一种可视化越障机器人的制作方法
本技术属于机器人,具体涉及一种可视化越障机器人。
背景技术:
1、电缆沟内部空间狭小,并且光线不足,使得人工巡查设备和电缆的作业较为艰难。
2、一般情况下可以采用机器人代替人工巡检,机器人能根据复杂地形灵活移动,从而能够实现全时段清晰的捕捉到电缆沟的全外貌特征,通过预留功能扩展接口来实现远程自动巡视。
3、机器人在巡检电缆沟时,常规的机器人巡检需要通过驱动轮组件来进行移动,但是在遇到坑洼较深的地方时,机器人的驱动轮会陷入在坑洼内,影响到机器人的行走,甚至还会造成机器人停留在坑洼的位置难以摆脱。
技术实现思路
1、本申请实施例提供了一种可视化越障机器人,能够当机器人行走在坑洼较深的电缆沟通道中时,通过辅助轮将机器人的前侧位置抬升,同时旋转的辅助轮可以配合后驱动轮进行前进,保证该可视化机器人越过坑洼的地方,进而使得该机器人可以在电缆沟的通道内灵活移动,方便进行电缆沟内设备和电缆的勘察。
2、本实施例提供一种可视化越障机器人,包括电池仓和摄像装置,所述电池仓于前端设有两个前驱动轮,所述电池仓于后端设有两个后驱动轮,所述摄像装置设置在所述电池仓上,位于所述电池仓同侧的所述前驱动轮与所述后驱动轮之间设置有辅助轮,所述辅助轮通过传动组件与所述前驱动轮连接,以使所述辅助轮与所述前驱动轮沿着同方向同步转动,所述电池仓上设置有第一气缸,所述第一气缸的伸缩端与所述传动组件靠近所述辅助轮的一端连接,当机器人的所述前驱动轮陷入坑洼内时,所述第一气缸用于带动所述传动组件靠近所述辅助轮的一端向下旋转,以使所述辅助轮抵在坑洼后方的边缘地面上,从而将机器人的前端位置抬升。
3、在一种可行的实现方式中,所述传动组件包括第一齿盘、第二齿盘、第三齿盘和连接板,所述第一齿盘固定套设在所述前驱动轮的旋转轴上,所述连接板包括第一端和第二端,所述第一端套设在所述前驱动轮的旋转轴上,所述第三齿盘和所述辅助轮通过转动轴设置在所述第二端的两侧,且所述转动轴贯穿所述第二端,所述连接板上还设置有所述第二齿盘,且所述第一齿盘、第二齿盘和第三齿盘依次啮合连接。
4、在一种可行的实现方式中,所述传动组件的数量为两组,所述辅助轮和所述第一气缸的数量为两个,且均对称设置在所述电池仓的两侧。
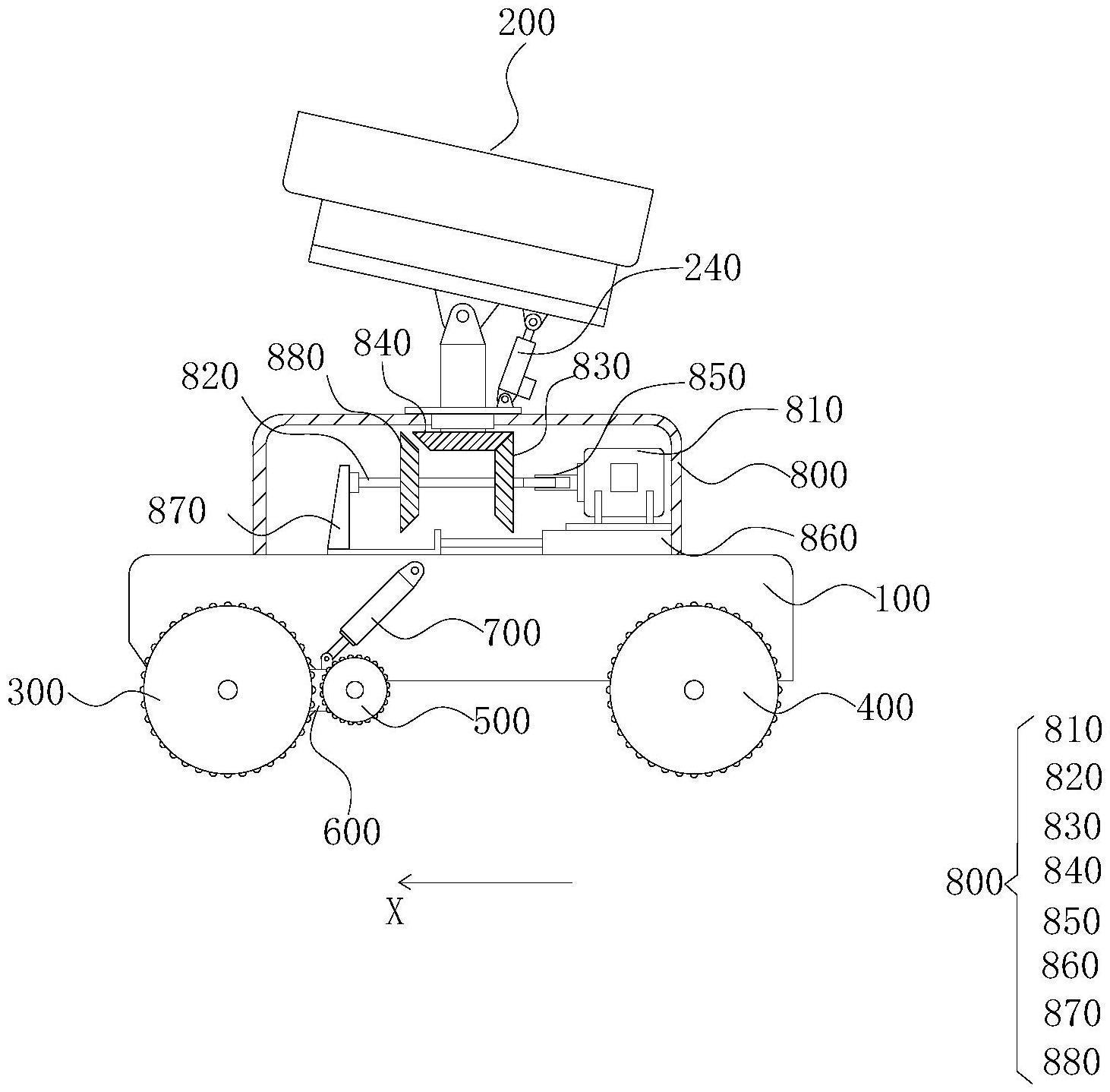
5、在一种可行的实现方式中,所述摄像装置包括转动座、第一摄像头、第二摄像头和电动推杆,所述转动座的一端通过支座分别与所述第一摄像头和所述第二摄像头转动连接,所述电动推杆的两端分别与所述转动座和所述支座连接,以使所述第一摄像头和所述第二摄像头进行转动。
6、在一种可行的实现方式中,所述转动座的另一端与所述电池仓的顶部固定连接。
7、在一种可行的实现方式中,所述电池仓的顶部设置有防护仓,所述防护仓的顶部通过轴承与所述转动座的另一端转动连接。
