旋转机构补偿齿轮间隙的方法及系统与流程
本申请涉及电机驱动,特别是涉及一种旋转机构补偿齿轮间隙的方法及系统。
背景技术:
1、旋转机构是机械运动中常用的一种机构,广泛应用于各种机械设备中,旋转机构的作用是将输入的线性运动转化为旋转运动,或将旋转运动传递给其他机构。常见的旋转机构包括螺旋式的旋转机构、齿轮式的旋转机构和曲柄式的旋转机构。
2、目前,对于齿轮式的旋转机构的应用中,齿轮式的旋转机构采用电机驱动,电机带动旋转机构的齿轮转动,当换向运动时,旋转机构启动时会产生“哒”的一声异响,甚至导致设备产生抖动,影响设备可靠性,用户体验感差。
技术实现思路
1、基于此,有必要针对上述现有的齿轮式的旋转机构中存在的问题,提供一种能够精准消除旋转机构换向运动时产生的异响,避免设备产生抖动,提高设备可靠性和用户体验感的旋转机构补偿齿轮间隙的方法及系统。
2、第一方面,本申请提供一种旋转机构补偿齿轮间隙的方法,包括以下步骤:
3、获取旋转机构的当前运动状态;
4、在当前运动状态为换向运动状态时,向电机传输第一驱动信号;第一驱动信号用于指示电机带动旋转机构补偿齿轮间隙;
5、在齿轮间隙补偿完成时,向电机传输第二驱动信号;第二驱动信号用于指示电机带动旋转机构正常转动;第二驱动信号的占空比大于第一驱动信号的占空比。
6、可选的,在当前运动状态为换向运动状态时,向电机传输第一驱动信号的步骤包括:
7、在当前运动状态为换向运动状态时,向电机传输初始的第一驱动信号;
8、检测电机的当前运行状态,并根据检测的结果,在当前运行状态为第一次堵转状态时,调节第一驱动信号的占空比,将调节后的第一驱动信号传输给电机,直至检测到电机的当前运行状态为转动状态。
9、可选的,在当前运行状态为第一次堵转状态时,调节第一驱动信号的占空比,将调节后的第一驱动信号传输给电机,直至检测到电机的当前运行状态为转动状态的步骤包括:
10、在当前运行状态为第一次堵转状态时,依次基于预设步长增大第一驱动信号的占空比,并将增大占空比后的第一驱动信号传输给电机,直至检测到电机的当前运行状态为转动状态。
11、可选的,在齿轮间隙补偿完成时,向电机传输第二驱动信号的步骤包括:
12、在当前运行状态为第二次堵转状态时,向电机传输第二驱动信号。
13、可选的,在当前运行状态为第二次堵转状态时,向电机传输第二驱动信号的步骤包括:
14、在当前运行状态为第二次堵转状态时,基于预设阈值调整第一驱动信号的占空比,将调整后的第一驱动信号确认为第二驱动信号,并将第二驱动信号传输给电机。
15、可选的,获取旋转机构的当前运动状态的步骤之前包括:
16、获取旋转机构的上一次运动方向和当前运动方向;
17、获取旋转机构的当前运动状态的步骤之后包括:
18、在上一次运动方向和当前运动方向为相反运动方向时,将当前运动状态确认为换向运动状态。
19、可选的,获取旋转机构的当前运动状态的步骤之后还包括:
20、在上一次运动方向和当前运动方向为相同运动方向时,将当前运动状态确认为同向运动状态。
21、可选的,获取旋转机构的当前运动状态的步骤之后还包括:
22、在当前运动状态为同向运动状态时,向电机传输第二驱动信号。
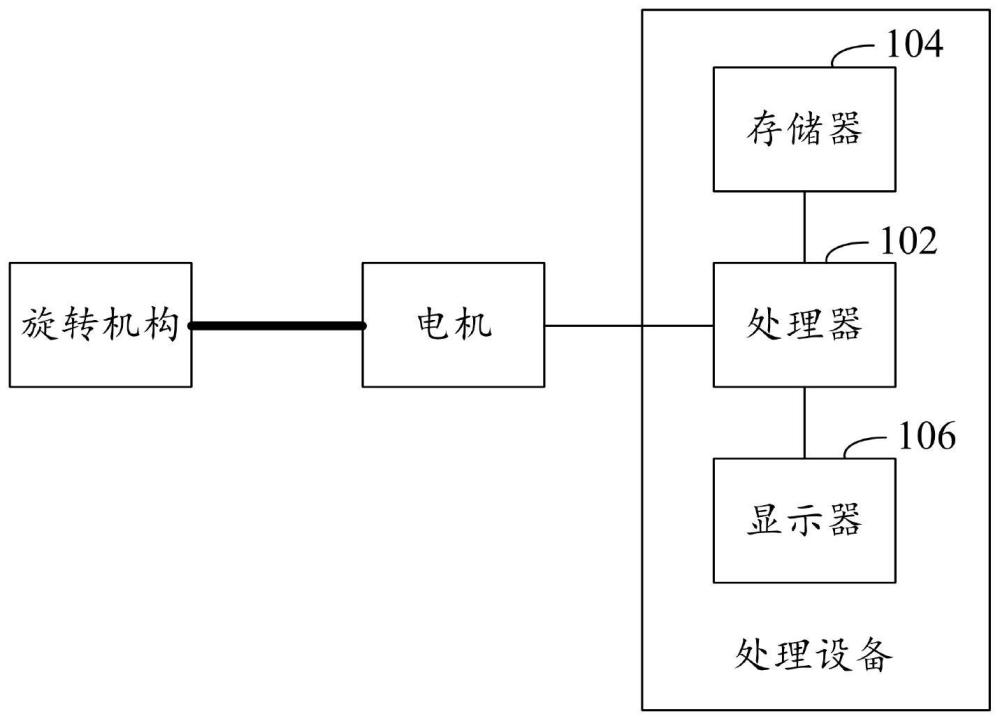
23、第二方面,本申请提供一种旋转机构补偿齿轮间隙的系统,包括控制设备、旋转机构和电机;控制设备电性连接电机;电机与旋转机构机械连接;
24、控制设备用于执行如上述任意一项的旋转机构补偿齿轮间隙的方法的步骤。
25、可选的,控制设备包括控制器和角度传感器;旋转机构包括一级齿轮、二级齿轮、旋转主轴和支架;
