一种汽车差速器保护控制方法与流程
本发明属于汽车,具体涉及一种汽车差速器保护控制方法。
背景技术:
1、汽车差速器是驱动桥的主要部件,其作用是将车辆动力进行减速增扭后,传递给两个半轴,同时允许两个半轴以不同的速度转动,使两侧车轮尽可能以纯滚动的形式行驶不同的距离,减少轮胎与地面的摩擦。
2、面对路面附着力系数多变复杂路况,如两侧轮胎附着力不同,基于差速器的物理特性,极易出现单侧轮胎转速骤增,而另一侧轮胎减速情况,在没有有效保护或者明确提醒的情况下,驾驶员为维持原行进速度,将进一步加大油门导致飞车现象更加严重。随着车辆的不断迭代发展,车辆动力上限不断提高,将有可能将差速器出现断轴、烧蚀,锁死,壳体破裂等严重情况,引发交通事故。
3、现有技术方案一般采用tcs等车辆动态稳定性控制系统或者开环降扭消除飞车现象,但tcs控制逻辑是基于车辆稳态控制而非差速器保护,触发条件一般较高,保护效果差。且tcs功能可被手动关闭或因故障关闭,此时一旦进入飞车工况,将无法有效对打滑现象进行限制,将对用户造成财产损失甚至人身伤害。开环降扭控制精度差,可能产生过激调控或者震荡等不良控制结果,导致车辆行驶舒适性大大降低。
技术实现思路
1、本发明的目的就在于提供一种汽车差速器保护控制方法,以解决当前同类控制方案中的开环控制痛点,在部分工况下响应过度或响应不足甚至产生系统震荡的问题。本发明通过采用时间阈值和车速阈值滞环,有效提升系统控制稳健性,采用pi控制扭矩限值,控制精度较开环限扭得到大幅提升,采用扭矩波动速率限制,避免因计算产生过大扭矩控制幅度而产生的不舒适感。
2、本发明的目的是通过以下技术方案实现的:
3、一种差速器保护控制方法,包括以下步骤:
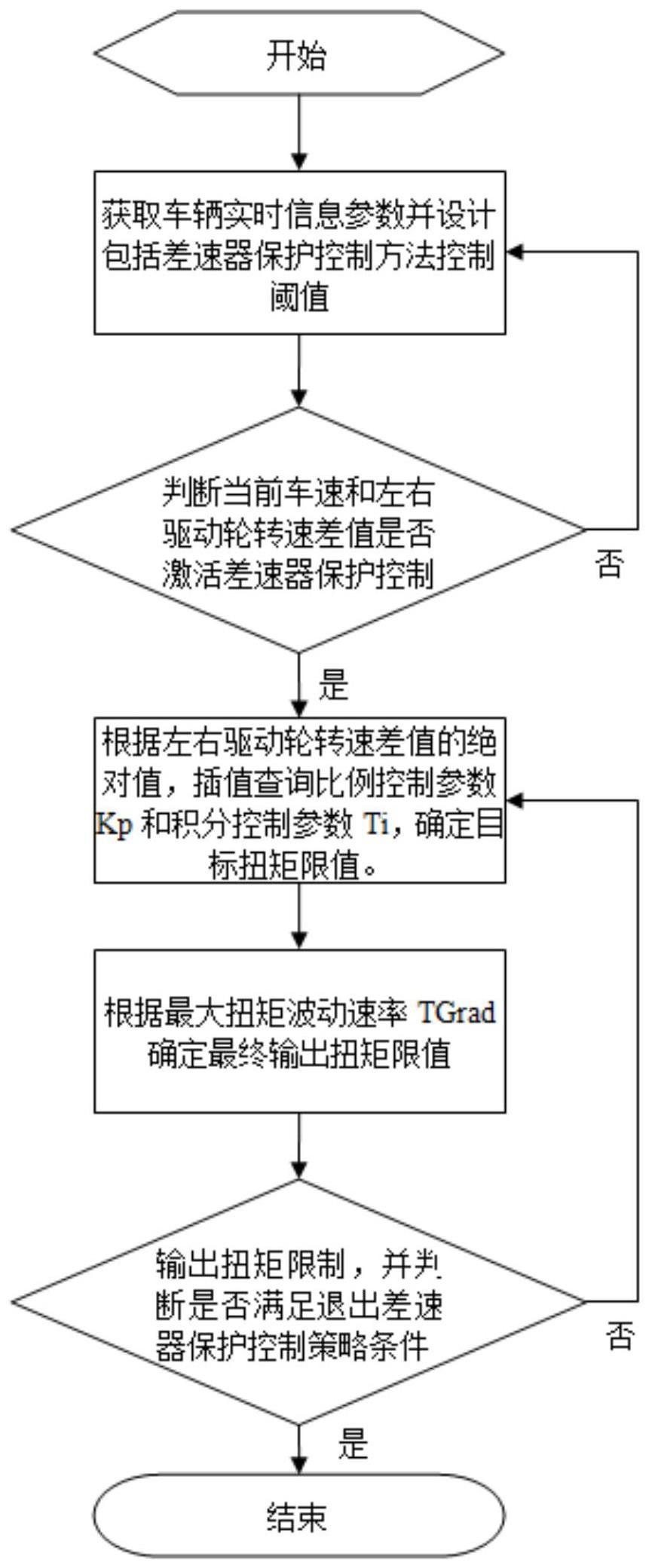
4、a、获取车辆实时信息参数并设计差速器保护控制方法控制阈值;
5、其中,所述车辆实时信息参数包括车速v,当前输出扭矩t,左驱动轮转速r左,右驱动轮转速r右;所述差速器保护控制方法控制阈值包括激活车速阈值vact,激活转速差阈值ract,激活时间阈值tact,退出车速阈值vdeact,退出转速差阈值rdeact,退出时间阈值tdeact;
6、b、判断当前车速和左右驱动轮转速差值是否激活差速器保护控制;
7、所述左右驱动轮转速差值的绝对值rdiff=|左驱动轮转速r左-右驱动轮转速r右|;所述车速应当小于激活车速阈值vact;驱动轮转速r左和右驱动轮转速r右的差值的绝对值需要大于预置的激活转速差阈值ract,且持续时间超过激活时间阈值tact,激活转速差阈值ract需要通过标定确定;当上述条件被达成后,激活差速器保护控制,否则持续进行车速和转速差条件判断,直到激活条件被达成;
8、c、根据左右驱动轮转速差值的绝对值,插值查询比例控制参数kp和积分控制参数ti,确定目标扭矩限值;当激活条件被达成时,左右驱动轮转速差值的绝对值rdiff查表计算扭矩限制的p项和i项参数,并根据如下方式计算目标扭矩限值:
