一种可在异型管道爬行的智能柔性机器人的制作方法
本技术涉及管道设备维护保养领域,具体涉及一种可在异型管道爬行的智能柔性机器人。
背景技术:
1、市面上已有的爬行小车只能在内径比较规则的圆形管道内爬行,且无法进入较小口径的管道(内径小于100mm),当管道内部的直径发生变化时,爬行小车容易卡死或打滑,常规的管道大多为规则的圆形或方形,如图3所示,这种异型管道,内部工况复杂,内腔长宽忽大忽小,可能有凹坑或凸起,对于此种管道,普通的爬行小车遇到凸起或凹坑很容易卡死或打滑,此外,对于较深的(大于12米)管道,爬行小车进入管道往往需要拖行很长的线缆,线缆在管道内的摩擦力大大增加,而现有的小管径爬行小车常常因爬行拖行负载力不够而导致轮胎打滑或车体歪斜。
技术实现思路
1、本实用新型所要解决的技术问题是提供一种可在异型管道爬行的智能柔性机器人,以克服上述现有技术中的不足。
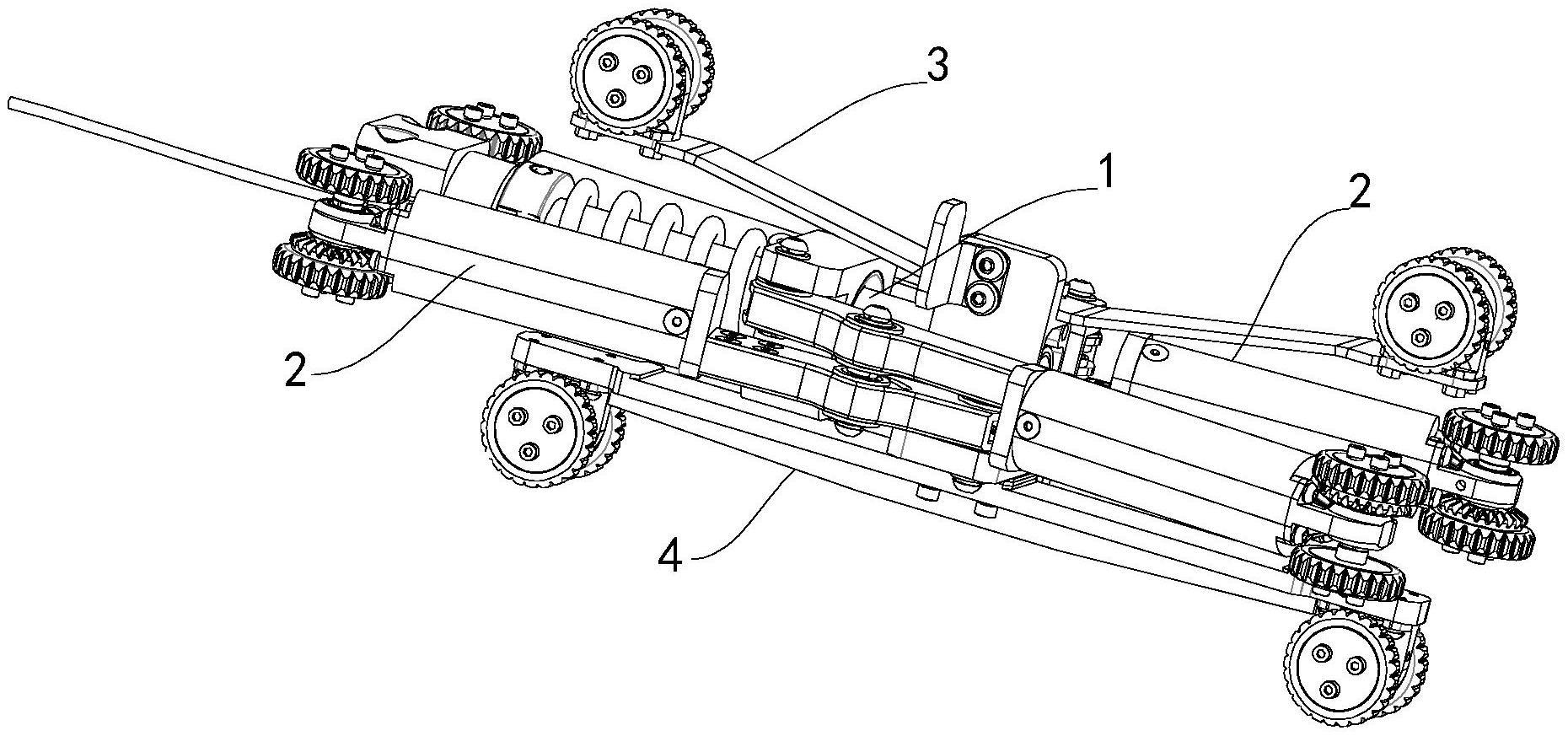
2、本实用新型解决上述技术问题的技术方案如下:一种可在异型管道爬行的智能柔性机器人,包括:机身、动力轮组、缓冲轮组和支撑轮组,机身的左右两侧对称设置动力轮组,机身的上方设置缓冲轮组,机身的下方设置支撑轮组。
3、本实用新型的有益效果是:针对所述异形管道,在机身四周设置动力轮组、缓冲轮组和支撑轮组,其中,两个动力轮组与异型管道内壁两侧接触并施加一定压力,提供机器人前后行走的动力,同时使机身能够稳定居中;支撑轮组为机器人提供纵向重力支撑,保证机器人在内部行走时机身的平稳性,异型管道中支撑轮组与下轨道接触并伴随机器人前后滚动;缓冲轮组与异型管道内上轨道接触,持续为机器人提供上下方向的张力,保证支撑轮组与下轨道的稳定接触,爬行过程中轴姿态稳定,使得机器人爬行稳定不卡死,可搭载清洗、除障、喷涂、雕刻、磨削等设备进入管道实施工作。
4、在上述技术方案的基础上,本实用新型还可以做如下改进。
5、进一步,动力轮组具有两个动力轮,并前后分布。
6、采用上述进一步的有益效果为:采用前后分布两个动力轮,当机器人爬行过程中,前轮遇到凹坑失去动力,后轮仍可持续提供前进动力,从而确保机器人始终能够在异型管道内爬行。
7、进一步,机身包括:中轴连杆、滑动座和弹簧,弹簧设置在中轴连杆上,滑动座活动套装在中轴连杆上,滑动座与弹簧的活动端相连,弹簧的压缩变形方向与滑动座在中轴连杆上的活动方向相同;
8、动力轮组包括:剪叉机构和两个动力轮,剪叉机构所具有的四个端部中的其中两个端部分别与滑动座和中轴连杆转动连接,另外两个端部分别与两个动力轮连接。
