一种仿生机器人油气管道行走机构
本发明涉及油气管道机器人,具体是指一种仿生机器人油气管道行走机构。
背景技术:
1、管道广泛应用于各行各业,但由于时间和使用环境等因素,往往会出现断裂等问题,而且管道往往有相当长的长度,有些管道埋在地下,给故障定位和导航带来相当大的困难,因此管道机器人被广泛应用于管道维护和故障定位导航中。
2、对于大直径管道结构,现有的管道机器人大多采用基于自重的轮式驱动,往往多个行走机构对应多个电源,成本高且需要考虑驱动的一致性。一方面,小口径管道机器人很少,另一方面,现有的适用于小口径的管道机器人往往牵引力不足,甚至没有驱动力,需要借助电缆等装置辅助,这限制了管道机器人在管道中的有效爬行深度。
3、因此,本领域的研究人员致力于研究一种高可靠性、高通过性的仿生四足机器人管道行走定位导航机构。
技术实现思路
1、针对以往管道机器人技术领域存在的问题和有待改进的地方,本发明提供一种仿生机器人油气管道行走机构。
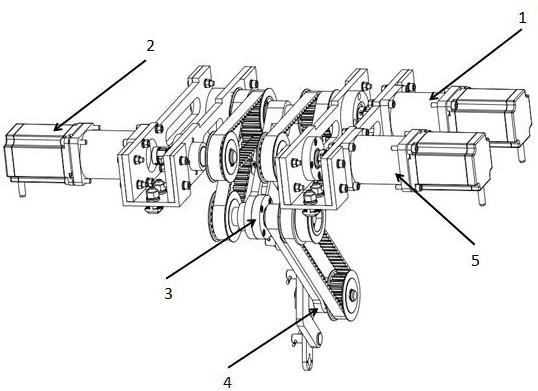
2、本发明是通过如下技术方案实现的,提供一种仿生机器人油气管道行走机构,包括机架、大腿、小腿、足端、驱动轴ⅰ组件、驱动轴ⅱ组件、驱动轴ⅲ组件、驱动轴ⅳ组件和驱动轴ⅴ组件;所述驱动轴ⅰ组件包括轴接在机架上的驱动轴ⅰ、带动驱动轴ⅰ旋转的电机ⅰ以及均轴接在驱动轴ⅰ上的惰轮ⅰ和惰轮ⅱ,所述大腿根部与驱动轴ⅰ固接;所述驱动轴ⅲ组件包括轴接在大腿端部的驱动轴ⅲ、固接在驱动轴ⅲ上的同步带轮ⅱ以及轴接在驱动轴ⅲ上的惰轮ⅲ,所述小腿根部与驱动轴ⅲ固接;所述驱动轴ⅱ组件包括轴接在机架上的驱动轴ⅱ、带动驱动轴ⅱ旋转的电机ⅱ以及固接在驱动轴ⅱ上的同步带轮ⅰ,所述同步带轮ⅰ与惰轮ⅱ传动连接,惰轮ⅱ与同步带轮ⅱ传动连接;所述驱动轴ⅳ组件包括轴接在小腿端部的驱动轴ⅳ以及固接在驱动轴ⅳ上的同步带轮ⅲ,所述足端根部与驱动轴ⅳ固接;所述驱动轴ⅴ组件包括轴接在机架上的驱动轴ⅴ、带动驱动轴ⅴ旋转的电机ⅲ以及固接在驱动轴ⅴ上的同步带轮ⅳ,所述同步带轮ⅳ与惰轮ⅰ传动连接,惰轮ⅰ与惰轮ⅲ传动连接,惰轮ⅲ与同步带轮ⅲ传动连接。
3、作为优化,所述机架包括依次并排设置的侧板ⅰ、侧板ⅱ、侧板ⅲ和侧板ⅳ,所述侧板ⅰ和侧板ⅱ通过u型连接板ⅰ螺栓连接,侧板ⅲ和侧板ⅳ通过u型连接板ⅱ螺栓连接。
4、作为优化,所述电机ⅱ固接在侧板ⅳ上,电机ⅰ和电机ⅲ固接在侧板ⅰ上。
5、作为优化,所述电机ⅰ上装有减速器ⅰ,电机ⅱ上装有减速器ⅱ,电机ⅲ上装有减速器ⅲ。
6、作为优化,所述减速器ⅰ通过联轴器ⅰ与驱动轴ⅰ连接,减速器ⅱ通过联轴器ⅱ与驱动轴ⅱ连接,减速器ⅲ通过联轴器ⅲ与驱动轴ⅴ连接。
7、作为优化,还包括限位块ⅰ和限位块ⅱ,限位块ⅰ两端分别与大腿和小腿可拆卸连接,限位块ⅱ两端分别与小腿和足端可拆卸连接。
8、作为优化,所述同步带轮ⅱ和惰轮ⅲ分别位于大腿两侧。
9、作为优化,所述大腿、小腿和足端呈折线状排布。
10、作为优化,所述同步带轮ⅰ通过同步带ⅰ与惰轮ⅱ传动连接,惰轮ⅱ通过同步带ⅲ与同步带轮ⅱ传动连接。
11、作为优化,所述同步带轮ⅳ通过同步带ⅱ与惰轮ⅰ传动连接,惰轮ⅰ通过同步带ⅳ与惰轮ⅲ传动连接,惰轮ⅲ通过同步带ⅴ与同步带轮ⅲ传动连接。
12、本发明的有益效果为:本发明的一种仿生机器人油气管道行走机构,通过驱动轴ⅰ组件、驱动轴ⅱ组件、驱动轴ⅲ组件、驱动轴ⅳ组件和驱动轴ⅴ组件共同配合控制大腿、小腿和足端实现机器人行走,驱动组ⅰ组件直接带动大腿运动,驱动轴ⅱ组件通过同步带和同步带轮带动小腿运动,驱动轴ⅴ组件通过同步带、同步带轮带动足端运动。