26、电机与一级齿轮机械连接,一级齿轮与二级齿轮转动连接,二级齿轮与旋转主轴机械连接,旋转主轴与支架机械连接;角度传感器与旋转主轴机械连接;
27、控制器分别电性连接电机、角度传感器。
28、上述技术方案中的一个技术方案具有如下优点和有益效果:
29、上述的旋转机构补偿齿轮间隙的方法中,通过获取旋转机构的当前运动状态;在当前运动状态为换向运动状态时,向电机传输第一驱动信号;第一驱动信号用于指示电机带动旋转机构补偿齿轮间隙;在齿轮间隙补偿完成时,向电机传输第二驱动信号;第二驱动信号用于指示电机带动旋转机构正常转动;第二驱动信号的占空比大于第一驱动信号的占空比,实现旋转机构无异响换向运动。本申请通过在旋转机构换向运动时,先用占空比较小的第一驱动信号驱动旋转机构运动,实现对旋转机构中齿轮与齿轮之间的间隙补偿,完成间隙补偿后,用占空比较大的第二驱动信号驱动旋转机构运动,使得旋转机构进入正常工作状态,进而精准消除旋转机构换向运动时产生的异响,避免设备产生抖动,提高设备可靠性和用户体验感。
技术特征:
1.一种旋转机构补偿齿轮间隙的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的旋转机构补偿齿轮间隙的方法,其特征在于,所述在所述当前运动状态为换向运动状态时,向电机传输第一驱动信号的步骤包括:
3.根据权利要求2所述的旋转机构补偿齿轮间隙的方法,其特征在于,所述在所述当前运行状态为第一次堵转状态时,调节所述第一驱动信号的占空比,将调节后的第一驱动信号传输给所述电机,直至检测到所述电机的当前运行状态为转动状态的步骤包括:
4.根据权利要求2所述的旋转机构补偿齿轮间隙的方法,其特征在于,所述在所述齿轮间隙补偿完成时,向所述电机传输第二驱动信号的步骤包括:
5.根据权利要求4所述的旋转机构补偿齿轮间隙的方法,其特征在于,所述在所述当前运行状态为第二次堵转状态时,向所述电机传输所述第二驱动信号的步骤包括:
6.根据权利要求1所述的旋转机构补偿齿轮间隙的方法,其特征在于,所述获取旋转机构的当前运动状态的步骤之前包括:
7.根据权利要求6所述的旋转机构补偿齿轮间隙的方法,其特征在于,所述获取旋转机构的当前运动状态的步骤之后还包括:
8.根据权利要求7所述的旋转机构补偿齿轮间隙的方法,其特征在于,所述获取旋转机构的当前运动状态的步骤之后还包括:
9.一种旋转机构补偿齿轮间隙的系统,其特征在于,包括控制设备、旋转机构和电机;所述控制设备电性连接所述电机;所述电机与所述旋转机构机械连接;
10.根据权利要求9所述的旋转机构补偿齿轮间隙的系统,其特征在于,所述控制设备包括控制器和角度传感器;所述旋转机构包括一级齿轮、二级齿轮、旋转主轴和支架;
技术总结
本申请涉及一种旋转机构补偿齿轮间隙的方法及系统。所述方法通过获取旋转机构的当前运动状态;在当前运动状态为换向运动状态时,向电机传输第一驱动信号;第一驱动信号用于指示电机带动旋转机构补偿齿轮间隙;在齿轮间隙补偿完成时,向电机传输第二驱动信号;第二驱动信号用于指示电机带动旋转机构正常转动;第二驱动信号的占空比大于第一驱动信号的占空比,实现对旋转机构中齿轮与齿轮之间的间隙补偿,进而精准消除旋转机构换向运动时产生的异响,避免设备产生抖动,提高设备可靠性和用户体验感。
技术研发人员:刘锦峰,陈亮,刘琨
受保护的技术使用者:武汉曼瑞电子科技有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!