9、采用上述进一步的有益效果为:当异型管道内部尺寸变化时,通过弹簧可自适应调节动力轮组中剪叉机构的张开角度变化,具体为:弹簧可以对滑动座提供轴向的反作用力,该轴向的反作用力使剪叉机构的张开角度发生变化,使得安装于剪叉机构末端的动力轮拥有径向外力,该径向外力作用于管道内壁上为爬行提供摩擦力,防止动力轮工作时打滑,从而使得机器人可自适应管道内部的尺寸变化,如内径长宽变化,或内腔表面有一定范围内的凸面或凹坑,因此,机器人能放入标准或异形(长宽80-400mm)管道的爬行,此外,当两侧尺寸发生变化或有凸起时,弹簧也可以提供有效缓冲,防止机器人卡死。
10、进一步,还包括钢丝绳、拉环套和拉环,中轴连杆的尾端固定拉环套,两个动力轮组中位于后方的动力轮处均设置拉环,钢丝绳的一端与拉环相固定,另一端从拉环套侧边穿入,并绕螺丝销后由尾端穿出。
11、采用上述进一步的有益效果为:拖拽钢丝绳尾部,以使动力轮失去外张力,动力轮对管道内壁的摩擦力减小,使爬行机器人可顺利拖出管道,当机器人在管道内部保持一定的拖动负载能力的同时,能在机器人发生断电、故障、卡死等状况以及进入较深的管道作业时,能将机器人取出,避免担心机器人在管道内死机或者卡死时,从而适应于深度20米或以上的异形管道。
12、更进一步,两个动力轮组中位于后方的动力轮上的拉环所引出的钢丝绳在末端汇聚成一条。
13、采用上述进一步的有益效果为:在拖拽时可以保证两个动力轮组中位于后方的动力轮同时失去外张力,同步性好。
14、进一步,机身还包括:固定座和锁紧螺母,固定座固定设置于中轴连杆上,锁紧螺母螺纹连接在中轴连杆上,中轴连杆位于固定座与锁紧螺母之间的区段上活动套装滑动座,弹簧设置在滑动座与锁紧螺母之间。
15、采用上述进一步的有益效果为:拧动锁紧螺母,改变锁紧螺母在中轴连杆上的位置,以调节弹簧对滑动座的推力,从而提高剪叉机构的外张力。
16、进一步,剪叉机构包括:第一动力轮连杆和第二动力轮连杆,第一动力轮连杆的中部与第二动力轮连杆的中部通过旋转轴转动连接;第一动力轮连杆的一端与固定座通过旋转轴转动连接,另一端与一个动力轮相连;第二动力轮连杆的一端与滑动座通过旋转轴转动连接,另一端与一个动力轮相连。
17、进一步,动力轮包括:安装座、减速电机、传动链和动力滚轮,动力滚轮的旋转轴转动设置在安装座的端部,减速电机设置在安装座上,减速电机的主轴与动力滚轮的旋转轴通过传动链相连。
18、采用上述进一步的有益效果为:减速电机启动,减速电机将通过传动链驱使动力滚轮转动,以实现机器人在异型管道内行走,具备足够的动力,为爬行提供保证。
19、进一步,支撑轮组包括:支撑座和两个第一滚动轮组,支撑座的中部与机身相固定,两个第一滚动轮组分别设置在支撑座两端的下方,两个第一滚动轮组前后分布。
