谐波减速器及工业机器人的制作方法
本申请涉及减速器,尤其涉及一种谐波减速器及工业机器人。
背景技术:
1、谐波减速器是工业机器人组成中不可或缺的一部分,用于安装在关节部位以提高扭矩转换,输入端连接电机,输出端连接机械臂。基于减速比的设计,减速器实现减速增扭,但由于减速器内部的摩擦、零部件间隙、装配的公差等影响,减速器的实际传动效率往往低于预期设计值,但偏差具体多大只能单独在相应的测试设备中进行测试以获取。但在将减速器装配于机器人后,往往会因为外接因素或装配误差等导致装配后仍存在偏差,导致机器人应用时存在输出力不足、或输入与输出不匹配的问题,影响机器人运动控制精度。
技术实现思路
1、本申请的目的在于提供一种谐波减速器及工业机器人,其能够在运行中实时反馈传动过程中的载荷变化,以辅助机器人运动控制系统作出误差修正,提高控制精度。
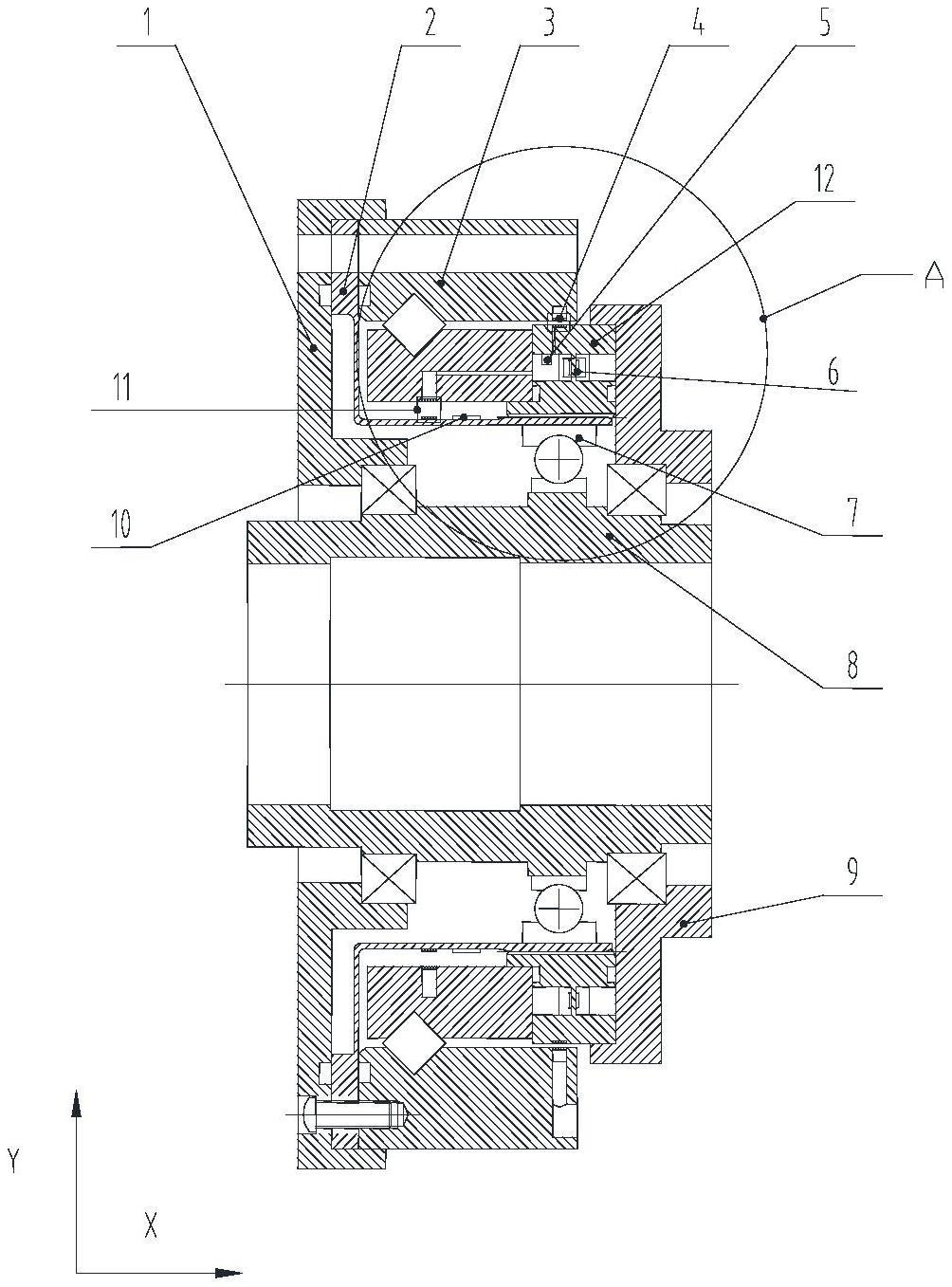
2、第一方面,本申请实施例提供了一种谐波减速器,该谐波减速器包括:
3、柔轮;
4、刚轮,与所述柔轮配合;
5、输入力检测模块,设置于所述柔轮,用于测得所述柔轮的第一载荷;
6、输出力检测模块,设置于所述刚轮,用于测得所述刚轮的第二载荷;
7、控制模块,根据所述第一载荷确定所述柔轮的输入力,以及根据所述第二载荷确定所述刚轮的输出力,以判断所述输入力和所述输出力之间的比值是否在阈值范围内。
8、在一种可能的实现方式中,所述控制模块包括,
9、无线模组,电连接所述输入力检测模块和所述输出力检测模块,用于获取所述第一载荷和所述第二载荷的力值信号;
10、采集生成模组,电连接所述无线模组,用于获取所述力值信号,并将所述力值信号转换以输出得到所述柔轮的输入力和所述刚轮的输出力。
11、在一种可能的实现方式中,还包括刚性轴承,所述刚性轴承将所述刚轮和所述柔轮连接,所述无线模组包括第一无线组和第二无线组,
12、所述第一无线组包括第一发送端和第一接收端,所述第一发送端设置于所述柔轮,所述第一接收端设置于所述刚性轴承,所述第一发送端与所述输入力检测模块电连接,所述第一接收端与所述采集生成模组电连接;
13、所述第二无线组包括第二发送端和第二接收端,所述第二发送端设置于所述刚轮,所述第二接收端设置于所述刚性轴承,所述第二发送端与所述输出力检测模块电连接,所述第二接收端与所述采集生成模组电连接。
14、在一种可能的实现方式中,所述刚性轴承具有内圈和外圈,所述内圈的内侧壁与所述柔轮的外侧壁相对,且分别设置有相对的第一凹陷部和第二凹陷部,所述第一接收端设置于所述第一凹陷部,所述第一发送端设置于所述第二凹陷部;
15、所述外圈的内侧壁与所述刚轮的外侧壁相对,且分别设置有相对的第三凹陷部和第四凹陷部,所述第二接收端设置于所述第三凹陷部,所述第二发送端设置于所述第四凹陷部。
