一种丝杆组件和机器人的制作方法
本发明涉及工业机器人,具体涉及一种丝杆组件和机器人。
背景技术:
1、scara机器人j3、j4轴由滚珠丝杆花键构成,滚珠丝杆花键有丝杆、花键螺母、丝杆螺母组成,其存在以下缺陷:(1)花键螺母和丝杆螺母分为内圈和外圈,内外圈类似于轴承的配合,其具有轴承同样的径向跳动问题,造成j3、j4轴重复性差;(2)负载所带来的径向力,全部由丝杆螺母承受,一定程度上影响丝杆的寿命。
2、由于现有技术中的水平多关节机器人的花键螺母和丝杆螺母的内外圈存在径向跳动,而导致scara机器人j3、j4关节重复性定位精度低等技术问题,因此本发明研究设计出一种丝杆组件和机器人。
技术实现思路
1、因此,本发明要解决的技术问题在于克服现有技术中的水平多关节机器人的花键螺母和丝杆螺母的内外圈存在径向跳动,而导致j3、j4关节重复性定位精度低的缺陷,从而提供一种丝杆组件和机器人。
2、为了解决上述问题,本发明提供一种丝杆组件,其包括:
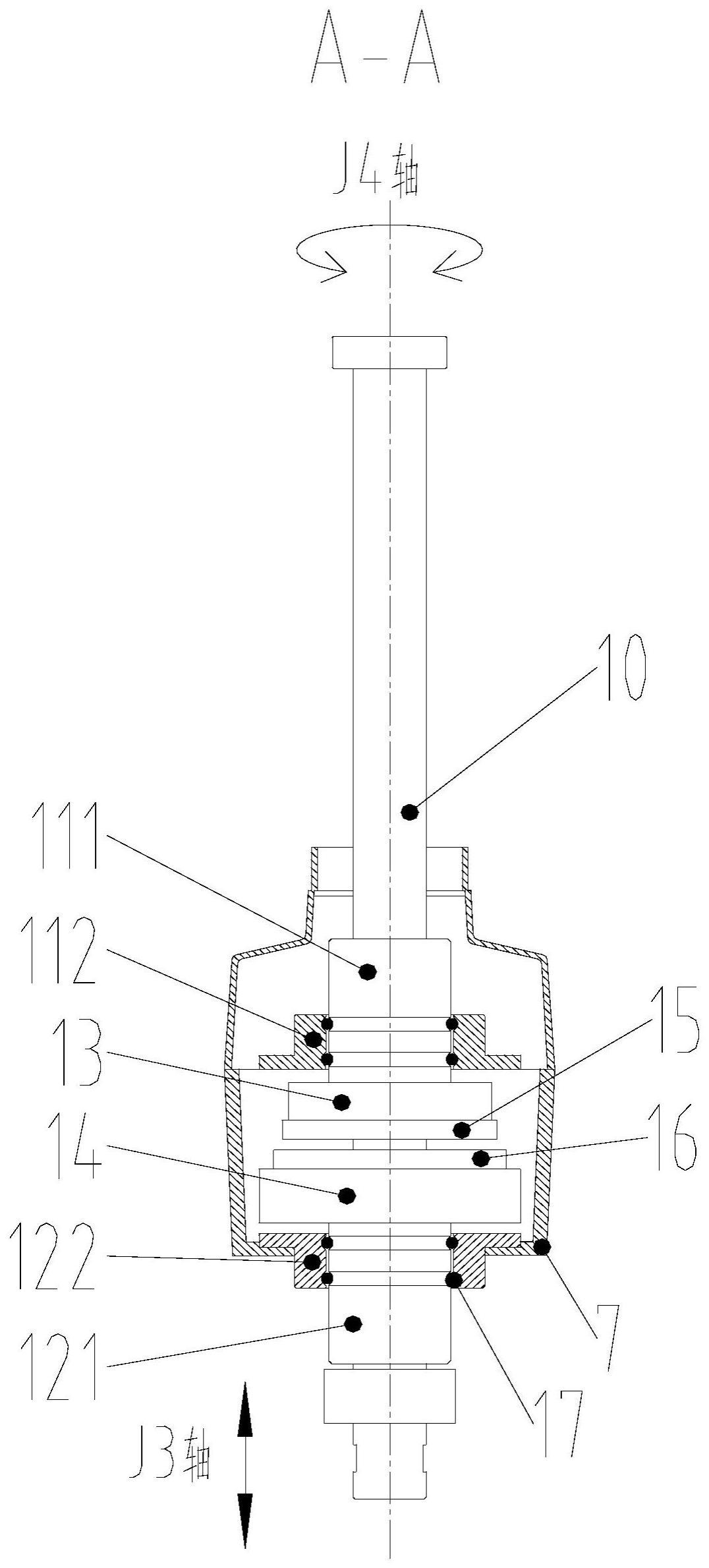
3、丝杆、第一传动轮、第二传动轮、丝杆螺母内圈、花键螺母内圈和磁力装置,所述第一传动轮能带动所述丝杆螺母内圈转动,第二传动轮能带动所述花键螺母内圈转动,所述磁力装置能产生磁力使得所述第一传动轮与所述第二传动轮产生相背方向的力,进而使得所述花键螺母内圈产生朝远离所述丝杆螺母内圈方向的运动或运动趋势,所述丝杆螺母内圈产生朝远离所述花键螺母内圈方向的运动或运动趋势。
4、在一些实施方式中,所述磁力装置包括第一磁性结构和第二磁性结构,所述第一磁性结构与所述第一传动轮连接为一体,所述第二磁性结构与所述第二传动轮连接为一体,所述第一磁性结构与所述第二磁性结构之间产生磁性斥力。
5、在一些实施方式中,所述第一磁性结构为电磁铁或永磁体,所述第二磁性结构为电磁铁或永磁体。
6、在一些实施方式中,所述第一磁性结构设置于所述第一传动轮的朝向所述第二传动轮的一侧的端面上,所述第二磁性结构设置于所述第一传动轮的朝向所述第二传动轮的一侧的端面上;所述第一磁性结构与所述第二磁性结构相对且间隔设置。
7、在一些实施方式中,所述第一磁性结构和所述第二磁性结构均为环形结构,均能允许所述丝杆从中穿过。