20、采用上述进一步的有益效果为:可以为机器人提供纵向重力支撑,保证机器人在内部行走时机身的平稳性,两个第一滚动轮组与管道接触并伴随机器人前后滚动。
21、进一步,缓冲轮组包括:弹簧片和两个第二滚动轮组,弹簧片的中部与机身相固定,弹簧片中间低两端向上弯折,两个第二滚动轮组分别设置在弹簧片两端的上方,两个第二滚动轮组前后分布。
22、采用上述进一步的有益效果为:缓冲轮组固定于爬行机器人的机身上侧,为机器人提供纵向缓冲和支撑,弹簧片上搭载的第二滚动轮组可在管道内自由滚动,当管道内部纵向变大或变小时,固定在弹簧片上的第二滚动轮组可随着弹簧片上下波动,为机器人纵向提供支撑,防止机器人在管道内部上下姿态倾斜。
技术特征:
1.一种可在异型管道爬行的智能柔性机器人,其特征在于,包括:机身(1)、动力轮组(2)、缓冲轮组(3)和支撑轮组(4),所述机身(1)的左右两侧对称设置动力轮组(2),所述机身(1)的上方设置缓冲轮组(3),所述机身(1)的下方设置支撑轮组(4)。
2.根据权利要求1所述的一种可在异型管道爬行的智能柔性机器人,其特征在于,所述动力轮组(2)具有两个动力轮(210),并前后分布。
3.根据权利要求2所述的一种可在异型管道爬行的智能柔性机器人,其特征在于,所述机身(1)包括:中轴连杆(110)、滑动座(120)和弹簧(140),所述弹簧(140)设置在所述中轴连杆(110)上,所述滑动座(120)活动套装在所述中轴连杆(110)上,所述滑动座(120)与所述弹簧(140)的活动端相连,所述弹簧(140)的压缩变形方向与所述滑动座(120)在中轴连杆(110)上的活动方向相同;
4.根据权利要求3所述的一种可在异型管道爬行的智能柔性机器人,其特征在于,还包括钢丝绳(5)、拉环套(6)和拉环(7),所述中轴连杆(110)的尾端固定拉环套(6),两个动力轮组(2)中位于后方的动力轮(210)处均设置拉环(7),所述钢丝绳(5)的一端与拉环(7)相固定,另一端从拉环套(6)侧边穿入,并绕螺丝销后由尾端穿出。
5.根据权利要求4所述的一种可在异型管道爬行的智能柔性机器人,其特征在于,两个动力轮组(2)中位于后方的动力轮(210)上的拉环(7)所引出的钢丝绳(5)在末端汇聚成一条。
6.根据权利要求3所述的一种可在异型管道爬行的智能柔性机器人,其特征在于,所述机身(1)还包括:固定座(130)和锁紧螺母(150),所述固定座(130)固定设置于所述中轴连杆(110)上,所述锁紧螺母(150)螺纹连接在所述中轴连杆(110)上,所述中轴连杆(110)位于固定座(130)与锁紧螺母(150)之间的区段上活动套装滑动座(120),所述弹簧(140)设置在所述滑动座(120)与锁紧螺母(150)之间。