13、本发明提供了一种可靠性高、对管径和管壁波动程度适应性强的一种仿生机器人油气管道行走机构,与现有的管道机器人相比,基于这种结构的管道机器人在管道渗透率方面有很大的提高,管道机器人通过合理的传动结构,可以适应不同的管道环境,进行更长距离的运动,解决了机器人运动冲击力大、稳定性低的问题,管道机器人行走机构采用三关节腿式结构进行,摆脱了机动性小、过障能力低、空间占比大的问题,能够适应各种口径、坡度攀爬能力大的管道。
技术特征:
1.一种仿生机器人油气管道行走机构,其特征在于:包括机架、大腿(18)、小腿(36)、足端(47)、驱动轴ⅰ组件(1)、驱动轴ⅱ组件(2)、驱动轴ⅲ组件(3)、驱动轴ⅳ组件(4)和驱动轴ⅴ组件(5);
2.根据权利要求1所述的一种仿生机器人油气管道行走机构,其特征在于:所述机架包括依次并排设置的侧板ⅰ(15)、侧板ⅱ(10)、侧板ⅲ(13)和侧板ⅳ(14),所述侧板ⅰ(15)和侧板ⅱ(10)通过u型连接板ⅰ(22)螺栓连接,侧板ⅲ(13)和侧板ⅳ(14)通过u型连接板ⅱ(30)螺栓连接。
3.根据权利要求2所述的一种仿生机器人油气管道行走机构,其特征在于:所述电机ⅱ(23)固接在侧板ⅳ(14)上,电机ⅰ(7)和电机ⅲ(55)固接在侧板ⅰ(15)上。
4.根据权利要求1所述的一种仿生机器人油气管道行走机构,其特征在于:所述电机ⅰ(7)上装有减速器ⅰ(8),电机ⅱ(23)上装有减速器ⅱ(24),电机ⅲ(55)上装有减速器ⅲ(56)。
5.根据权利要求4所述的一种仿生机器人油气管道行走机构,其特征在于:所述减速器ⅰ(8)通过联轴器ⅰ(9)与驱动轴ⅰ(20)连接,减速器ⅱ(24)通过联轴器ⅱ(26)与驱动轴ⅱ(29)连接,减速器ⅲ(56)通过联轴器ⅲ(66)与驱动轴ⅴ(69)连接。
6.根据权利要求1所述的一种仿生机器人油气管道行走机构,其特征在于:还包括限位块ⅰ(61)和限位块ⅱ(64),限位块ⅰ(61)两端分别与大腿(18)和小腿(36)可拆卸连接,限位块ⅱ(64)两端分别与小腿(36)和足端(47)可拆卸连接。
7.根据权利要求1所述的一种仿生机器人油气管道行走机构,其特征在于:所述同步带轮ⅱ(39)和惰轮ⅲ(34)分别位于大腿(18)两侧。
8.根据权利要求1所述的一种仿生机器人油气管道行走机构,其特征在于:所述大腿(18)、小腿(36)和足端(47)呈折线状排布。
9.根据权利要求1所述的一种仿生机器人油气管道行走机构,其特征在于:所述同步带轮ⅰ(32)通过同步带ⅰ(53)与惰轮ⅱ(19)传动连接,惰轮ⅱ(19)通过同步带ⅲ(57)与同步带轮ⅱ(39)传动连接。
10.根据权利要求1所述的一种仿生机器人油气管道行走机构,其特征在于:所述同步带轮ⅳ(72)通过同步带ⅱ(54)与惰轮ⅰ(17)传动连接,惰轮ⅰ(17)通过同步带ⅳ(58)与惰轮ⅲ(34)传动连接,惰轮ⅲ(34)通过同步带ⅴ(60)与同步带轮ⅲ(50)传动连接。
技术总结
本发明涉及一种仿生机器人油气管道行走机构,包括机架、大腿、小腿、足端、驱动轴Ⅰ组件、驱动轴Ⅱ组件、驱动轴Ⅲ组件、驱动轴Ⅳ组件和驱动轴Ⅴ组件,通过驱动轴Ⅰ组件、驱动轴Ⅱ组件、驱动轴Ⅲ组件、驱动轴Ⅳ组件和驱动轴Ⅴ组件共同配合控制大腿、小腿和足端实现机器人行走,与现有的管道机器人相比,基于这种结构的管道机器人在管道渗透率方面有很大的提高,管道机器人通过合理的传动结构,可以适应不同的管道环境,进行更长距离的运动,解决了机器人运动冲击力大、稳定性低的问题,管道机器人行走机构采用三关节腿式结构进行,摆脱了机动性小、过障能力低、空间占比大的问题,能够适应各种口径、坡度攀爬能力大的管道。
技术研发人员:陈佳,孔贝贝,杨红秀,赵鑫
受保护的技术使用者:齐鲁理工学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!