一种用于机器人的内啮合齿轮减速机的制作方法
本发明涉及齿轮减速机,具体为一种用于机器人的内啮合齿轮减速机。
背景技术:
1、齿轮减速箱是按照原动机连接减速箱,减速箱再连接工作机的原理来进行工作的,是一种动力传达设备。在机器人领域中,为了避免电机直接带动负载,保护电机,通常在电机的输出轴上连接齿轮减速机,通过不同大小的齿轮啮合,使得电机的传动比改变,从而提高扭矩,而现有齿轮减速机不能自行改变传动动比,齿轮啮合的方式只有一种,即固定模式,为此,我们提出一种用于机器人的内啮合齿轮减速机。
技术实现思路
1、针对现有齿轮减速机的不足,本发明提供了一种用于机器人的内啮合齿轮减速机,具备改变传动比的优点,解决了上述背景技术中提出的问题。
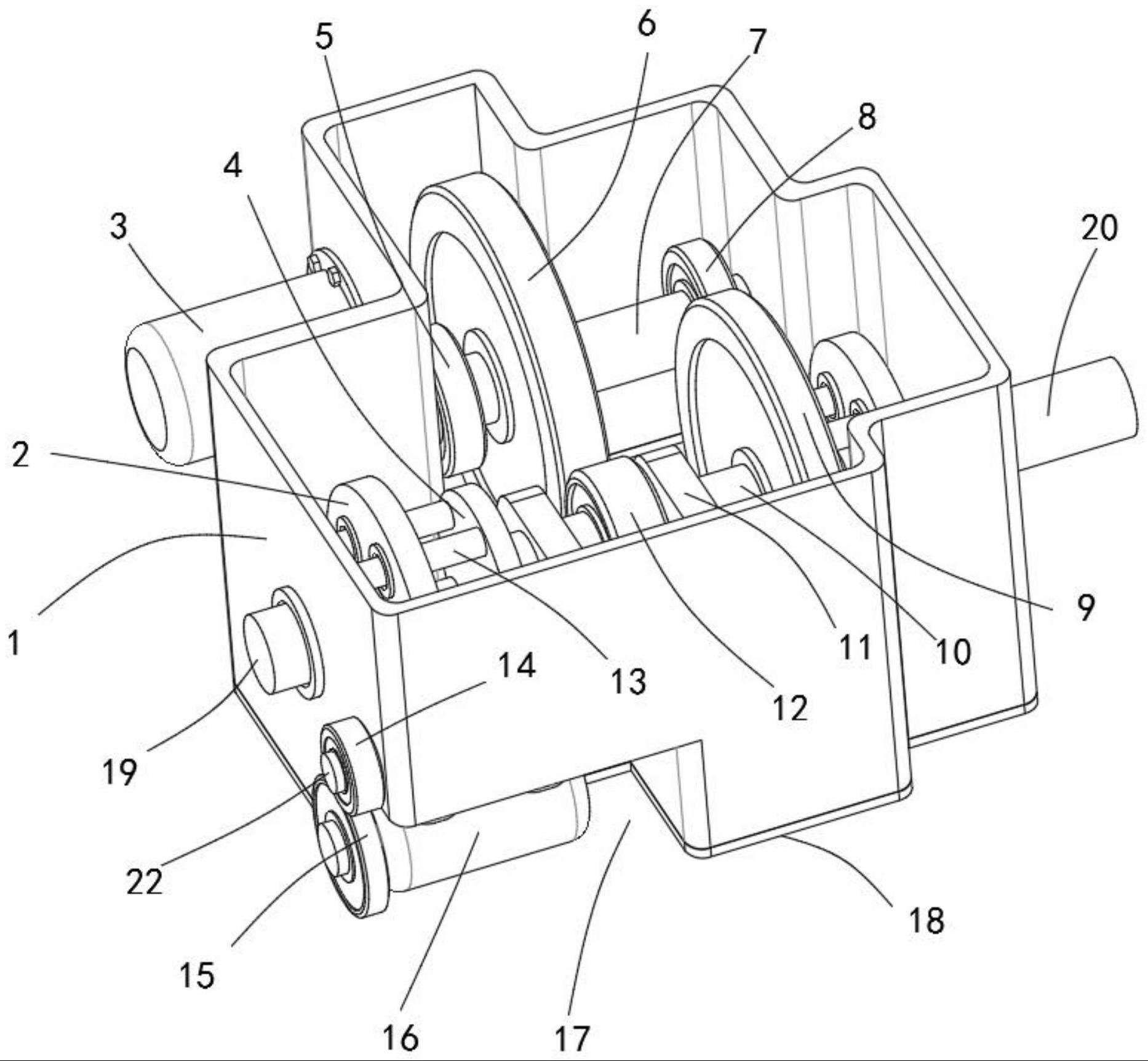
2、本发明提供如下技术方案:一种用于机器人的内啮合齿轮减速机,包括齿轮箱,齿轮箱的底部连接有底壳,齿轮箱内一侧设有第一传动轴,第一传动轴的两端通过轴承安装在齿轮箱上,第一传动轴上同轴安装有第一传动齿轮和第三传动齿轮;
3、在齿轮箱内的另一侧设有第二传动轴,第二传动轴上同轴安装有第二传动齿轮和第四传动齿轮;
4、其中,第四传动齿轮和第三传动齿轮啮合,且第三传动齿轮尺寸小于第四传动齿轮尺寸,第一传动齿轮和第二传动齿轮啮合,且第二传动齿轮尺寸小于第一传动齿轮尺寸;
5、第二传动轴的两端设有滑动机构,第二传动轴在滑动机构上来回移动,使得第四传动齿轮和第三传动齿轮之间或者第一传动齿轮和第二传动齿轮之前啮合。
6、优选地是,齿轮箱的顶部设有密封顶盖,密封顶盖边缘和齿轮箱顶部之间通过螺栓固定。
7、优选地是,第二传动轴位于齿轮箱内部且和第一传动轴平行设置,滑动机构均包括连接在第二传动轴两端的连接盘,连接盘的边缘等间距垂直安装有多根导向支撑杆,导向支撑杆的另一端贯穿设置在固定盘上,固定盘远离第四传动齿轮的一侧均同轴安装在支撑轴上,所述支撑轴均贯穿设置在齿轮箱上,且二者之间通过轴承安装在一起;
8、其中,连接盘和固定盘之间、以及固定盘和齿轮箱之间均设有间隙,该间隙用于第二传动轴往复运动时,导向支撑杆在固定盘内移动;
9、在第四传动齿轮和第四传动齿轮之间的第二传动轴上设有调节机构。
