一种计算机视觉识别装置的制作方法
本发明涉及视觉设备,特别是一种计算机视觉识别装置。
背景技术:
1、计算机视觉识别设备对各种图像数据进行识别处理前,需要其配套的摄像机(摄像头)输入图像数据,比如说经其配套的摄像机采集现场的特定设备图片、为远处接收端基于接收的图像做远程控制提供数据基础。实际情况下,摄像机对准采集视频的特定设备(比如在两个工位之间往复运动的机器人)有些并不是处于全静态工作模式,有可能工作时发生高度上下变化,左右横向移动变化,以及前后位移变化,这样由于计算机视觉识别设备的摄像机机构等不能根据特定设备(比如生产设备)位移调节相应的角度、高度等,摄像机和设备之间的角度、间距等发生变变化后,会造成采集的图片清晰度变差(摄像机使用前和特定设备静态处于最佳视角),对后续计算机处理相应图片造成不利影响。综上所述,提供一种能根据摄像机和检测的特定设备间距及角度变化,对应性对摄像机工位进行调节,尽可能保证摄像机能采集到清晰图片的计算机视觉识别装置显得尤为必要。
技术实现思路
1、为了克服现有计算机图片采集设备因结构所限存在如背景所述弊端,本发明提供了主要应用于对特定物体的图片采集识别,应用中,在相关机构及电路共同作用下,当相应设备左或右、上或下、前或后发生距离及角度变化时,能针对性调节配套摄像机的视角和焦距,尽可能保证相应特定设备处于摄像机的镜头有效范围之内,由此为计算机对图片进行有效处理起到了有利技术支持的一种计算机视觉识别装置。
2、本发明解决其技术问题所采用的方案是:
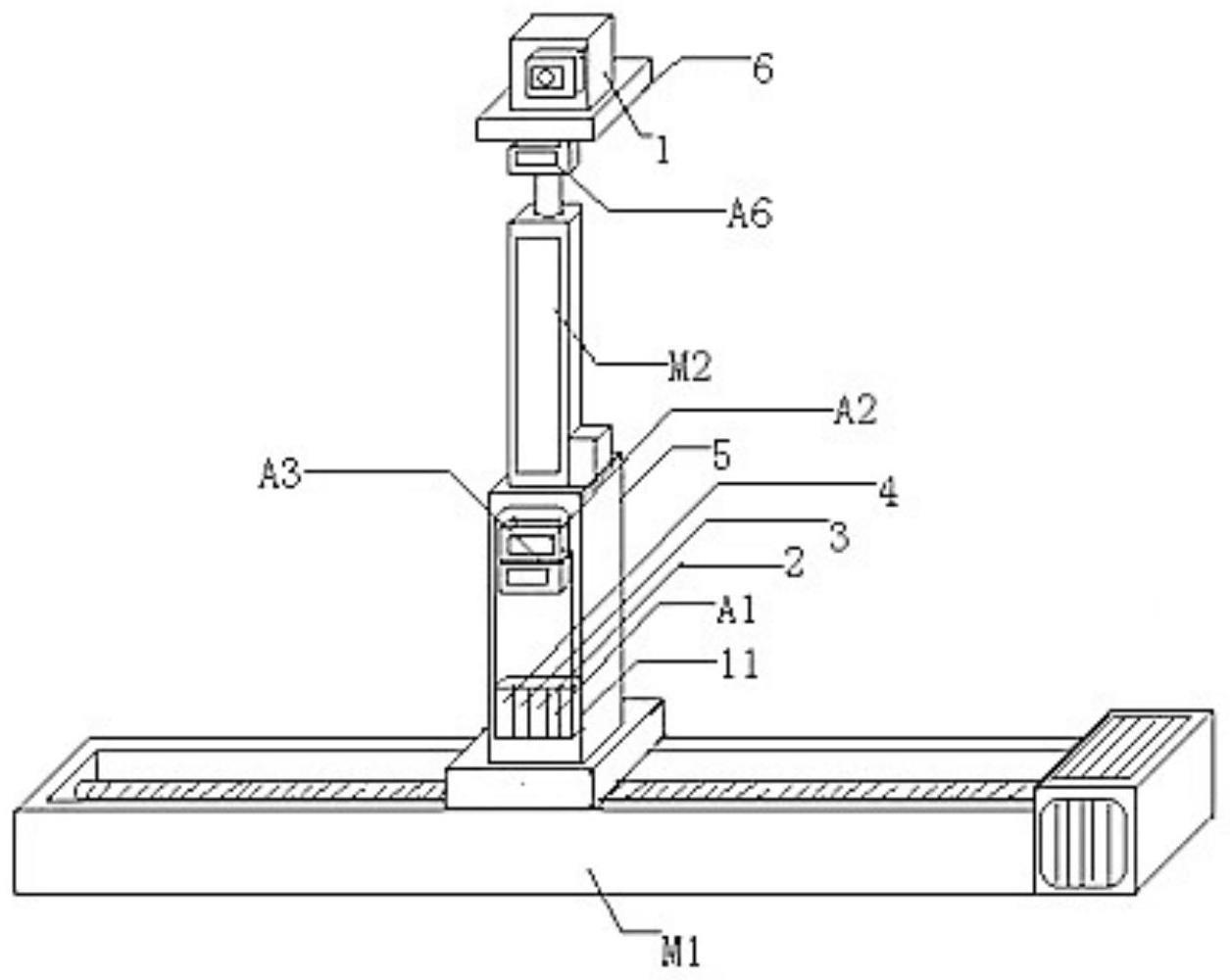
3、一种计算机视觉识别装置,包括计算机视觉识别装置本体、电动直线滑台、激光测距仪、电动伸缩杆、电源模块,其特征在于还具有焦距调节机构、左右探测控制电路、上下探测控制电路、焦距调节控制电路;所述电动推杆下端安装在电动直线滑台的滑动块上端,计算机视觉识别装置本体的摄像机安装在电动推杆的上端,计算机视觉识别装置本体的计算机安装在设备室内;所述激光测距仪有三套,三套激光测距仪分别安装在电动推杆的下端及上端前侧;所述焦距调节机构包括电机减速机构、驱动轮、干簧管,电机减速机构安装在摄像机的壳体前端一侧外,驱动轮安装在电机减速机构的动力输出轴前、且驱动胶轮的侧端和摄像机的焦距调节环侧端紧密接触,壳体前端另一侧安装有支撑杆,干簧管有两只,两只干簧管分别安装在支撑杆前内侧端,焦距调节环上端安装有磁铁;所述电源模块、左右探测控制电路、上下探测控制电路、焦距调节控制电路安装在元件盒内;所述左右探测控制电路的电源输出端和电动直线滑台的电源输入端电性连接,上下探测控制电路的电源输出端和电动推杆的电源输入端电性连接,焦距调节控制电路的电源输出端和电机减速机构的电源输入端电性连接;所述三套激光测距仪的信号输出端和左右探测控制电路、上下探测控制电路、焦距调节控制电路的信号输入端分别电性连接。
4、进一步地,所述干簧管是常闭触点干簧管。