7.根据权利要求6所述的一种可在异型管道爬行的智能柔性机器人,其特征在于,所述剪叉机构包括:第一动力轮连杆(220)和第二动力轮连杆(230),所述第一动力轮连杆(220)的中部与所述第二动力轮连杆(230)的中部通过旋转轴转动连接;所述第一动力轮连杆(220)的一端与所述固定座(130)通过旋转轴转动连接,另一端与一个动力轮(210)相连;所述第二动力轮连杆(230)的一端与所述滑动座(120)通过旋转轴转动连接,另一端与一个动力轮(210)相连。
8.根据权利要求2~7任一项所述的一种可在异型管道爬行的智能柔性机器人,其特征在于,所述动力轮(210)包括:安装座(211)、减速电机(212)、传动链(213)和动力滚轮(214),所述动力滚轮(214)的旋转轴转动设置在安装座(211)的端部,所述减速电机(212)设置在所述安装座(211)上,所述减速电机(212)的主轴与所述动力滚轮(214)的旋转轴通过传动链(213)相连。
9.根据权利要求1~7任一项所述的一种可在异型管道爬行的智能柔性机器人,其特征在于,所述支撑轮组(4)包括:支撑座(410)和两个第一滚动轮组(420),所述支撑座(410)的中部与所述机身(1)相固定,两个第一滚动轮组(420)分别设置在所述支撑座(410)两端的下方,两个第一滚动轮组(420)前后分布。
10.根据权利要求1~7任一项所述的一种可在异型管道爬行的智能柔性机器人,其特征在于,所述缓冲轮组(3)包括:弹簧片(310)和两个第二滚动轮组(320),所述弹簧片(310)的中部与所述机身(1)相固定,所述弹簧片(310)中间低两端向上弯折,两个第二滚动轮组(320)分别设置在所述弹簧片(310)两端的上方,两个第二滚动轮组(320)前后分布。
技术总结
本技术涉及一种可在异型管道爬行的智能柔性机器人,包括:机身、动力轮组、缓冲轮组和支撑轮组,机身的左右两侧对称设置动力轮组,机身的上方设置缓冲轮组,机身的下方设置支撑轮组。有益效果为:动力轮组与异型管道内壁两侧接触并施加一定压力,提供机器人前后行走的动力;支撑轮组为机器人提供纵向重力支撑,保证机器人在内部行走时机身的平稳性,异型管道中其与下轨道接触并伴随机器人前后滚动,缓冲轮组与异型管道内上轨道接触,持续为机器人提供上下方向的张力,保证支撑轮组与下轨道的稳定接触,爬行过程中轴姿态稳定,使得机器人爬行稳定不卡死,可搭载清洗、除障、喷涂、雕刻、磨削等设备进入管道实施工作。
技术研发人员:李震,周炜,王亦军,叶小威
受保护的技术使用者:宝宇(武汉)激光技术有限公司
技术研发日:20221129
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!