一种机器人的制作方法
本发明涉及机器人,特别是涉及一种机器人。
背景技术:
1、现有的管道内自主运行的管道机器人大多采用被动支撑式机构,通过多组弹簧驱动的支撑机构,其驱动轮与管道内壁相接触,在管道检测机器人驱动轮出现故障后,支撑式机构无法主动抬起使驱动轮与管道内壁拖离接触,导致机器人卡滞在管道内部;管道检测机器人的驱动轮遇到凸起障碍物时,无法越障,导致机器人卡滞在管道内部,给管道检测工作带来严重阻碍。
技术实现思路
1、本发明的目的在于提供一种机器人,用于解决遇到凸起障碍物无法越障的技术问题。
2、为了实现上述目的,本发明提供如下技术方案:
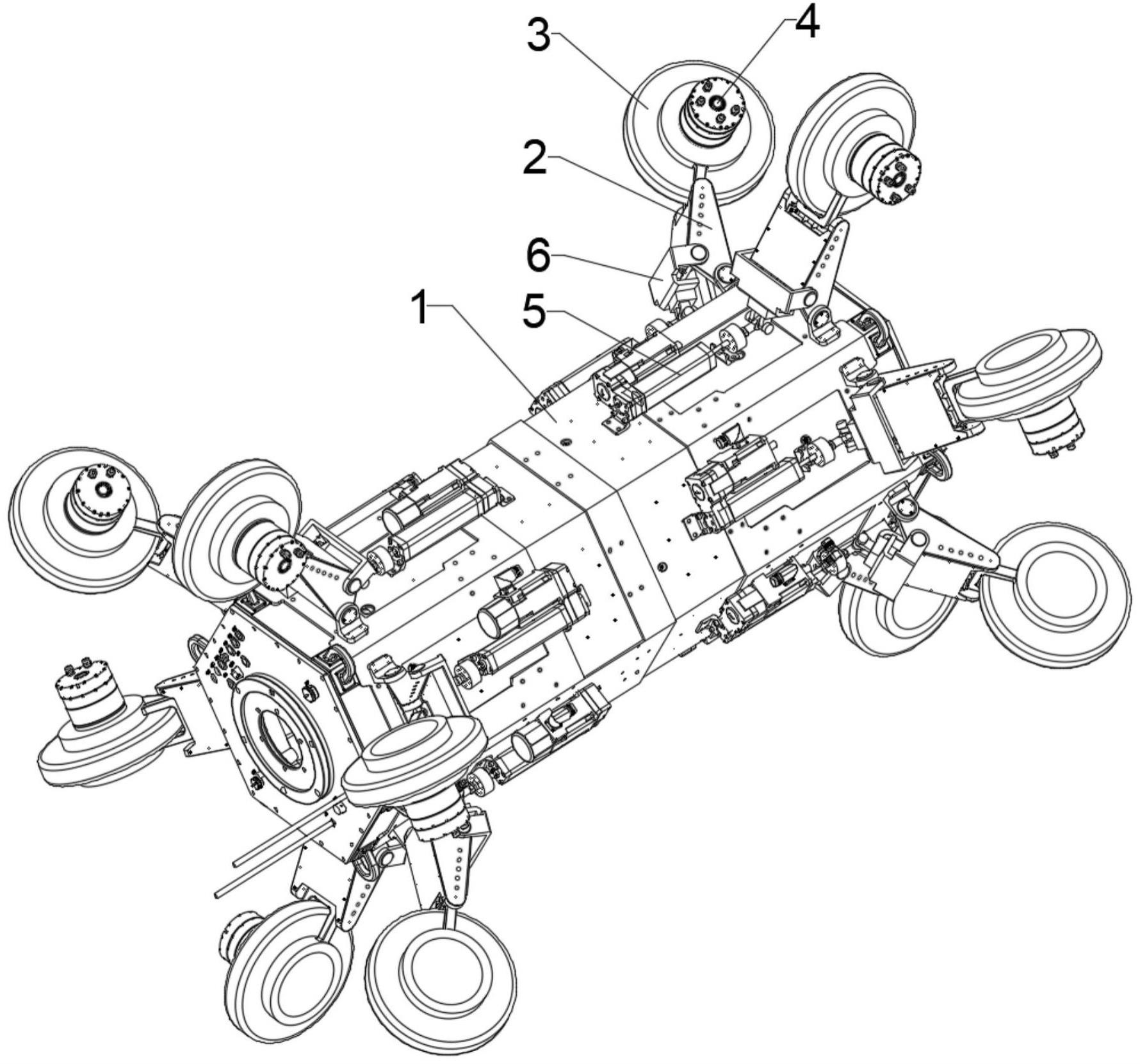
3、一种机器人,包括舱体以及至少一组沿所述舱体周向对称设置的行走支撑机构,所述行走支撑机构用于与管道的内壁面接触并驱动所述舱体在所述管道内移动;每个所述行走支撑机构包括基座部以及设在所述基座部的驱动轮,所述驱动轮通过被动调节组件可往复移动地连接于所述基座部;所述基座部背离所述驱动轮的端部铰接于所述舱体的外壁;所述机器人还包括驱动所述基座部转动的驱动组件,所述驱动组件一端连接于所述舱体,另一端通过连接部铰接于所述基座部。
4、优选地,所述机器人还包括电机,所述电机的输入轴与所述驱动轮的转轴传动连接。
5、优选地,所述驱动组件包括设在所述舱体的直线驱动机构,所述连接部的一端铰接于所述基座部,另一端与所述直线驱动机构的伸缩端铰接。
6、优选地,所述直线驱动机构为电动缸、液压缸、汽缸中的一种。
7、优选地,所述被动调节组件包括至少一个弹簧、以及滑动设在所述基座部的滑块,所述滑块的一侧通过所述弹簧与所述基座部靠近所述舱体的端部连接,所述滑块相对的另一侧与所述驱动轮所具有的支架连接。
8、优选地,所述基座部为u型槽结构,所述被动调节组件设在所述u型槽中,所述基座部的两个侧壁的内壁面分别设有线性导轨,每个所述线性导轨与所述滑块的相应端部配合,所述线性导轨的长度方向为所述弹簧的伸缩方向。
9、优选地,所述滑块包括第一支撑杆,所述第一支撑杆两端连接的的两个滑动部分别匹配于两个所述线性导轨,所述第一支撑杆的轴向与所述线性导轨的长度方向相互垂直,所述基座部两个侧壁的内壁面之间固定有第二支撑杆,每个所述弹簧内设有伸缩导杆,所述伸缩导杆具有与所述弹簧两端相抵接的两个头部,其中一个所述头部转动连接于所述第一支撑杆,另一个所述头部转动连接于所述第二支撑杆。