5、进一步地,所述焦距调节控制电路包括电性连接的可调电阻、电阻、npn三极管和继电器,并和两只干簧管电性连接,两只可调电阻一端连接,第一只可调电阻另一端和第一只电阻一端、第二只电阻一端连接,第二只可调电阻另一端和第三只电阻一端、第四只电阻一端连接,第二只电阻另一端、第四只电阻另一端和两只npn三极管发射极、两只继电器负极控制电源输入端连接,两只npn三极管集电极和两只继电器负极电源输入端连接,两只继电器正极电源输入端及正极控制电源输入端连接,第一只电阻另一端、第三只电阻另一端和两只npn三极管基极分别连接,第一只继电器其中一个常开触点端、第二只继电器其中一个常闭触点端和两只干簧管一端分别连接。
6、进一步地,所述左右调节控制电路和上下探测控制电路构造一致,分别包括电性连接的可调电阻、电阻、npn三极管和时控开关、pnp三极管、时间继电器模块,可调电阻一端和第一只电阻一端、第二只电阻一端连接,第二只电阻另一端和npn三极管发射极、两套时控开关的负极电源输入端、时间继电器模块的负极电源输入端及负极触发信号输入端连接,第一只电阻另一端和npn三极管基极连接,npn三极管集电极和pnp三极管基极连接,pnp三极管集电极和时间继电器模块的正极触发信号输入端连接, pnp三极管发射极和时间继电器模块的正极电源输入端连接,时间继电器模块的电源输出端和两套时控开关的正极电源输入端连接。
7、进一步地,所述上下探测调节电路、左右探测调节电路的pnp三极管集电极、npn三极管发射极和一只控制继电器正极及负极两极电源输入端分别电性连接,控制继电器的控制电源输入端及常开触点端分别电性串联在pnp三极管发射极和时间继电器模块的正极电源输入端之间。
8、本发明有益效果是:本发明主要应用于对特定物体(比如某个生产设备)的图片采集,应用中,当生产设备左右发生位移时,在左右探测控制电路、第二套激光测距仪等的作用下,电动直线滑台会带动摄像机左或右运动,保证镜头能有效对准移动的生产设备;当生产设备上下发生位移时,在上下探测控制电路、第三套激光测距仪等的作用下,电动推杆会带动摄像头机上或下运动,保证镜头能有效对准移动的生产设备;当生产设备前后发生位移时,在焦距调节控制电路、第一套激光测距仪等的作用下,电机减速机构会自动调节摄像机的焦距调节环,保证镜头能有效聚焦对准移动的生产设备,获得好的图片采集效果。本发明为计算机本体对图片进行有效处理起到了有利技术支持。基于上述,本发明具有好的应用前景。
技术特征:
1.一种计算机视觉识别装置,包括计算机视觉识别装置本体、电动直线滑台、激光测距仪、电动伸缩杆、电源模块,其特征在于,还具有焦距调节机构、左右探测控制电路、上下探测控制电路、焦距调节控制电路;所述电动推杆下端安装在电动直线滑台的滑动块上端,计算机视觉识别装置本体的摄像机安装在电动推杆的上端,计算机视觉识别装置本体的计算机安装在设备室内;所述激光测距仪有三套,三套激光测距仪分别安装在电动推杆的下端及上端前侧;所述焦距调节机构包括电机减速机构、驱动轮、干簧管,电机减速机构安装在摄像机的壳体前端一侧外,驱动轮安装在电机减速机构的动力输出轴前、且驱动胶轮的侧端和摄像机的焦距调节环侧端紧密接触,壳体前端另一侧安装有支撑杆,干簧管有两只,两只干簧管分别安装在支撑杆前内侧端,焦距调节环上端安装有磁铁;所述电源模块、左右探测控制电路、上下探测控制电路、焦距调节控制电路安装在元件盒内;所述左右探测控制电路的电源输出端和电动直线滑台的电源输入端电性连接,上下探测控制电路的电源输出端和电动推杆的电源输入端电性连接,焦距调节控制电路的电源输出端和电机减速机构的电源输入端电性连接;所述三套激光测距仪的信号输出端和左右探测控制电路、上下探测控制电路、焦距调节控制电路的信号输入端分别电性连接。