8、在一些实施方式中,还包括丝杆螺母外圈,所述丝杆螺母外圈套设于所述丝杆螺母内圈的外周,所述丝杆螺母内圈能相对于所述丝杆螺母外圈转动,所述丝杆螺母外圈还对所述丝杆螺母内圈的轴向运动进行限位,所述丝杆螺母内圈和所述丝杆螺母外圈组成丝杆螺母;
9、所述丝杆螺母内圈的内周壁上设置有内螺纹,所述丝杆的外周壁上设置有外螺纹,所述内螺纹与所述外螺纹匹配相接,使得所述丝杆螺母内圈与所述丝杆之间形成配合的螺旋副,所述丝杆螺母内圈被单独驱动转动时其带动所述丝杆相对于所述丝杆螺母内圈沿轴向运动的同时还能转动。
10、在一些实施方式中,还包括花键螺母外圈,所述花键螺母外圈套设于所述花键螺母内圈的外周,所述花键螺母内圈相对于所述花键螺母外圈转动,所述花键螺母外圈还对所述花键螺母内圈的轴向运动进行限位,所述花键螺母内圈和所述花键螺母外圈组成花键螺母;
11、所述花键螺母内圈的内周壁上设置有花键槽,所述丝杆的外周壁上设置有花键,所述花键与所述花键槽匹配相接,使得所述花键螺母内圈与所述丝杆之间形成配合的转动副,所述花键螺母内圈被单独驱动转动时其带动所述丝杆跟随所述花键螺母内圈一体转动,所述丝杆能相对于所述花键螺母内圈沿轴向运动。
12、本发明还提供一种机器人,其包括前述的丝杆组件。
13、在一些实施方式中,当所述丝杆组件还包括丝杆螺母外圈和花键螺母外圈时:
14、所述机器人还包括第一机械臂和第二机械臂,所述第一机械臂的一端形成为第一旋转轴,即j1轴,所述第一机械臂能绕着所述j1轴转动,所述第一机械臂的另一端与所述第二机械臂的一端转动连接,形成第二旋转轴,即j2轴,所述第二机械臂能绕着所述j2轴转动,所述第二机械臂的另一端设置所述丝杆、所述第一传动轮、所述第二传动轮、所述丝杆螺母内圈和所述花键螺母内圈;所述丝杆螺母外圈与所述第二机械臂固接,所述花键螺母外圈与所述第二机械臂固接。
15、在一些实施方式中,所述第二机械臂上还设置有第三电机和第四电机,所述第三电机能够驱动所述第一传动轮转动,所述第四电机能够驱动所述第二传动轮转动;所述第一传动轮为丝杆螺母带轮,所述第二传动轮为花键螺母带轮,通过同时驱动所述第一传动轮和所述第二传动轮转动,以驱动所述丝杆进行轴向运动和/或转动。