10、优选地,所述机器人还包括控制器,所述直线驱动机构的伸缩端与所述连接部之间还设有力传感器,所述控制器与所述直线驱动机构、所述力传感器通信连接,当所述力传感器的压力值大于预设阈值,所述控制器用于控制所述直线驱动机构动作。
11、优选地,所述机器人还包括设在所述舱体的倾角传感器,所述控制器用于基于所述倾角传感器的倾角调节所述驱动轮的速度。
12、优选地,所述行走支撑机构为两组,两组所述行走支撑机构分别设在所述舱体靠近相应端部的部位;和/或,每组所述行走支撑机构的数量为六个。
13、与现有技术相比,本发明提供的机器人具有如下有益效果。
14、1、除了设置有被动调节组件之外,还设置有主动调节组件,也即是可通过驱动组件驱动基座部转动,进而主动调节驱动轮的位置,对驱动轮进行主动缩回或主动伸出的动作,当机器人遇到凸起障碍物时,驱动组件带动驱动轮缩回,缩小驱动轮与舱体中心轴之间的距离,使驱动轮收拢从而使驱动轮与管道内壁脱离接触,使得机器人能够跨越凸起障碍物;通过上述动作,本发明提供的机器人可大幅提高机器人的越障能力,有效避免机器人因为凸起障碍物卡滞在管道内部,保证管道检测工作顺利完成。
15、2、当机器人的被动调节组件出现故障时,现有技术的机器人,即使是平坦的管道内壁,驱动轮也会与管道内壁脱离,不能驱动机器人行走;但是,本发明设置的驱动组件可带动驱动轮张开,进而与管道内壁接触,驱动机器人行走,本发明公开的机器人在被动调节组件出现故障时仍然能继续工作,具有更高的可靠性。
16、3、当机器人的驱动轮出现故障而无法正常转动时,驱动组件可带动驱动轮收拢,进而与管道内壁脱离,其余驱动轮继续驱动机器人行走,使得机器人在某一些驱动轮出现故障时仍然能继续工作,进一步提高了可靠性。
17、4、当机器人的不超过特定数量的行走支撑机构出现故障的情况下,可主动通过驱动组件带动驱动轮收拢,从而使驱动轮与管道内壁脱离接触,在其余行走支撑机构带动下继续作业,具备较强的冗余运动能力。
技术特征:
1.一种机器人,其特征在于,包括舱体以及至少一组沿所述舱体周向对称设置的行走支撑机构,所述行走支撑机构用于与管道的内壁面接触并驱动所述舱体在所述管道内移动;
2.根据权利要求1所述的机器人,其特征在于,所述机器人还包括电机,所述电机的输入轴与所述驱动轮的转轴传动连接。
3.根据权利要求1所述的机器人,其特征在于,所述驱动组件包括设在所述舱体的直线驱动机构,所述连接部的一端铰接于所述基座部,另一端与所述直线驱动机构的伸缩端铰接。