8、在一种可行的实现方式中,所述防护仓内设置有电机、转动杆、第一锥齿轮和第二锥齿轮,所述电机的输出端设置有导向套,所述导向套与所述转动杆连接,所述转动杆上固定套设有所述第一锥齿轮,所述第一锥齿轮与所述第二锥齿轮啮合,所述第二锥齿轮设置于所述转动杆的正上方,所述转动座与所述防护仓连接的一端贯穿所述防护仓的顶部,且与所述第二锥齿轮的一端对接。
9、在一种可行的实现方式中,所述防护仓内还设置有第二气缸、连接座和第三锥齿轮,所述第二气缸的输出端与所述连接座连接,所述连接座的一侧与所述转动杆远离所述电机的一端转动连接,所述导向套与所述转动杆插接连接,所述连接座与所述第一锥齿轮之间的所述转动杆上固定套设有所述第三锥齿轮,所述第三锥齿轮与所述第一锥齿轮对称设置,所述第二气缸带动所述连接座靠近或者远离所述第二锥齿轮移动,当所述连接座远离所述第二锥齿轮时,所述第一锥齿轮与所述第二锥齿轮啮合,以实现所述转动座的正转;当所述连接座靠近所述第二锥齿轮时,所述第三锥齿轮与所述第二锥齿轮啮合,以实现所述转动座的反转。
10、在一种可行的实现方式中,所述第二摄像头为红外夜视摄像头。
11、本申请实施例提供一种可视化越障机器人,在前驱动轮与后驱动轮之间设置辅助轮,辅助轮通过传动组件与前驱动轮连接,以使辅助轮与前驱动轮沿着同方向同步转动,电池仓上设置的第一气缸的伸缩端与传动组件靠近辅助轮的一端连接,当机器人的前驱动轮陷入坑洼内时,第一气缸带动传动组件靠近辅助轮的一端向下旋转,以使辅助轮抵在坑洼后方的边缘地面上,从而将机器人的前端位置抬升,同时旋转的辅助轮可以配合后驱动轮进行前进,保证该可视化机器人越过坑洼的地方,进而使得该机器人可以在电缆沟的通道内灵活移动,方便进行电缆沟内设备和电缆的勘察。
技术特征:
1.一种可视化越障机器人,其特征在于,包括电池仓和摄像装置,所述电池仓于前端设有两个前驱动轮,所述电池仓于后端设有两个后驱动轮,所述摄像装置设置在所述电池仓上,位于所述电池仓同侧的所述前驱动轮与所述后驱动轮之间设置有辅助轮,所述辅助轮通过传动组件与所述前驱动轮连接,以使所述辅助轮与所述前驱动轮沿着同方向同步转动,所述电池仓上设置有第一气缸,所述第一气缸的伸缩端与所述传动组件靠近所述辅助轮的一端连接,当机器人的所述前驱动轮陷入坑洼内时,所述第一气缸用于带动所述传动组件靠近所述辅助轮的一端向下旋转,以使所述辅助轮抵在坑洼后方的边缘地面上,从而将机器人的前端位置抬升。
2.根据权利要求1所述的一种可视化越障机器人,其特征在于,所述传动组件包括第一齿盘、第二齿盘、第三齿盘和连接板,所述第一齿盘固定套设在所述前驱动轮的旋转轴上,所述连接板包括第一端和第二端,所述第一端套设在所述前驱动轮的旋转轴上,所述第三齿盘和所述辅助轮通过转动轴设置在所述第二端的两侧,且所述转动轴贯穿所述第二端,所述连接板上还设置有所述第二齿盘,且所述第一齿盘、第二齿盘和第三齿盘依次啮合连接。
3.根据权利要求1所述的一种可视化越障机器人,其特征在于,所述传动组件的数量为两组,所述辅助轮和所述第一气缸的数量为两个,且均对称设置在所述电池仓的两侧。
