用于机器人智能传动关节的磁流变阻尼器
本发明涉及阻尼器,特别涉及一种用于机器人智能传动关节的磁流变阻尼器。
背景技术:
1、在关节机器人领域,如臂式机器手、腿式机器人、外骨骼机器人、医疗机器人、家庭服务机器人等智能装备中,随着对机器人使用的要求的升级,在一些场合需要机器人在动作及力度输出上具有一定的柔性,或者具有缓冲减震的功能。
2、传统的弹簧阻尼被动式减震器由于体积大、减震性能主要依赖自身结构来实现,不适宜于机器人的关节减震。其次,液压缓冲作动器虽然能够实现机器人关节的智能缓冲与减震,但由于需要一个液压泵站、且存在液压油泄露等问题,并不能满足以上应用场合的需要。
3、因此,在机器人传动关节领域,亟需一种能够结构紧凑、功率密度大、控制简单、响应灵敏的具有柔性传动功能的缓冲阻尼器,能够和伺服电机、减速器配合工作,起到对机器人关节进行智能缓冲和减震作用的阻尼器装置。
技术实现思路
1、本发明的目的在于提供一种机器人智能传动关节的磁流变阻尼器,该机器人智能传动关节的磁流变阻尼器结构紧凑、功率密度大。
2、为解决上述技术问题,本发明提供一种用于机器人智能传动关节的磁流变阻尼器,包括:
3、缸筒;所述缸筒为筒状且设有励磁线圈;
4、转动轴,所述转动轴位于所述缸筒内且可绕其轴线转动;
5、转子,所述转子的外周与所述缸筒内壁间隔设置且形成封闭的填充通道,所述转子包括:
6、转子本体,所述转子本体为与所述转动轴同轴的环状且套设于所述转动轴外周;以及
7、多对凸环,多对所述凸环中的两个所述凸环分别连接至所述转子本体沿轴向的前侧和后侧,每个所述凸环均沿所述转子本体的周向延伸,沿径向相邻的两个所述凸环间隔设置;以及
8、磁流变液体,所述磁流变弹性体位于所述转子与所述缸筒内壁之间,所述磁流变液体可感应所述励磁线圈的磁场并发生形体变化。
9、在一个实施例中,两对所述凸环连接至所述转子本体。
10、在一个实施例中,所述转子与所述转动轴通过键连接。
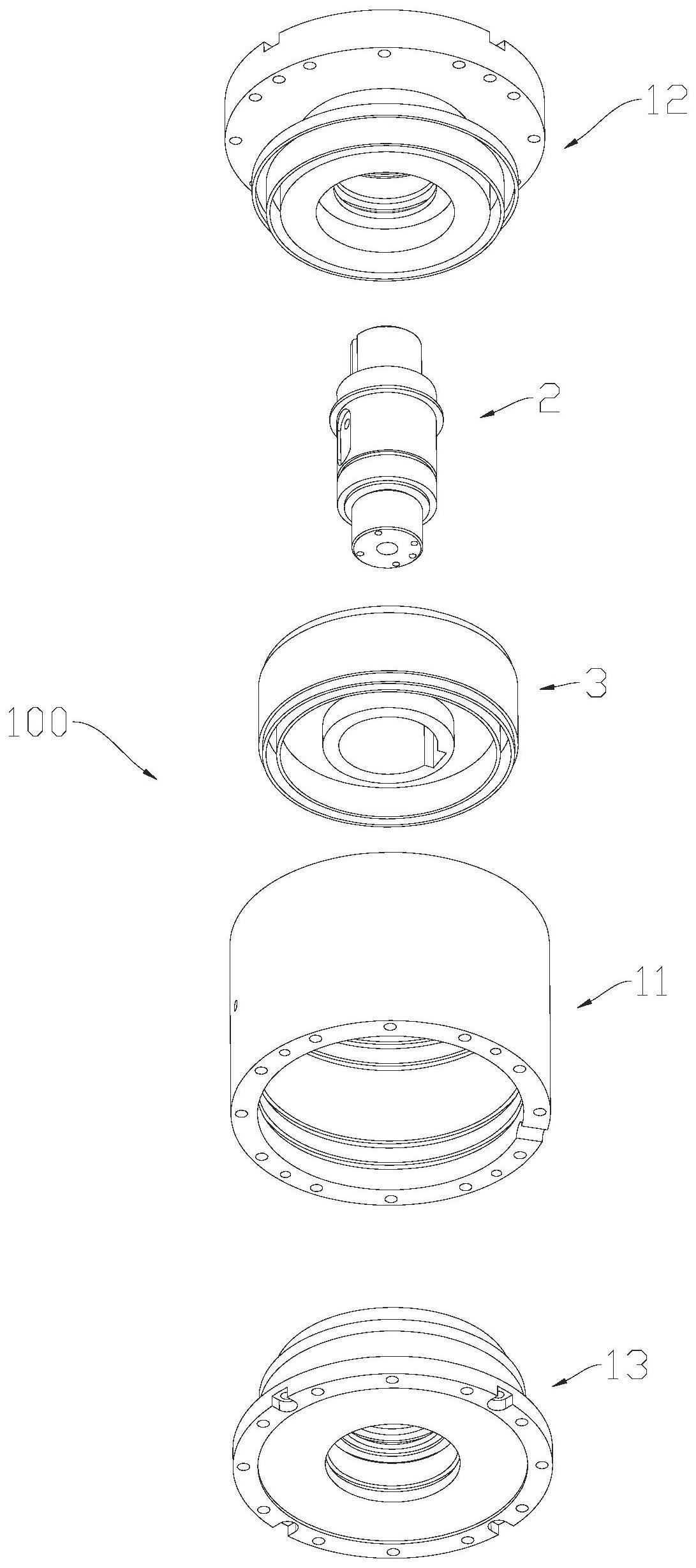
11、在一个实施例中,缸筒包括:
12、侧壁,所述侧壁为绕所述转动轴的轴线延伸形成的筒状,所述侧壁具有前端开口和后端开口,所述侧壁与所述转子本体的径向外侧间隔设置;
13、前端盖,所述前端盖覆盖所述前端开口并连接至所述侧壁的前端,所述前端盖的内端形状与所述转子的前侧互补且间隔设置;
14、后端盖,所述后端盖覆盖所述后端开口并连接至所述侧壁的后端;所述后端盖的内端形状与所述转子的后侧形状互补且间隔设置;
15、所述磁流变液体分别位于所述侧壁与所述转子本体的径向外侧之间、所述前端盖与所述转子的前侧之间以及所述后端盖与所述转子的后侧之间。
16、在一个实施例中,所述前端盖和所述后端盖分别设有绕所述转动轴的轴线延伸的环形凹槽,两个所述励磁线圈分别安装于两个所述环形凹槽内。
17、在一个实施例中,所述转子本体环套于所述转动轴的中间部位;
18、所述用于机器人智能传动关节的磁流变阻尼器还包括应变片,所述应变片贴合所述转动轴外表面且位于所述转动轴沿轴向的中间部位,用于感应所述转动轴的扭矩。
19、在一个实施例中,所述转动轴的外表面设有安装槽,所述安装槽位于所述转动轴沿轴向的中间部位,所述安装槽的深度与所述应变片的厚度相同;所述应变片位于所述安装槽内。