4.根据权利要求3所述的机器人,其特征在于,所述直线驱动机构为电动缸、液压缸、汽缸中的一种。
5.根据权利要求1所述的机器人,其特征在于,所述被动调节组件包括至少一个弹簧、以及滑动设在所述基座部的滑块,所述滑块的一侧通过所述弹簧与所述基座部靠近所述舱体的端部连接,所述滑块相对的另一侧与所述驱动轮所具有的支架连接。
6.根据权利要求5所述的机器人,其特征在于,所述基座部为u型槽结构,所述被动调节组件设在所述u型槽中,所述基座部的两个侧壁的内壁面分别设有线性导轨,每个所述线性导轨与所述滑块的相应端部配合,所述线性导轨的长度方向为所述弹簧的伸缩方向。
7.根据权利要求6所述的机器人,其特征在于,所述滑块包括第一支撑杆,所述第一支撑杆两端连接的的两个滑动部分别匹配于两个所述线性导轨,所述第一支撑杆的轴向与所述线性导轨的长度方向相互垂直,所述基座部两个侧壁的内壁面之间固定有第二支撑杆,
8.根据权利要求3所述的机器人,其特征在于,所述机器人还包括控制器,所述直线驱动机构的伸缩端与所述连接部之间还设有力传感器,所述控制器与所述直线驱动机构、所述力传感器通信连接,当所述力传感器的压力值大于预设阈值,所述控制器用于控制所述直线驱动机构动作。
9.根据权利要求8所述的机器人,其特征在于,所述机器人还包括设在所述舱体的倾角传感器,所述控制器用于基于所述倾角传感器的倾角调节所述驱动轮的速度。
10.根据权利要求1所述的机器人,其特征在于,所述行走支撑机构为两组,两组所述行走支撑机构分别设在所述舱体靠近相应端部的部位;和/或,
技术总结
本发明涉及一种机器人,属于机器人技术领域,包括舱体以及至少一组沿舱体周向对称设置的行走支撑机构,行走支撑机构用于与管道的内壁面接触并驱动舱体在管道内移动;每个行走支撑机构包括基座部以及设在基座部的驱动轮,驱动轮通过被动调节组件可往复移动地连接于基座部;基座部背离驱动轮的端部铰接于舱体的外壁;机器人还包括驱动基座部转动的驱动组件,驱动组件一端连接于舱体,另一端通过连接部铰接于基座部。本发明的有益效果是:大幅提高机器人的越障能力,有效避免机器人因为凸起障碍物卡滞在管道内部,保证管道检测工作顺利完成;机器人在被动调节组件或驱动轮出现故障时仍然能继续工作,具有更高的可靠性,具备较强的冗余运动能力。
技术研发人员:沈志航,吴墉,李硕,杨中亚,赵胜利,徐洋洋,王飞宇,孙海铭
受保护的技术使用者:航天科工智能机器人有限责任公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!