一种两栖状态下污水管网检测机器人的制作方法
本技术涉及一种检测机器人,尤其是一种工作状态下污水管道检测机器人。
背景技术:
1、城市污水管网运营状态的好坏直接影响着城市建设发展的规模,保证城市有一个科学畅通的污水管网系统,对满足城市居民的基本生活与工业生产的排水系统建设尤为重要,总体来看,我国污水管网排水设施建设已初具规模,但在污水管网日常运营和维护的速度确跟不上城市的发展,特别是一些老城区污水管网系统,存在污水管道内淤积、污水管道破损较严重,特别是在雨季极易造成污水管道内污水外溢,给城市环境卫生造成重大影响,同时,也存在污水管道破损很长时间才被发现,对管道上覆岩层造成大量的冲刷侵蚀,极易造成上覆地表路面塌陷产生重大安全事故。
2、国家相关职能部门近年来相继发布了关于加强公共管网漏损控制检测的通知,要求管网漏损率控制在9%以内,同时要持续改善环境质量,排水管网已由城市重要的基础设施升级为保障人民幸福生活的重大民生工程,因此,对城市排水管网进行系统性的检测已成为一项重要的城市治理任务。
3、城市污水管网通常由φ800混凝土管组成,管网的直径限制了人工日常的巡视检测工作,特别是一些污水管道由于长时间未能得到有效清理,管网内部淤积严重,污水管网处于满水或近满水状态,行业检测机器人通常为单一轮式功能的检测机器人,轮式检测机器人无法在此种管道内行走进行检测,此时需更换螺旋式检测机器人进行检测,当管道内少水或无水状态下时再更换为轮式检测机器人,检测时至少需准备两种检测机器人进行轮换作业,当管道连接的污水检查井距离较远及检查井之间的地势差较大时,将严重影响污水管网的检测工作,污水管网检测环境的特殊性很容易造成检测机器人本体上的摄像头被污渍侵染,造成检测过程中拍摄的视频、图片模糊无法作为有效的管网巡检参考依据。
4、为了保障污水管网检测的准确性,检测系统运营的稳定性,现有设备存在适应性单一、检测效率低等缺点,需对现有技术进一步改进。
技术实现思路
1、针对上述现有技术的不足,本实用新型的目的是提供一种两栖状态下污水管网检测机器人,解决现有检测机器人适用性单一、检测效率低,拍摄视频及图像不清晰等问题。
2、为了解决上述问题,本实用新型所采用的技术方案是:
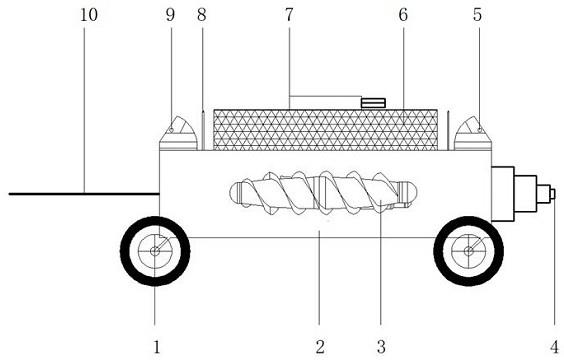
3、一种两栖状态下污水管网检测机器人,包括行走轮、机器人本体、螺旋行走机构、声呐装置、前置摄像头、锂电池、激光扫描仪、高压喷射装置、后置摄像头、信号传输线缆束等,检测机器人由两种行走模式,分别为行走轮和螺旋行走装置,管道内少水或无水状态下时采用行走轮模式进行移动,管道内水量较大时采用螺旋行走装置进行移动,机器人本体下部分布着行走轮,机器人本体的两侧分布着螺旋行走机构,机器人本体的上部分布着锂电池、摄像头、高压喷射装置,锂电池为检测机器人行走机构、摄像头、激光扫描仪、声呐装置提供电能,摄像头在机器人本体的上部前后各设置1个,可对机器人前进、后退进行视频拍摄,摄像头具备360°旋转功能,锂电池的上部设置激光扫描仪,配合摄像机对无水或少水的管道进行检测,机器人本体的前侧布置声呐装置,声呐装置配合螺旋行走装置对满水或近满水管网进行检测,摄像头的一侧布置超细高压喷头,能够通过信号传输线缆束输入信号启动机器人本体中的水泵,保障摄像机的清洁度,机器人收集的数据通过信号传输线缆传输至地面控制系统,能够保障地下空间数据传输的稳定性。
4、优选地,行走轮为圆形轮式结构,外侧为橡胶轮胎,直径通常为15cm,大小可进行调节,满足在污水管道内行走,行走轮的数量为4个,左右行走轮通过轴承连接在机器人本体的下部,轴承的两侧连接有可弯曲的关节,行走轮工作时处于竖直状态,行走轮不工作时处于水平状态。
5、优选地,螺旋行走机构分布在机器人本体的两侧,螺旋行走机构由2个螺旋体组成,螺旋行走机构的为椭圆形螺纹结构,螺旋行走机构的大小与机器人本体、行走轮在空间上均衡布置。