4.根据权利要求1-3任一项所述的一种可视化越障机器人,其特征在于,所述摄像装置包括转动座、第一摄像头、第二摄像头和电动推杆,所述转动座的一端通过支座分别与所述第一摄像头和所述第二摄像头转动连接,所述电动推杆的两端分别与所述转动座和所述支座连接,以使所述第一摄像头和所述第二摄像头进行转动。
5.根据权利要求4所述的一种可视化越障机器人,其特征在于,所述转动座的另一端与所述电池仓的顶部固定连接。
6.根据权利要求4所述的一种可视化越障机器人,其特征在于,所述电池仓的顶部设置有防护仓,所述防护仓的顶部通过轴承与所述转动座的另一端转动连接。
7.根据权利要求6所述的一种可视化越障机器人,其特征在于,所述防护仓内设置有电机、转动杆、第一锥齿轮和第二锥齿轮,所述电机的输出端设置有导向套,所述导向套与所述转动杆连接,所述转动杆上固定套设有所述第一锥齿轮,所述第一锥齿轮与所述第二锥齿轮啮合,所述第二锥齿轮设置于所述转动杆的正上方,所述转动座与所述防护仓连接的一端贯穿所述防护仓的顶部,且与所述第二锥齿轮的一端对接。
8.根据权利要求7所述的一种可视化越障机器人,其特征在于,所述防护仓内还设置有第二气缸、连接座和第三锥齿轮,所述第二气缸的输出端与所述连接座连接,所述连接座的一侧与所述转动杆远离所述电机的一端转动连接,所述导向套与所述转动杆插接连接,所述连接座与所述第一锥齿轮之间的所述转动杆上固定套设有所述第三锥齿轮,所述第三锥齿轮与所述第一锥齿轮对称设置,所述第二气缸带动所述连接座靠近或者远离所述第二锥齿轮移动,当所述连接座远离所述第二锥齿轮时,所述第一锥齿轮与所述第二锥齿轮啮合,以实现所述转动座的正转;当所述连接座靠近所述第二锥齿轮时,所述第三锥齿轮与所述第二锥齿轮啮合,以实现所述转动座的反转。
9.根据权利要求4所述的一种可视化越障机器人,其特征在于,所述第二摄像头为红外夜视摄像头。
技术总结
本技术提供一种可视化越障机器人,包括电池仓和摄像装置,所述电池仓于前端和后端分别设有两个前驱动轮和两个后驱动轮,位于所述电池仓同侧的前驱动轮与后驱动轮之间设置有辅助轮,所述辅助轮通过传动组件与前驱动轮连接,以使所述辅助轮与前驱动轮沿着同方向同步转动,所述电池仓上设置有第一气缸,所述第一气缸与传动组件一端连接,所述第一气缸用于带动传动组件靠近辅助轮的一端向下旋转,以使所述辅助轮抵在坑洼后方的边缘地面上,从而将机器人的前端位置抬升。本申请通过辅助轮和传动组件的设置,能够使可视化机器人越过坑洼的地方,进而使得该机器人可以在电缆沟的通道内灵活移动,方便进行电缆沟内设备和电缆的勘察。
技术研发人员:时孟评,关维罡,王华,刘双全,魏章聪,陈志祥,欧阳文艳,阳坚
受保护的技术使用者:云南电网有限责任公司文山供电分公司
技术研发日:20221025
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!