一种用于平板便携站的双电机联动伺服系统的制作方法
本发明涉及平板便携站领域,具体是涉及一种用于平板便携站的双电机联动伺服系统。
背景技术:
1、对于平板便携站,设计时除天线电性能指标外,还需考虑对星方式、整机尺寸、整机重量、整机功耗等因素,以满足方便好用的实际需求。现有的平板便携站主要有手动对星和单轴自动对星两大类,手动对星存在精度不高、速度慢、操作复杂等缺点,单轴自动对星因各轴分开控制输出,存在功耗大、尺寸大等缺点,极大的影响了便携站的运输便捷性和工作时长。
技术实现思路
1、基于此,有必要针对现有技术问题,提供一种用于平板便携站的双电机联动伺服系统,解决现有的平板便携站主要有手动对星和单轴自动对星两大类,手动对星存在精度不高、速度慢、操作复杂等缺点。
2、为解决现有技术问题,本发明采用的技术方案为:
3、本发明提供了一种用于平板便携站的双电机联动伺服系统,包括有天馈系统、伺服系统和固定支架,伺服系统包括有机构固定底板、伺服机构和主控单元模块;主控单元模块固定安装在机构固定底板上,主控单元模块与伺服机构电连接;伺服机构包括有第一伺服电机、第二伺服电机、齿轮传动组件、位移检测组件和电机固定支架,齿轮传动组件包括有分别对向设置的第一圆锥齿轮和第二圆锥齿轮,以及分别与第一圆锥齿轮和第二圆锥齿轮均啮合的第三圆锥齿轮,第一圆锥齿轮和第二圆锥齿轮共线,第三圆锥齿轮的轴线与第一圆锥齿轮的轴线垂直,第一伺服电机与第一圆锥齿轮传动连接,第二伺服电机与第二圆锥齿轮传动连接,第一伺服电机和第二伺服电机分别用于控制第一圆锥齿轮和第二圆锥齿轮高精度旋转或精准刹车,第一伺服电机和第二伺服电机均通过电机固定支架与机构固定底板固定连接,位移检测组件设置在第一圆锥齿轮和第二圆锥齿轮之间。
4、优选的,第一圆锥齿轮、第二圆锥齿轮和第三圆锥齿轮的模数均相同,第一圆锥齿轮与第二圆锥齿轮的齿数也相同且均与第三圆锥齿轮分度圆啮合。
5、优选的,伺服机构还包括有旋转支撑装置、传感检测装置和传感器固定支架,传感器固定支架与旋转支撑装置传动连接,传感检测装置设置在传感器固定支架上。
6、优选的,旋转支撑装置包括有俯仰角接触轴承组、俯仰旋转中心轴、方位角接触轴承组和方位旋转中心轴,俯仰旋转中心轴通过俯仰角接触轴承组能够转动的设置在第一伺服电机和第二伺服电机之间,方位旋转中心轴通过方位角接触轴承组能够旋转的设置在第三圆锥齿轮上,第三圆锥齿轮与固定支架连接,俯仰旋转中心轴和方位旋转中心轴相对固定连接,传感器固定支架固定安装在俯仰旋转中心轴上。
7、优选的,传感检测装置包括有第一位置传感器、第二位置传感器、第三位置传感器、第四位置传感器、两个俯仰传感器感应柱和一个方位传感器感应柱,对应的两个俯仰传感器感应柱分别固定在左右布置的两个电机固定支架上,两个俯仰传感器感应柱角度相差九十度,第三位置传感器和第四位置传感器与两个俯仰传感器感应柱同角度对称布置,方位传感器感应柱固定在第三圆锥齿轮上,第一位置传感器和第二位置传感器对称一百八十度设置。
