一种单飞轮可重置惯性阻尼器
本发明属于结构消能减震(振),涉及到一种单飞轮可重置惯性阻尼器,是一种可应用于小型结构或桥梁拉索结构中的被动消能减震(振)装置,用来抑制结构在地震或风振下的振动。
背景技术:
1、提高土木结构和基础设施的服役性能,有力提高土木结构的抗风、抗震性能具有重要的战略意义。被动控制技术不依赖于外部能源的输入,是一种稳定、可靠的振动控制策略,被广泛应用于土木结构的振动控制中。
2、近些年来,惯容器成为土木领域研究的热点。惯容器是一种加速度型的减震器,它的理论模型是一个两节点单元,单元出力是一种惯性力,正比于两节点间的相对加速度,比例系数的大小表征了惯容器的出力性能。惯容器可以显著减小输入结构的荷载强度,从而降低结构响应,而且惯容器对长周期结构减震(振)效果更明显。
3、研究表明,惯容器在结构减速阶段会提供不利的推力,从而延长结构减速的过程,最终使得结构位移响应过大。在惯容器的飞轮和传动系统之间引入棘轮装置后,飞轮只能单向转动,并且只有当结构处于加速阶段时飞轮才会受驱动,且飞轮不会向结构回传荷载,可以从机理上解决飞轮向结构提供不利推力的问题。尽管如此,由于飞轮缺乏耗能机制,从结构获得的动能无法被消耗或转移,因此飞轮在下一个振动周期开始前始终保持一定的速度空转,所以装置的耗能减震(振)的作用无法得以持续高效地发挥。
技术实现思路
1、为解决上述问题,本发明提供一种单飞轮可重置惯性阻尼器,该阻尼器只在结构每个振动周期中的特定加速阶段出力,在特定的减速阶段利用电涡流阻尼实现飞轮减速或制动,保证飞轮在加速阶段前处于低速或静止状态,结构在往复振动中只在特定加速阶段获得惯性力和阻尼力,该阻尼器以被动形式近似实现了bangbang控制。
2、本发明的技术方案是:
3、一种单飞轮可重置惯性阻尼器,包括齿轮齿条传动与锥齿轮换向系统、飞轮与电涡流阻尼系统。
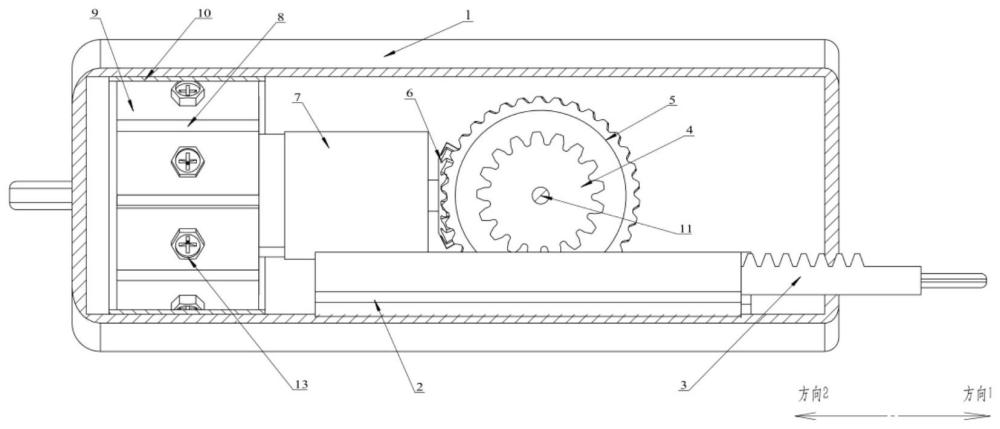
4、所述的齿轮齿条传动与锥齿轮换向系统,包括装置外壳1、齿条导轨2、齿条3、圆柱齿轮4、大圆锥齿轮5、小圆锥齿轮6、变速器7、传动杆11和单向轴承12;所述的装置外壳1为筒体结构,其一端密封,且外部设有圆环,用于阻尼器的安装,另一端为开口结构;所述的齿条导轨2、齿条3、圆柱齿轮4、大圆锥齿轮5和单向轴承12各两个;所述的齿条导轨2,平行固定在装置外壳1内壁上,所述的齿条3安装在齿条导轨2上,齿条3沿着齿条导轨2往复运动;齿条3的一端位于装置外壳1内,另一端位于装置外壳1外,且位于装置外壳1外的端部通过连接板连接为一体,连接板上设有圆环,用于阻尼器的安装;所述的圆柱齿轮4固定在传动杆11上,传动杆11的两端固定在装置外壳1内壁上,两个圆柱齿轮4分别与两个齿条3啮合,齿条3带动圆柱齿轮4转动,通过传动杆11连接并带动单向轴承12旋转;所述的大圆锥齿轮5通过单向轴承12安装在传动杆11上,位于两个圆柱齿轮4之间,所述的小圆锥齿轮6安装在两个大圆锥齿轮5之间,与两个大圆锥齿轮5啮合;当单向轴承12的锁死方向与同侧的大圆锥齿轮5的运动方向一致时,大圆锥齿轮5带动小圆锥齿轮6转动,小圆锥齿轮6通过啮合并带动另一侧的大圆锥齿轮5空转;所述的变速器7安装在装置外壳1内,其输出轴与小圆锥齿轮6连接,通过变速器7传动到飞轮与电涡流阻尼系统,变速器7对小圆锥齿轮6的转速进行放大。
5、所述的飞轮与电涡流阻尼系统,包括飞轮8、磁铁片9、铜环10和磁铁固定螺栓13;所述的飞轮8与变速器7输入轴连接,一组瓦片形磁铁片9通过磁铁固定螺栓13固定在飞轮8的表面,铜环10固定在装置外壳1的内表面;飞轮8带动磁铁片9旋转,磁铁片9产生的径向磁场旋转,在铜环10内产生电涡流,进行能量耗散。
6、本发明的有益效果:本发明保证了在结构往复运动过程中阻尼器在结构速度大小超越飞轮速度阶段提供惯性力和阻尼力,其余阶段不提供控制力,同时飞轮在该时间段内减速制动,使得结构往复运动时可以持续在加速阶段获得惯性力和阻尼力。本发明的装置实现了一种惯容·阻尼的分段控制模型,以被动装置的形式近似实现bangbang控制策略,兼具了被动控制的稳定可靠和主动控制的高性能。
技术特征:
1.一种单飞轮可重置惯性阻尼器,其特征在于,所述的单飞轮可重置惯性阻尼器包括齿轮齿条传动与锥齿轮换向系统、飞轮与电涡流阻尼系统;
技术总结
本发明属于结构消能减震(振)技术领域,涉及到一种单飞轮可重置惯性阻尼器,是一种可应用于小型结构或桥梁拉索结构中的被动减震(振)装置,用来抑制结构在地震作用或风荷载下的振动。该装置由齿轮齿条传动与锥齿轮换向系统、飞轮与电涡流阻尼系统配套实现。本发明保证了在结构往复运动过程中阻尼器在结构速度大小超越飞轮速度阶段提供惯性力和阻尼力,其余阶段不提供控制力,同时飞轮在该时间段内减速制动,使得结构往复运动时可以持续在加速阶段获得惯性力和阻尼力,以被动形式近似实现BangBang控制的性能。
技术研发人员:李芦钰,梁启刚,欧进萍,于德磊,白晓煜
受保护的技术使用者:大连理工大学
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!