10、优选地是,调节机构包括至少两个导向座,导向座位于第二传动齿轮的两侧,导向座的一端贯穿设置在第二传动轴上,第二传动轴和导向座之间通过轴承连接;
11、导向座的另一端连接在移动座上,移动座内固定安装有丝母,移动座上贯穿设有一根滚珠丝杠,滚珠丝杠安装在丝母内,在滚珠丝杠的上方设有至少一根导向轴,导向轴贯穿在移动座上,且滚珠丝杠和导向轴的两端均连接在支撑座上,支撑座固定连接在齿轮箱的侧壁上;
12、滚珠丝杠的一端贯穿至齿轮箱外,且滚珠丝杠和齿轮箱之间通过轴承连接,在滚珠丝杠的末端连接有第一驱动齿轮;
13、在第一驱动齿轮下方的齿轮箱底部设有第一安装腔,第一安装腔内固定有调节电机,调节电机为自锁电机,调节电机的转轴上连接第二驱动齿轮,第二驱动齿轮和第一驱动齿轮啮合。
14、优选地是,在每块移动座的一侧均设有限位座,限位座连接在齿轮箱的侧壁上。
15、优选地是,其中一根支撑轴伸至齿轮箱外并连接有输出轴,在第一传动轴远离输出轴一端的齿轮箱侧面上设有第二安装腔,第一传动轴的一端通过轴承安装在第二安装腔侧面上;
16、在第二安装腔的侧壁上固定安装有驱动电机,驱动电机的转轴贯穿齿轮箱设置且二者之间通过轴承连接,在齿轮箱内的转轴上安装有第二啮合齿轮,第二啮合齿轮一侧的第一传动轴上安装有第一啮合齿轮,第一啮合齿轮和第二啮合齿轮啮合连接,第二啮合齿轮尺寸小于第一啮合齿轮的尺寸。
17、优选地是,齿轮箱的底部边缘设有若干支撑脚。
18、与现有机器人齿轮架减速机对比,本发明所提出的齿轮减速机可以通过控制调节电机的转动带动滚珠丝杠转动,使得移动座和导向座带动第二传动轴进行往复运动,让两组齿轮组的其中一组进行啮合,改变驱动电机的输出比,从而得到减速或者加速的目的。
技术特征:
1.一种用于机器人的内啮合齿轮减速机,包括齿轮箱(1),齿轮箱(1)的底部连接有底壳(18),其特征在于:齿轮箱(1)内一侧设有第一传动轴(7),第一传动轴(7)的两端通过轴承安装在齿轮箱(1)上,第一传动轴(7)上同轴安装有第一传动齿轮(6)和第三传动齿轮(8);
2.根据权利要求1所述的一种用于机器人的内啮合齿轮减速机,其特征在于:齿轮箱(1)的顶部设有密封顶盖(26),密封顶盖(26)边缘和齿轮箱(1)顶部之间通过螺栓固定。
