行波形放大,便于后续观察计算。
[0107]
优选的,齿轮压紧组件还包括柔性轴套,柔性轴套固定套接在定位气缸611的活塞杆上,柔性轴套内均匀分布有若干压力传感器,压力传感器电连接控制模块7,并用于实时检测定位气缸611的活塞杆与定位槽之间的压力数据;
[0108]
则指令生成单元73包括压力计算子单元731、压力比较子单元732和综合处理子单元733,压力比较子单元732分别连接压力计算子单元731和综合处理子单元733,压力计算子单元731用于根据若干压力传感器综合计算得到一压力均值数据,压力比较子单元732用于将压力均值数据与预设的压力阈值进行比较,得到一压力比较结果,综合处理子单元733用于根据压力比较结果对复位压紧指令进行调整,以使压力均值数据维持在压力范围内。
[0109]
具体地,本实施例中,当定位气缸611的活塞杆对蜗轮31内的定位槽进行偏移压紧时,定位槽会给活塞杆外部的柔性轴套压力,通过若干压力传感器检测到定位气缸611的活塞杆上各处与定位槽之间的压力数据,压力计算子单元731根据若干压力数据计算得到压力均值数据,用以表征定位气缸611的活塞杆对蜗轮31的压紧程度,当压力均值数据不在压力范围内时生成第一压力比较结果,综合处理子单元733根据第一压力比较结果对复位压紧指令进行调整,降低定位气缸611的活塞杆对定位槽的压力,避免压力过大导致定位气缸611的活塞杆变形损坏;当压力均值数据在压力范围内时生成第二压力比较结果,综合处理子单元733根据第二压力比较结果维持复位压紧指令,以保持定位气缸611的活塞杆对定位槽的压力。
[0110]
一种用于动力驱动耙的齿轮箱控制方法,应用于上述的用于动力驱动耙的齿轮箱控制系统,如图5所示,包括:
[0111]
步骤s1,磁场发生装置52在蜗轮31两侧的垂直面产生电磁场,各电磁传感器51在电磁场中实时采集蜗轮31旋转时的偏移信号;
[0112]
步骤s2,偏移分析单元72对若干偏移信号进行综合分析,得到当前时刻蜗轮31上偏移点与蜗轮31轮心之间的偏移距离和偏移角度;
[0113]
步骤s3,指令生成单元73根据偏移距离和偏移角度依次生成一离合切换指令、一旋转定位指令和一复位压紧指令;
[0114]
步骤s4,径向离合机构4根据离合切换指令带动蜗杆41与蜗轮31分离,旋转驱动组件根据旋转定位指令带动齿轮压紧组件旋转至偏移点位置,齿轮压紧组件根据复位压紧指令与蜗轮31连接,并朝向蜗轮31轮心压紧偏移点,直至偏移点与蜗轮31轮心重合。
[0115]
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,
凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1