16、在一种可能的实现方式中,所述输入力检测模块包括多个沿所述柔轮外侧壁周向均匀布置的第一应变片,多个所述第一应变片连接形成第一电桥组,所述第一电桥组与所述无线模组无线电连接。
17、在一种可能的实现方式中,所述输出力检测模块包括多个沿所述刚轮周向均匀布置的应变片组,多个所述应变片组连接形成第二电桥组,所述第二电桥组与所述无线模组无线电连接。
18、在一种可能的实现方式中,所述刚轮具有沿周向均匀布置的弹性梁,所述应变片组设置于所述弹性梁,
19、所述应变片组包括相背设置的第二应变片和第三应变片,沿所述刚轮轴向方向,所述第二应变片和所述第三应变片分别设置于所述弹性梁的两侧。
20、在一种可能的实现方式中,所述刚轮包括相互连接的第一本体和第二本体,所述第一本体设置为环形柱状结构,所述第二本体沿周向连接于所述第一本体的外侧壁,
21、所述第二本体设有多个沿周向布置且沿轴向方向贯穿的开槽,相邻的两个所述开槽之间的连接处形成所述弹性梁。
22、在一种可能的实现方式中,所述弹性梁在沿轴向方向的两端相对设置有第五凹陷部和第六凹陷部,所述第二应变片和所述第三应变片分别设置于所述第五凹陷部的底部和所述第六凹陷部的底部。
23、在一种可能的实现方式中,所述采集生成模组设置于所述第五凹陷部的侧壁或所述第六凹陷部的侧壁。
24、在一种可能的实现方式中,所述第二本体的外侧壁设有沿周向布置的第七凹陷部,所述第七凹陷部用于设置所述无线模组。
25、在一种可能的实现方式中,所述采集生成模组和所述无线模组通过引线连接,
26、所述第二本体设置有引线孔,所述第五凹陷部和所述第六凹陷部的一者通过所述引线孔与所述第四凹陷部连通,所述引线穿过所述引线孔连接所述采集生成模组和所述无线模组。
27、第二方面,本申请实施例还提供了一种工业机器人,包括:关节、机械臂以及位于关节与机械臂之间的减速器,其中,减速器为如前所述的任一种谐波减速器。
28、根据本申请实施例提供的谐波减速器及工业机器人,该谐波减速器通过分别设置于柔轮和刚轮上的输入力检测模块和输出力检测模块,以及将输入力检测模块和输出力检测模块电连接于控制模块,以无需将谐波减速器单独设置于检测设备中即可完成对谐波减速器的输入力、输出力检测。即在将谐波减速器装配于机器人后,通过上述所设置的各个模块,使得工业机器人能够随时获取谐波减速器的实际传动载荷,以得到实际力的反馈,以确定谐波减速器是否存在装配误差而导致的输出力不足、或输入与输出不匹配问题,从而实现在运行中实时反馈传动载荷,辅助机器人运动控制系统做出误差修正,提高控制精度。
技术特征:
1.一种谐波减速器,其特征在于,包括:
2.根据权利要求1所述的谐波减速器,其特征在于,所述控制模块包括,