20、在一个实施例中,所述转动轴设有线槽,所述线槽包括相互连通的第一段和第二段,所述第一段沿轴向延伸,所述第二段的一端与所述安装槽连通,另一端与所述第一段连通,所述线槽用于安装应变片的连接线。
21、在一个实施例中,还包括:
22、信号采集装置,所述信号采集装置与所述应变片电连接;
23、控制器,所述控制器与所述信号采集装置以及所述励磁线圈电连接,用于接收所述信号采集装置的信号以及控制所述所述励磁线圈的电流。
24、在一个实施例中,所述填充通道的的宽度范围为0.5mm-1mm。
技术特征:
1.一种用于机器人智能传动关节的磁流变阻尼器,其特征在于,包括:
2.根据权利要求1所述的用于机器人智能传动关节的磁流变阻尼器,其特征在于,两对所述凸环连接至所述转子本体。
3.根据权利要求1所述的用于机器人智能传动关节的磁流变阻尼器,其特征在于,所述转子与所述转动轴通过键连接。
4.根据权利要求1所述的用于机器人智能传动关节的磁流变阻尼器,其特征在于,缸筒包括:
5.根据权利要求4所述的用于机器人智能传动关节的磁流变阻尼器,其特征在于,所述前端盖和所述后端盖分别设有绕所述转动轴的轴线延伸的环形凹槽,两个所述励磁线圈分别安装于两个所述环形凹槽内。
6.根据权利要求1所述的用于机器人智能传动关节的磁流变阻尼器,其特征在于,所述转子本体环套于所述转动轴的中间部位;
7.根据权利要求6所述的用于机器人智能传动关节的磁流变阻尼器,其特征在于,所述转动轴的外表面设有安装槽,所述安装槽位于所述转动轴沿轴向的中间部位,所述安装槽的深度与所述应变片的厚度相同;所述应变片位于所述安装槽内。
8.根据权利要求7所述的用于机器人智能传动关节的磁流变阻尼器,其特征在于,所述转动轴设有线槽,所述线槽包括相互连通的第一段和第二段,所述第一段沿轴向延伸,所述第二段的一端与所述安装槽连通,另一端与所述第一段连通,所述线槽用于安装应变片的连接线。
9.根据权利要求6所述的用于机器人智能传动关节的磁流变阻尼器,其特征在于,还包括:
10.根据权利要求1所述的用于机器人智能传动关节的磁流变阻尼器,其特征在于,所述填充通道的的宽度范围为0.5mm-1mm。
技术总结
本发明公开了一种用于机器人智能传动关节的磁流变阻尼器,所述用于机器人智能传动关节的磁流变阻尼器应用于机器人关节,包括缸筒、转动轴、转子、和磁流变液体,所述缸筒为筒状且设有励磁线圈;所述转动轴位于所述缸筒内且可绕其轴线转动,所述转子的外周与所述缸筒内壁间隔设置且形成封闭的填充通道,且包括转子本体和多对凸环,所述转子本体为与所述转动轴同轴的环状且套设于所述转动轴外周;多对所述凸环中的两个所述凸环分别连接至所述转子本体沿轴向的前侧和后侧,每个所述凸环均沿所述转子本体的周向延伸,沿径向相邻的两个所述凸环间隔设置;所述磁流变弹性体位于所述转子与所述缸筒内壁之间,所述磁流变液体可感应所述励磁线圈的磁场并发生形体变化。
技术研发人员:吕宏展,杨海
受保护的技术使用者:东华大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!