2.根据权利要求1所述的一种计算机视觉识别装置,其特征在于,干簧管是常闭触点干簧管。
3.根据权利要求1所述的一种计算机视觉识别装置,其特征在于,焦距调节控制电路包括电性连接的可调电阻、电阻、npn三极管和继电器,并和两只干簧管电性连接,两只可调电阻一端连接,第一只可调电阻另一端和第一只电阻一端、第二只电阻一端连接,第二只可调电阻另一端和第三只电阻一端、第四只电阻一端连接,第二只电阻另一端、第四只电阻另一端和两只npn三极管发射极、两只继电器负极控制电源输入端连接,两只npn三极管集电极和两只继电器负极电源输入端连接,两只继电器正极电源输入端及正极控制电源输入端连接,第一只电阻另一端、第三只电阻另一端和两只npn三极管基极分别连接,第一只继电器其中一个常开触点端、第二只继电器其中一个常闭触点端和两只干簧管一端分别连接。
4.根据权利要求1所述的一种计算机视觉识别装置,其特征在于,左右调节控制电路和上下探测控制电路构造一致,分别包括电性连接的可调电阻、电阻、npn三极管和时控开关、pnp三极管、时间继电器模块,可调电阻一端和第一只电阻一端、第二只电阻一端连接,第二只电阻另一端和npn三极管发射极、两套时控开关的负极电源输入端、时间继电器模块的负极电源输入端及负极触发信号输入端连接,第一只电阻另一端和npn三极管基极连接,npn三极管集电极和pnp三极管基极连接,pnp三极管集电极和时间继电器模块的正极触发信号输入端连接,pnp三极管发射极和时间继电器模块的正极电源输入端连接,时间继电器模块的电源输出端和两套时控开关的正极电源输入端连接。
5.根据权利要求4所述的一种计算机视觉识别装置,其特征在于,上下探测调节电路、左右探测调节电路的pnp三极管集电极、npn三极管发射极和一只控制继电器正极及负极两极电源输入端分别电性连接,控制继电器的控制电源输入端及常开触点端分别电性串联在pnp三极管发射极和时间继电器模块的正极电源输入端之间。
技术总结
一种计算机视觉识别装置,包括计算机视觉识别装置本体、电动直线滑台、激光测距仪、电动伸缩杆、电源模块,还具有焦距调节机构、左右探测控制电路、上下探测控制电路、焦距调节控制电路;电动推杆下端安装在电动直线滑台的滑动块上端,摄像机安装在电动推杆的上端,三套激光测距仪分别安装在电动推杆的下端及上端前侧;焦距调节机构包括和摄像机安装在一起的电机减速机构、驱动轮、干簧管,电源模块、左右探测控制电路、上下探测控制电路、焦距调节控制电路安装在元件盒内并电性连接。本发明当生产设备左右、上下发生位移,以及焦距发生变化时,能保证镜头上或下、左或右及有效聚焦对准移动的生产设备,获得好的图片采集效果。
技术研发人员:陆易
受保护的技术使用者:陆易
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!