3.根据权利要求2所述的谐波减速器,其特征在于,还包括刚性轴承,所述刚性轴承将所述刚轮和所述柔轮连接,所述无线模组包括第一无线组和第二无线组;
4.根据权利要求3所述的谐波减速器,其特征在于,所述刚性轴承具有内圈和外圈,所述内圈的内侧壁与所述柔轮的外侧壁相对,且分别设置有相对的第一凹陷部和第二凹陷部,所述第一接收端设置于所述第一凹陷部,所述第一发送端设置于所述第二凹陷部;
5.根据权利要求4所述的谐波减速器,其特征在于,所述输入力检测模块包括多个沿所述柔轮外侧壁周向均匀布置的第一应变片,多个所述第一应变片连接形成第一电桥组,所述第一电桥组与所述无线模组无线电连接。
6.根据权利要求4所述的谐波减速器,其特征在于,所述输出力检测模块包括多个沿所述刚轮周向均匀布置的应变片组,多个所述应变片组连接形成第二电桥组,所述第二电桥组与所述无线模组无线电连接。
7.根据权利要求6所述的谐波减速器,其特征在于,所述刚轮具有沿周向均匀布置的弹性梁,所述应变片组设置于所述弹性梁,
8.根据权利要求7所述的谐波减速器,其特征在于,所述刚轮包括相互连接的第一本体和第二本体,所述第一本体设置为环形柱状结构,所述第二本体沿周向连接于所述第一本体的外侧壁,
9.根据权利要求8所述的谐波减速器,其特征在于,所述弹性梁在沿所述轴向方向的两端相对设置有第五凹陷部和第六凹陷部,所述第二应变片和所述第三应变片分别设置于所述第五凹陷部的底部和所述第六凹陷部的底部。
10.根据权利要求9所述的谐波减速器,其特征在于,所述采集生成模组设置于所述第五凹陷部的侧壁或所述第六凹陷部的侧壁。
11.根据权利要求10所述的谐波减速器,其特征在于,所述第二本体的外侧壁设有沿周向布置的第七凹陷部,所述第七凹陷部用于设置所述无线模组。
12.根据权利要求11所述的谐波减速器,其特征在于,所述采集生成模组和所述无线模组通过引线连接,
13.一种工业机器人,其特征在于,包括:关节、机械臂以及位于所述关节与所述机械臂之间的减速器,其中,所述减速器为如权利要求1至12任一项所述的谐波减速器。
技术总结
本申请涉及一种谐波减速器及工业机器人,该谐波减速器包括:控制模块;柔轮;刚轮,与所述柔轮配合;输入力检测模块,设置于所述柔轮,用于测得所述柔轮的第一载荷;输出力检测模块,设置于所述刚轮,用于测得所述刚轮的第二载荷。该谐波减速器能够在运行中实时反馈传动过程中的载荷变化,以辅助机器人运动控制系统做出误差修正,提高控制精度。
技术研发人员:黄伟才,王拓,吴桐,李笋,周丹
受保护的技术使用者:珠海格力电器股份有限公司
技术研发日:20221027
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!