8、通过在实际工作中通过触发第三位置传感器和第四位置传感器来限制天馈系统的俯仰角度范围。在实际工作通过触发感应柱来限制天馈系统的方位角度范围。
9、优选的,伺服电机由第一编码器、刹车、第一电机和减速箱组成。
10、优选的,伺服电机由第二编码器、刹车、第二电机和减速箱组成。
11、优选的,伺服系统还包括有齿轮防护罩和机构防护外罩,齿轮防护罩套设在第一圆锥齿轮、第二圆锥齿轮和第三圆锥齿轮的外侧,机构防护外罩套设在伺服机构的外侧,机构防护外罩固定安装在机构固定底板上。
12、优选的,齿轮防护罩包括有齿轮防护外罩和齿轮防护内罩,齿轮防护外罩和齿轮防护内罩同轴设置,齿轮防护内罩固定安装在第三圆锥齿轮上。
13、优选的,机构防护外罩上设有供齿轮防护外罩位移的限位滑槽。
14、本发明相比较于现有技术的有益效果是:
15、1、采用双电机联动原理,通过调节两个电机的相对旋向来控制系统的实际输出轴及方向。
16、2、双电机采用同步定轴公转和同轴自转的运行机制,保证扭矩的持续输出性及换向平滑度。
17、3、双电机采用单cpu控制两个驱动芯片同步输出脉冲,利用脉冲的方向来确定电机的旋向,进而根据两个电机旋向是否相同来决定机构的动作。
18、4、利用减速电机的刹车功能,当完成寻星动作后刹车介入,电机断电保持,节约电能,提高工作时长。
19、5、在方位和俯仰方向上均为双电机同时输出扭矩,理论上只需要选择计算转矩一半的电机,极大的减小了电机功率要求,降低了整机的功耗。
技术特征:
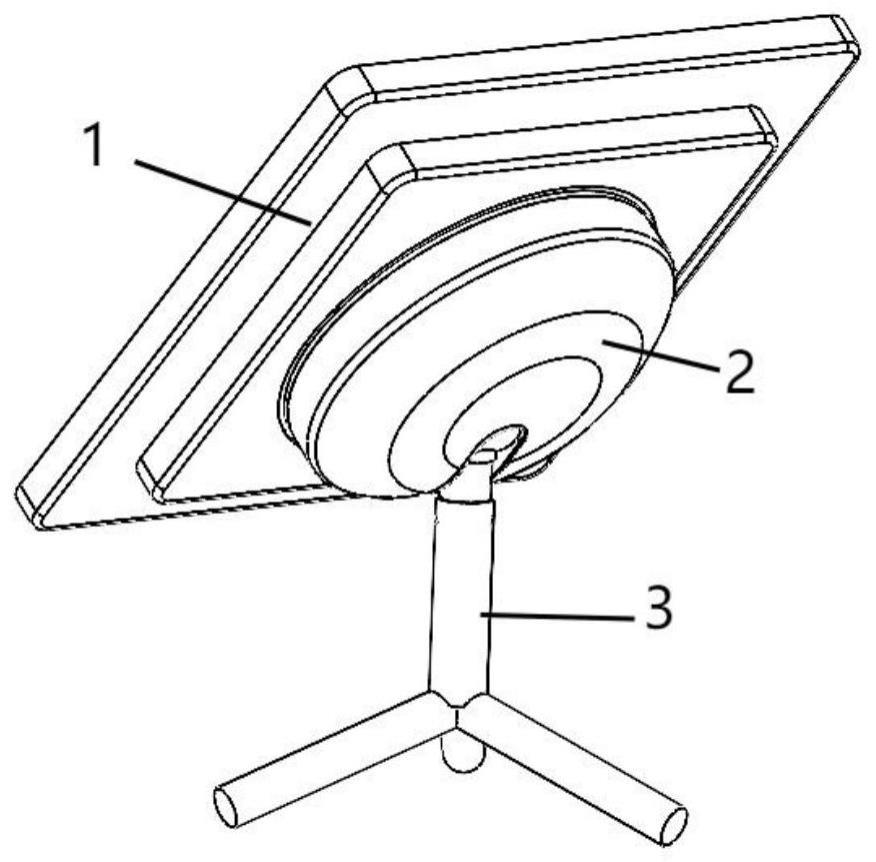
1.一种用于平板便携站的双电机联动伺服系统,包括有天馈系统(1)、伺服系统(2)和固定支架(3),其特征在于,伺服系统(2)包括有机构固定底板(21)、伺服机构(22)和主控单元模块(26);
2.根据权利要求1所述的一种用于平板便携站的双电机联动伺服系统,其特征在于,第一圆锥齿轮(2207)、第二圆锥齿轮(2215)和第三圆锥齿轮(2221)的模数均相同,第一圆锥齿轮(2207)与第二圆锥齿轮(2215)的齿数也相同且均与第三圆锥齿轮(2221)分度圆啮合。
3.根据权利要求2所述的一种用于平板便携站的双电机联动伺服系统,其特征在于,伺服机构(22)还包括有旋转支撑装置、传感检测装置和传感器固定支架(2210),传感器固定支架(2210)与旋转支撑装置传动连接,传感检测装置设置在传感器固定支架(2210)上。
4.根据权利要求3所述的一种用于平板便携站的双电机联动伺服系统,其特征在于,旋转支撑装置包括有俯仰角接触轴承组(2208)、俯仰旋转中心轴(2216)、方位角接触轴承组(2218)和方位旋转中心轴(2219),俯仰旋转中心轴(2216)通过俯仰角接触轴承组(2208)能够转动的设置在第一伺服电机(221)和第二伺服电机(222)之间,方位旋转中心轴(2219)通过方位角接触轴承组(2218)能够旋转的设置在第三圆锥齿轮(2221)上,第三圆锥齿轮(2221)与固定支架(3)连接,俯仰旋转中心轴(2216)和方位旋转中心轴(2219)相对固定连接,传感器固定支架(2210)固定安装在俯仰旋转中心轴(2216)上。
