一种辅助测量工装机器人的制作方法
本技术属于管壁内径测量设备,尤其涉及一种辅助测量工装机器人。
背景技术:
1、对于一些内径精加工后的大型竖立管件,需要对其内径进行精确测量,由于此类管件只能垂直进行测量,传统的测量方法是通过施工吊篮将测量人员送入几十米高的管件内,然后手持内径千分尺由上至下逐步测量,但是由于因施工吊篮本身稳定性不是很好,测量人员在半空中也很难保持稳定,所以会造成测量的数据不准确,测量用时长效率低下,同时人工测量也存在安全隐患。
2、为了解决现有技术中存在的以上问题,我们提出一种辅助测量工装机器人。
技术实现思路
1、本实用新型的目的在于提供一种稳定性好,定心度高,测量数据准确的辅助测量工装机器人。
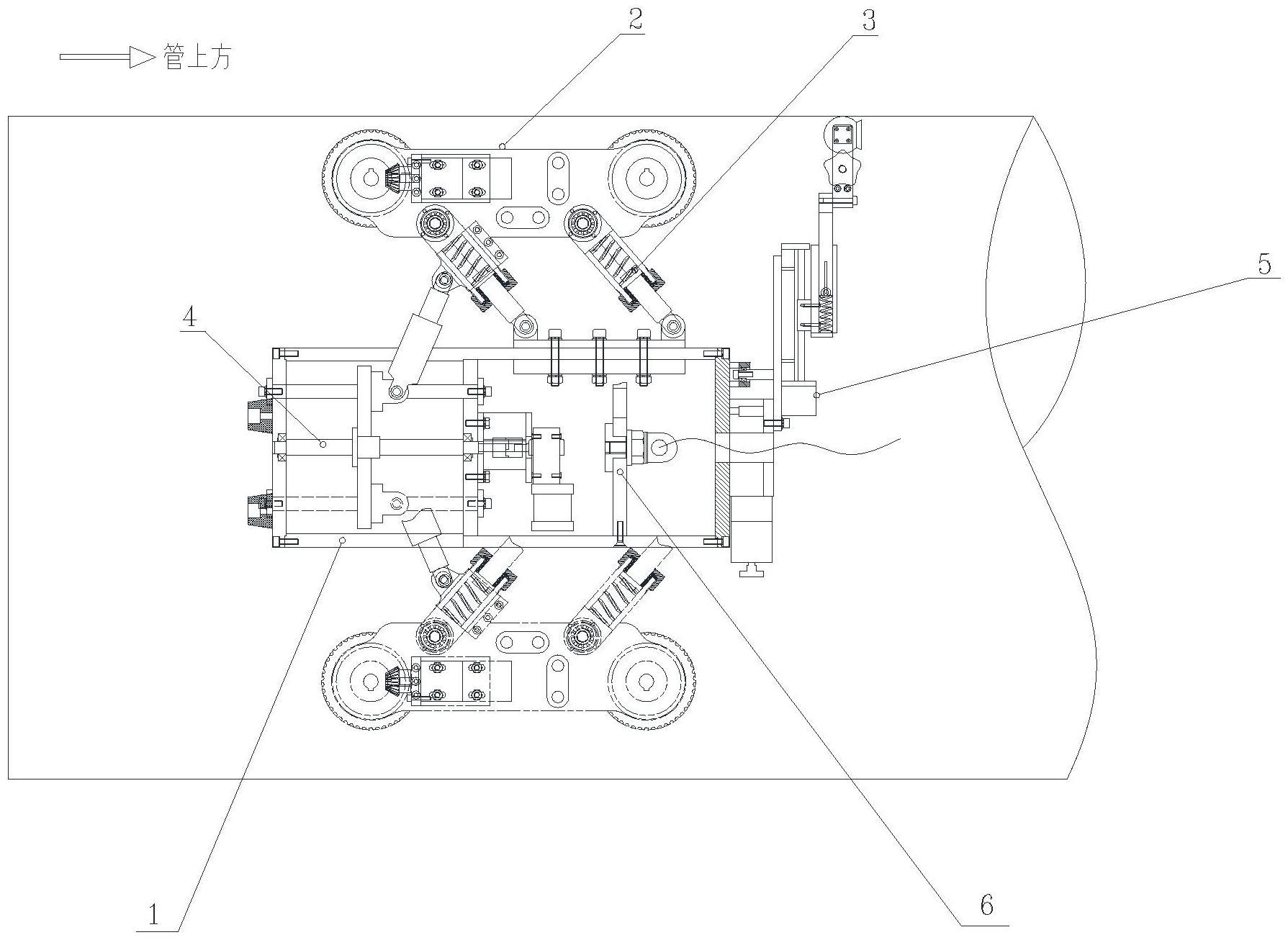
2、为实现上述目的,本实用新型提供如下技术方案:一种辅助测量工装机器人包括圆筒状的测量工装主体,环绕所述测量工装主体外壁等间距设置有3组工装行走机构,工装行走机构与测量工装主体之间通过2组平行设置的弹簧支臂连接,弹簧支臂与测量工装主体之间为销轴连接,还包括驱动所述弹簧支臂伸缩的弹簧支臂伸缩驱动机构;所述测量工装主体前端设置有测试球固定调节机构;所述工装行走机构包括固定安装板,固定安装板上安装有四个行走轮,以及驱动所述行走轮转动的行走驱动电机。
3、优选的,所述弹簧支臂伸缩驱动机构包括设置于所述测量工装主体内部的丝杠,丝杠上设置有丝母,丝母上设置有连接盘,连接盘边缘等间距设置有支臂连杆,支臂连杆与所述弹簧支臂连接,所述丝杠由丝杠电机驱动。
4、优选的,所述测试球固定调节机构包括电动旋转盘,电动旋转盘上水平设置有伸缩电机,伸缩电机的伸缩轴前端设置有测试球夹具。
5、优选的,所述测量工装主体上还设置有测量工装牵引保护机构。
6、优选的,所述测量工装主体上安装有测距传感器和位置传感器。
7、优选的,所述行走轮上安装有压力传感器。
8、优选的,所述行走轮为高摩擦橡胶材质。
9、与现有技术相比,本实用新型的有益效果是:
10、(1)三组工装行走机构通过可伸缩的弹簧支臂支撑在待测管件的内壁上,形成稳定的三角支撑机构,在行走及测量的过程中都可以保证稳定性。
11、(2)通过一套丝杠机构和连接盘同时带动三组工装行走机构的伸缩支撑,可保证工装机器人始终位于待测管件的中心,定心度好,保证了测量数据的准确性。
技术特征:
1.一种辅助测量工装机器人,其特征在于:包括圆筒状的测量工装主体(1),环绕所述测量工装主体(1)外壁等间距设置有3组工装行走机构(2),工装行走机构(2)与测量工装主体(1)之间通过2组平行设置的弹簧支臂(3)连接,弹簧支臂(3)与测量工装主体(1)之间为销轴连接,还包括驱动所述弹簧支臂(3)伸缩的弹簧支臂伸缩驱动机构(4);所述测量工装主体(1)前端设置有测试球固定调节机构(5);
2.根据权利要求1所述的一种辅助测量工装机器人,其特征在于:所述弹簧支臂伸缩驱动机构(4)包括设置于所述测量工装主体(1)内部的丝杠(41),丝杠(41)上设置有丝母(42),丝母(42)上设置有连接盘(43),连接盘(43)边缘等间距设置有支臂连杆(44),支臂连杆(44)与所述弹簧支臂(3)连接,所述丝杠(41)由丝杠电机驱动。
3.根据权利要求1所述的一种辅助测量工装机器人,其特征在于:所述测试球固定调节机构(5)包括电动旋转盘(51),电动旋转盘(51)上水平设置有伸缩电机(52),伸缩电机(52)的伸缩轴前端设置有测试球夹具(53)。
4.根据权利要求1所述的一种辅助测量工装机器人,其特征在于:所述测量工装主体(1)上还设置有测量工装牵引保护机构(6)。
5.根据权利要求1所述的一种辅助测量工装机器人,其特征在于:所述测量工装主体(1)上安装有测距传感器和位置传感器。
6.根据权利要求1所述的一种辅助测量工装机器人,其特征在于:所述行走轮(22)上安装有压力传感器。
7.根据权利要求1所述的一种辅助测量工装机器人,其特征在于:所述行走轮(22)为高摩擦橡胶材质。
技术总结
本技术公开了一种辅助测量工装机器人包括圆筒状的测量工装主体,环绕所述测量工装主体外壁等间距设置有3组工装行走机构,工装行走机构与测量工装主体之间通过2组平行设置的弹簧支臂连接,弹簧支臂与测量工装主体之间为销轴连接,还包括驱动所述弹簧支臂伸缩的弹簧支臂伸缩驱动机构;所述测量工装主体前端设置有测试球固定调节机构。本技术三组工装行走机构通过可伸缩的弹簧支臂支撑在待测管件的内壁上,在行走及测量的过程中都可以保证稳定性;通过一套丝杠机构和连接盘同时带动三组工装行走机构的伸缩支撑,可保证工装机器人始终位于待测管件的中心,定心度好,保证了测量数据的准确性。
技术研发人员:李扬
受保护的技术使用者:盘锦万扬科技有限公司
技术研发日:20221127
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!