6、优选地,摄像头前后各一个分布在机器人本体的上部,摄像头为360度可旋转的球型结构,摄像头自带补光功能,保障在污水管道拍摄图像的清晰度,同时,为有效避免污水对摄像头造成污渍干扰,在摄像头的一侧设置超细高压喷头,可对摄像头上的污渍进行喷射清理。
7、优选地,检测机器人具备激光扫描仪和声呐两种检测模式,根据污水管道充水的多少进行模式的切换,保障机器人对污水管道检测的全面性、准确性。
8、优选地,机器人各系统单元具有良好的防水效果,摄像头、激光扫描仪、声呐、锂电池、机器人本体具备ip68防护等级,保障机器人各部件在水中运行的稳定性。
9、优选地,锂电池提供12v直流低压电源,保障水下检测环境用电的安全,机器人本体中含有1个小型水箱和1个供水泵用于摄像头清洗。
10、优选地,摄像头前后各布设一个,摄像头自带补光功能,遵循全球统一的技术和通讯协议tcp/ip,通过信号传输线缆进行数据传输至地面操作平台。检测机器人获取的数据通过信号传输线缆束传输至地面控制台,避免无线传输信号在地下被屏蔽造成数据的丢失。
11、当然,上述说明并非是对本实用新型的限制,本实用新型也并不仅限于上述举例,本技术领域的技术人员在本实用新型的实质范围内所做出的变化、改型、添加或替换,也应属于本实用新型的保护范围。
技术特征:
1.一种两栖状态下污水管网检测机器人,包括行走轮、机器人本体、螺旋行走机构、声呐装置、前置摄像头、锂电池、激光扫描仪、高压喷射装置、后置摄像头、信号传输线缆束等,其特征是,行走轮位于机器人本体的下部,行走轮由4个轮组成,螺旋行走机构由2个螺旋体组成,螺旋行走机构分布在机器人本体的左右两侧,声呐装置安装在机器人本体的前侧,摄像头由前后两个摄像头组成,摄像头可实现360°旋转拍摄,锂电池放置在机器人本体的上部,为行走轮、螺旋行走机构、声呐装置、摄像头、激光扫描仪等提供电能,激光扫描仪放置在锂电池的上部,信号传输线缆连接口位于机器人本体的后侧,将系统获得的数据传输至地面操作系统。
2.根据权利要求1所述的一种两栖状态下污水管网检测机器人,其特征在于,机器人各系统单元具有良好的防水效果,具有ip68防水等级,保障在管网充水状态下,系统各部分检测的可靠性和稳定性。
3.根据权利要求1所述的一种两栖状态下污水管网检测机器人,其特征在于,污水管网充水较多或满水状态下,行走轮收起,螺旋行走机构伸出开始工作,管网检测机器人漂浮在污水表面,通过声呐装置对污水管网缺陷状态进行检测。
4.根据权利要求1所述的一种两栖状态下污水管网检测机器人,其特征在于,污水管网充水较少或无水状态下,螺旋行走机构停止工作,行走轮下放,通过行走轮在污水管道的内部进行行走,并借助激光扫描仪对污水管道的缺陷状态进行检测。
5.根据权利要求1所述的一种两栖状态下污水管网检测机器人,其特征在于,摄像头前后各布设一个,摄像头自带补光功能,遵循全球统一的技术和通讯协议tcp/ip,通过信号传输线缆进行数据传输至地面操作平台。
技术总结
本技术提供一种两栖状态下污水管网检测机器人,包括行走轮、机器人本体、螺旋行走机构、声呐装置、前置摄像头、锂电池、激光扫描仪、后置摄像头、高压喷射器、信号传输线缆束,行走系统包括行走轮和螺旋行走机构,行走轮布设在机器人本体的下部,螺旋行走机构布设在机器人本体的左右两侧,锂电池为检测机器人的行走系统、摄像头、激光扫描仪、声呐装置等提供电能供应,摄像头可实现360°旋转摄像,满水状态下声呐辅助对污水管网进行检测,无水或少水状态下激光扫描仪对污水管网进行扫描检测,检测数据通过信号传输线缆束传输至地面数据接收系统,实现机器人的一机多用检测功能。本技术结构设计新颖,检测快速便捷,安全可靠。
技术研发人员:王巧俏,侯郡召,李傲,高维,彭静,刘笑,冯斌,张旭,赵梦亭,邵彦轲,刘延栋,孟令民,张信权
受保护的技术使用者:凯丰智慧(山东省)市政工程有限公司
技术研发日:20220928
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!