9、
10、其中,e(t)为左右驱动轮转速差值的绝对值rdiff;
11、d、根据最大扭矩波动速率tgrad确定最终输出扭矩限值;
12、所述最大扭矩波动速率tgrad为单位时间内最大的扭矩波动速率;最终输出的扭矩限制=min[t-tgrad,t(t)];
13、e、输出扭矩限制,并判断是否满足退出差速器保护控制策略条件;
14、经过步骤c多次循环运算后,实际输出扭矩将逐渐下降,左右驱动轮转速插值的绝对值rdiff亦将逐渐下降;当左右驱动轮转速插值的绝对值rdiff小于退出转速差阈值rdeact,且持续时间t1>退出时间阈值tdeact后,退出差速器主动保护控制。
15、进一步地,步骤a,所述车速v信号由esp系统获取并提供,对于未匹配esp系统的车辆,由相关替代零部件提供车速v信号值;所述当前输出扭矩由发动机控制单元提供,对于混合动力车型和纯电动车型,该扭矩由整车控制器提供。
16、进一步地,步骤a,所述车辆为电动汽车、混合动力汽车或燃油动力汽车。
17、进一步地,步骤a,所述左右驱动轮转速信号可以是前轮信号,也可以是后轮信号;所述车辆包括前驱车辆和后驱车辆,对于前驱车辆,获取左前、右前两个轮的转速信号进行计算,对于后驱车辆,获取左后、右后的两个轮的转速信号进行计算。
18、进一步地,步骤b,从整车驾驶性安全考虑,当车速足够高时,整车的安全策略应当基于车辆稳定性和驾乘人员安全考虑,当车速高于一定值以后,非esp系统的扭矩限制应当被慎重的考虑,激活车速阈值vact可被标定。
19、进一步地,步骤b,标定过程需要考虑差速器设计时的许用差速转速,激活时间阈值tact需要通过标定确定,标定过程需要考虑系统敏捷性。
20、进一步地,步骤c,比例控制参数kp和积分控制参数ti的标定应该参考差速器零部件设计特性,具体的数值通过实车标定确定,防止对车辆正常通过弯道造成负面影响,比例控制参数kp和积分控制参数ti的标定表格可以如下表所示,其坐标轴为左右驱动轮转速差值的绝对值rdiff。
21、进一步地,步骤e,退出转速差阈值rdeact由实车标定确定,且标定值小于激活转速差阈值ract,并合理设置滞环。
22、进一步地,步骤e,退出时间阈值tdeact需要通过标定确定,标定过程需要考虑系统敏捷性。
23、与现有技术相比,本发明的有益效果是:
24、本发明汽车差速器保护控制方法,基于左右驱动轮转速差和车辆实时状态信息,对输出扭矩进行闭环控制,采用时间阈值和车速阈值滞环,有效提升系统控制稳健性,采用pi控制扭矩限值,控制精度较开环限扭得到大幅提升,采用扭矩波动速率限制,避免因计算产生过大扭矩控制幅度而产生的不舒适感;能够有效弥补tcs未激活或无法激活的条件下的差速器保护,降低了车辆失控风险,节约了维修成本,闭环控制也补足了开环控制的精度不足的缺陷。
技术特征:
1.一种汽车差速器保护控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种汽车差速器保护控制方法,其特征在于:步骤a,所述车速v信号由esp系统获取并提供,对于未匹配esp系统的车辆,由相关替代零部件提供车速v信号值;所述当前输出扭矩由发动机控制单元提供,对于混合动力车型和纯电动车型,该扭矩由整车控制器提供。
3.根据权利要求1所述的一种汽车差速器保护控制方法,其特征在于:步骤a,所述车辆为电动汽车、混合动力汽车或燃油动力汽车。
4.根据权利要求1所述的一种汽车差速器保护控制方法,其特征在于:步骤a,所述左右驱动轮转速信号可以是前轮信号,也可以是后轮信号;所述车辆包括前驱车辆和后驱车辆,对于前驱车辆,获取左前、右前两个轮的转速信号进行计算,对于后驱车辆,获取左后、右后的两个轮的转速信号进行计算。
5.根据权利要求1所述的一种汽车差速器保护控制方法,其特征在于:步骤b,从整车驾驶性安全考虑,当车速足够高时,整车的安全策略应当基于车辆稳定性和驾乘人员安全考虑,当车速高于一定值以后,非esp系统的扭矩限制应当被慎重的考虑,激活车速阈值vact可被标定。
6.根据权利要求1所述的一种汽车差速器保护控制方法,其特征在于:步骤b,标定过程需要考虑差速器设计时的许用差速转速,激活时间阈值tact需要通过标定确定,标定过程需要考虑系统敏捷性。
7.根据权利要求1所述的一种汽车差速器保护控制方法,其特征在于:步骤c,比例控制参数kp和积分控制参数ti的标定应该参考差速器零部件设计特性,具体的数值通过实车标定确定,防止对车辆正常通过弯道造成负面影响,比例控制参数kp和积分控制参数ti的标定表格可以如下表所示,其坐标轴为左右驱动轮转速差值的绝对值rdiff。
8.根据权利要求1所述的一种汽车差速器保护控制方法,其特征在于:步骤e,退出转速差阈值rdeact由实车标定确定,且标定值小于激活转速差阈值ract,并合理设置滞环。
9.根据权利要求1所述的一种汽车差速器保护控制方法,其特征在于:步骤e,退出时间阈值tdeact需要通过标定确定,标定过程需要考虑系统敏捷性。
技术总结
本发明涉及一种汽车差速器保护控制方法,包括获取车辆实时信息参数并设计差速器保护控制方法控制阈值;判断当前车速和左右驱动轮转速差值是否激活差速器保护控制;根据最大扭矩波动速率确定最终输出扭矩限值;输出扭矩限制,并判断是否满足退出差速器保护控制策略条件。本方法基于左右驱动轮转速差和车辆实时状态信息,对输出扭矩进行闭环控制,采用时间阈值和车速阈值滞环,有效提升系统控制稳健性,采用PI控制扭矩限值,控制精度较开环限扭得到大幅提升,采用扭矩波动速率限制,避免因计算产生过大扭矩控制幅度;有效弥补TCS未激活或无法激活条件下的差速器保护,降低车辆失控风险,节约成本,闭环控制也补足了开环控制的精度不足的缺陷。
技术研发人员:李洋,钱辛,汪禄刚,余彩耀,安杰
受保护的技术使用者:一汽奔腾轿车有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!