5.根据权利要求4所述的一种用于平板便携站的双电机联动伺服系统,其特征在于,传感检测装置包括有第一位置传感器(2211)、第二位置传感器(2220)、第三位置传感器(2209)、第四位置传感器(2212)、两个俯仰传感器感应柱(2206)和一个方位传感器感应柱(2217),对应的两个俯仰传感器感应柱(2206)分别固定在左右布置的两个电机固定支架(2205)上,两个俯仰传感器感应柱(2206)角度相差九十度,第三位置传感器(2209)和第四位置传感器(2212)与两个俯仰传感器感应柱(2206)同角度对称布置,方位传感器感应柱(2217)固定在第三圆锥齿轮(2221)上,第一位置传感器(2211)和第二位置传感器(2220)对称一百八十度设置。
6.根据权利要求1所述的一种用于平板便携站的双电机联动伺服系统,其特征在于,伺服电机由第一编码器(2201)、刹车(2202)、第一电机(2203)和减速箱(2204)组成。
7.根据权利要求6所述的一种用于平板便携站的双电机联动伺服系统,其特征在于,伺服电机由第二编码器(2214)、刹车(2202)、第二电机(2213)和减速箱(2204)组成。
8.根据权利要求1所述的一种用于平板便携站的双电机联动伺服系统,其特征在于,伺服系统(2)还包括有齿轮防护罩和机构防护外罩(25),齿轮防护罩套设在第一圆锥齿轮(2207)、第二圆锥齿轮(2215)和第三圆锥齿轮(2221)的外侧,机构防护外罩(25)套设在伺服机构(22)的外侧,机构防护外罩(25)固定安装在机构固定底板(21)上。
9.根据权利要求8所述的一种用于平板便携站的双电机联动伺服系统,其特征在于,齿轮防护罩包括有齿轮防护外罩(23)和齿轮防护内罩(24),齿轮防护外罩(23)和齿轮防护内罩(24)同轴设置,齿轮防护内罩(24)固定安装在第三圆锥齿轮(2221)上。
10.根据权利要求9所述的一种用于平板便携站的双电机联动伺服系统,其特征在于,机构防护外罩(25)上设有供齿轮防护外罩(23)位移的限位滑槽。
技术总结
本发明涉及一种用于平板便携站的双电机联动伺服系统,包括有天馈系统、伺服系统和固定支架,伺服系统包括有机构固定底板、伺服机构和主控单元模块;伺服机构包括有第一伺服电机、第二伺服电机、齿轮传动组件、位移检测组件和电机固定支架,齿轮传动组件包括有分别对向设置的第一圆锥齿轮和第二圆锥齿轮,以及分别与第一圆锥齿轮和第二圆锥齿轮均啮合的第三圆锥齿轮,位移检测组件设置在第一圆锥齿轮和第二圆锥齿轮之间。采用双电机联动原理,双电机采用同步定轴公转和同轴自转的运行机制,在方位和俯仰方向上均为双电机同时输出扭矩,理论上只需要选择计算转矩一半的电机,极大的减小了电机功率要求,降低了整机的功耗。
技术研发人员:蔡金平,王帅,杨淳雯
受保护的技术使用者:迪泰(浙江)通信技术有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!