一种低水位暗涵内排污管排查履带式机器人的制作方法
本技术涉及一种低水位暗涵内排污管排查履带式机器人,属于市政环境工程。
背景技术:
1、暗涵内有刺激性气味,有毒气体不明;检测难度较大,安全隐患突出,作业人员的安全性得不到保障。
2、目前用于暗涵排查的机器人形式多种多样,搭载的传感器也逐渐丰富,可获取的暗涵内的信息越来越多,自动化程度越来越高,能够减少人员进入暗涵的频率,但还无法直接判断暗涵内排口是否排放的是污水,一般需要通过采样后在实验室内进行水质检测方能判断,而在暗涵内排口处取水样是极为困难的,通常需要人员佩戴防毒面具等进入暗涵内部进行采样,因此不能根本上解决暗涵排查的人员安全性问题。
3、亟待寻找一种能够在在无人的条件下进入低水位、有淤泥的市政暗涵内进行排污管排查,保障工作人员的安全,并且在不进行水质检测的条件下,判断市政暗涵内排放口中排出的水流是否为污水的机器人。
技术实现思路
1、为了解决现有技术的不足,本实用新型提供了一种低水位暗涵内排污管排查履带式机器人,通过搭载红外摄像头和热成像摄像头实现对排放口管径、位置、高度等基本信息的获取,还能在排查过程中实时判断排放口的类型,即雨水管或污水管,不用在排查时利用人工对每个排放口进行水质采样。
2、本实用新型为解决其技术问题所采用的技术方案是:提供了一种低水位暗涵内排污管排查履带式机器人,包括履带式车体,履带式车体包括壳体和位于壳体两侧的由车轮和覆盖车轮的履带组成的履带走行机构,壳体顶部设有固定支架,固定支架包括底架和位于底架前部的立架,立架前侧安装有断面扫描激光雷达,底架上从前至后依次安装有控制箱和一体式旋转摄像头,控制箱中设有电性连接的微型计算机和交换机,壳体的后侧设有控制面板,控制面板布置有与微型计算机电性连接的线缆接线口,断面扫描激光雷达和一体式旋转摄像头均与微型计算机电性连接。
3、一体式旋转摄像头包括摄像头底座和通过旋转电机安装于摄像头底座的一体式摄像头,一体式摄像头集成有热成像摄像头和红外夜视摄像头。
4、笔记本电脑通过线缆接线口与交换机电性连接。
5、控制面板上设有与微型计算机电性连接的电源开关。
6、控制面板上设有与微型计算机电性连接的电源显示屏。
7、控制面板上设有与微型计算机电性连接的强制关机按钮。
8、控制箱中设有与微型计算机电性连接的蓝牙传输模块,操作手柄通过蓝牙模式与微型计算机通信。
9、本实用新型基于其技术方案所具有的有益效果在于:
10、(1)本实用新型提供的一种低水位暗涵内排污管排查履带式机器人采用履带式走行方式,结构和走行稳定,适合水位低的暗涵;
11、(2)本实用新型提供的一种低水位暗涵内排污管排查履带式机器人通过搭载红外摄像头和热成像摄像头,使履带式机器人在进行暗涵排查时,除了获取排放口管径、位置、高度等基本信息外,还能在排查过程中实时判断排放口的类型,即雨水管或污水管,不用在排查时利用人工对每个排放口进行水质采样;