3.根据权利要求1所述的一种用于机器人的内啮合齿轮减速机,其特征在于:第二传动轴(10)位于齿轮箱(1)内部且和第一传动轴(7)平行设置,滑动机构均包括连接在第二传动轴(10)两端的连接盘(4),连接盘(4)的边缘等间距垂直安装有多根导向支撑杆(13),导向支撑杆(13)的另一端贯穿设置在固定盘(2)上,固定盘(2)远离第四传动齿轮(9)的一侧均同轴安装在支撑轴(19)上,所述支撑轴(19)均贯穿设置在齿轮箱(1)上,且二者之间通过轴承安装在一起;
4.根据权利要求3所述的一种用于机器人的内啮合齿轮减速机,其特征在于:调节机构包括至少两个导向座(11),导向座(11)位于第二传动齿轮(12)的两侧,导向座(11)的一端贯穿设置在第二传动轴(10)上,第二传动轴(10)和导向座(11)之间通过轴承连接;
5.根据权利要求4所述的一种用于机器人的内啮合齿轮减速机,其特征在于:在每块移动座(27)的一侧均设有限位座(28),限位座(28)连接在齿轮箱(1)的侧壁上。
6.根据权利要求3所述的一种用于机器人的内啮合齿轮减速机,其特征在于:其中一根支撑轴(19)伸至齿轮箱(1)外并连接有输出轴(20),在第一传动轴(7)远离输出轴(20)一端的齿轮箱(1)侧面上设有第二安装腔(29),第一传动轴(7)的一端通过轴承安装在第二安装腔(29)侧面上;
7.根据权利要求1所述的一种用于机器人的内啮合齿轮减速机,其特征在于:齿轮箱(1)的底部边缘设有若干支撑脚(24)。
技术总结
本发明涉及齿轮减速机技术领域,且公开了一种用于机器人的内啮合齿轮减速机,包括齿轮箱,齿轮箱内一侧设有第一传动轴,第一传动轴的两端通过轴承安装在齿轮箱上,第一传动轴上同轴安装有第一传动齿轮和第三传动齿轮;在齿轮箱内的另一侧设有第二传动轴,第二传动轴上同轴安装有第二传动齿轮和第四传动齿轮;其中,第四传动齿轮和第三传动齿轮啮合,且第三传动齿轮尺寸小于第四传动齿轮尺寸,第一传动齿轮和第二传动齿轮啮合,且第二传动齿轮尺寸小于第一传动齿轮尺寸。本发明所提出的齿轮减速机可以通过控制调节电机带动第二传动轴进行往复运动,让两组齿轮组的其中一组进行啮合,改变驱动电机的输出比。
技术研发人员:黄小华,李志滔,陈志满,龙腾发
受保护的技术使用者:广东天太机器人有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!