16、本发明提供的一种丝杆组件和机器人具有如下有益效果:
17、本发明通过设置磁力装置,对第一和第二传动轮产生相背方向的力,进而使得花键螺母内圈产生远离丝杆螺母内圈方向的运动或运动趋势,丝杆螺母内圈产生远离花键螺母内圈方向的运动或运动趋势,能够对花键螺母内外圈施加轴向预紧力,减小花键螺母内圈的径向跳动,同时对丝杆螺母内外圈施加轴向预紧力,减小丝杆螺母内圈的径向跳动,从而提高scara机器人j3、j4关节重复性定位精度。另一方面,本发明还通过磁力装置产生的磁力有效地将滚珠丝杆花键末端负载产生的轴向力分散到花键螺母上,减轻丝杆螺母的受力,提高丝杆螺母的寿命。
技术特征:
1.一种丝杆组件,其特征在于:包括:
2.根据权利要求1所述的丝杆组件,其特征在于:
3.根据权利要求2所述的丝杆组件,其特征在于:
4.根据权利要求2所述的丝杆组件,其特征在于:
5.根据权利要求2-4中任一项所述的丝杆组件,其特征在于:
6.根据权利要求1-5中任一项所述的丝杆组件,其特征在于:
7.根据权利要求6所述的丝杆组件,其特征在于:
8.一种机器人,其特征在于:包括权利要求1-7中任一项所述的丝杆组件。
9.根据权利要求8所述的机器人,其特征在于:
10.根据权利要求9所述的机器人,其特征在于:
技术总结
本发明提供一种丝杆组件和机器人,丝杆组件包括:丝杆、第一传动轮、第二传动轮、丝杆螺母内圈、花键螺母内圈和磁力装置,第一传动轮能带动丝杆螺母内圈转动,第二传动轮能带动花键螺母内圈转动,磁力装置能产生磁力使得第一传动轮与第二传动轮产生相背方向的力,进而使得花键螺母内圈产生朝远离丝杆螺母内圈方向的运动或运动趋势,丝杆螺母内圈产生朝远离花键螺母内圈方向的运动或运动趋势。根据本发明能够对花键螺母内外圈施加轴向预紧力,减小花键螺母内圈的径向跳动,同时对丝杆螺母内外圈施加轴向预紧力,减小丝杆螺母内圈的径向跳动,从而提高SCARA机器人J3、J4关节重复性定位精度。
技术研发人员:饶顺,孔令超,曹璟玉,莫子扬,蔡武,王荣耀
受保护的技术使用者:珠海格力电器股份有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!