12、(3)本实用新型提供的一种低水位暗涵内排污管排查履带式机器人可通过线缆接口线与笔记本电脑连接,将断面扫描激光雷达获取的三维点云数据传输至笔记本电脑中,通过目前成熟的三维点云识别算法,识别出暗涵三维点云中的圆形空洞的直径、位置、高度等空间信息,不必对三维点云进行三维重构,节省了大量工作量。
技术特征:
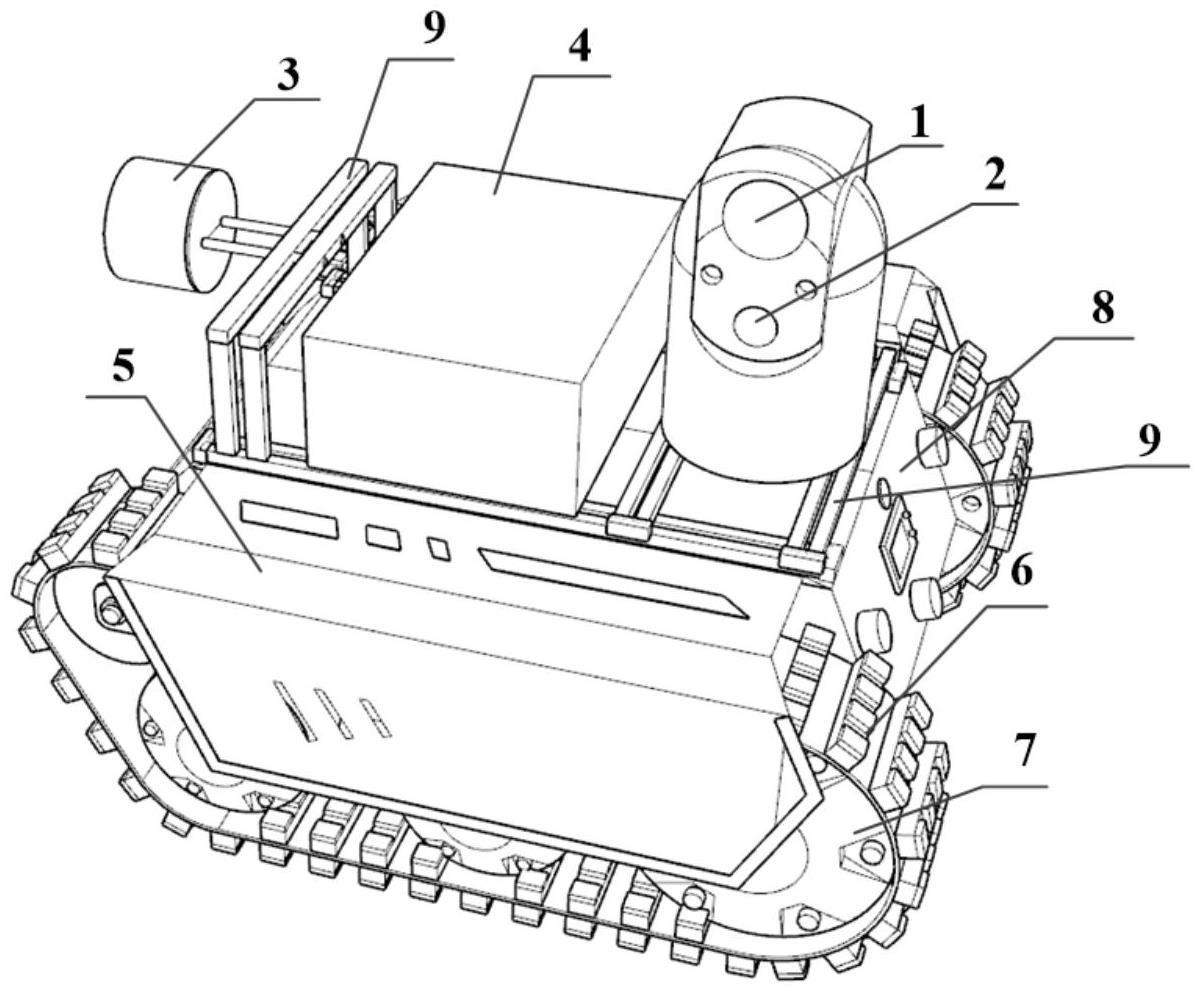
1.一种低水位暗涵内排污管排查履带式机器人,包括履带式车体,履带式车体包括壳体(5)和位于壳体两侧的由车轮(7)和覆盖车轮的履带(6)组成的履带走行机构,其特征在于:壳体顶部设有固定支架(9),固定支架包括底架和位于底架前部的立架,立架前侧安装有断面扫描激光雷达(3),底架上从前至后依次安装有控制箱(4)和一体式旋转摄像头,控制箱中设有电性连接的微型计算机和交换机,壳体的后侧设有控制面板(8),控制面板布置有与微型计算机电性连接的线缆接线口(11),断面扫描激光雷达和一体式旋转摄像头均与微型计算机电性连接。
2.根据权利要求1所述的低水位暗涵内排污管排查履带式机器人,其特征在于:一体式旋转摄像头包括摄像头底座和通过旋转电机安装于摄像头底座的一体式摄像头,一体式摄像头集成有热成像摄像头(1)和红外夜视摄像头(2)。
3.根据权利要求1所述的低水位暗涵内排污管排查履带式机器人,其特征在于:笔记本电脑通过线缆接线口与交换机电性连接。
4.根据权利要求1所述的低水位暗涵内排污管排查履带式机器人,其特征在于:控制面板上设有与微型计算机电性连接的电源开关(10)。
5.根据权利要求1所述的低水位暗涵内排污管排查履带式机器人,其特征在于:控制面板上设有与微型计算机电性连接的电源显示屏(12)。
6.根据权利要求1所述的低水位暗涵内排污管排查履带式机器人,其特征在于:控制面板上设有与微型计算机电性连接的强制关机按钮(13)。
7.根据权利要求1所述的低水位暗涵内排污管排查履带式机器人,其特征在于:控制箱中设有与微型计算机电性连接的蓝牙传输模块,操作手柄通过蓝牙模式与微型计算机通信。
技术总结
本技术提供了一种低水位暗涵内排污管排查履带式机器人,包括履带式车体,履带式车体包括壳体和履带走行机构,壳体顶部设有固定支架,固定支架的立架前侧安装有断面扫描激光雷达,底架上从前至后依次安装有控制箱和一体式旋转摄像头,控制箱中设有电性连接的微型计算机和交换机,壳体的后侧设有控制面板,控制面板布置有与微型计算机电性连接的线缆接线口,断面扫描激光雷达和一体式旋转摄像头均与微型计算机电性连接。本技术通过搭载红外摄像头和热成像摄像头实现对排放口管径、位置、高度等基本信息的获取,还能在排查过程中实时判断排放口的类型,即雨水管或污水管,不用在排查时利用人工对每个排放口进行水质采样。
技术研发人员:姬亚朋,吴平生,王庆,肖楚杭,徐瓒,姚明,叶旺,李关林,行航
受保护的技术使用者:中电建水环境科技有限公司
技术研发日:20221219
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!