AMT挡位位置控制方法、装置、电子设备及存储介质与流程
本发明涉及车辆控制,尤其涉及一种amt挡位位置控制方法、装置、电子设备及存储介质。
背景技术:
1、amt变速箱是在原有机械式手动变速箱基本结构不变的情况下,加装了电子单元的自动操控机构,取代了原来由驾驶人人工完成的离合器分离与接合、摘挡与挂挡以及发动机的转速与转矩的调节等操作,实现换挡过程的操纵自动化,给驾驶人带来了极大方便。
2、由于amt变速箱机械加工偏差和使用过程中磨损造成选换挡位移的改变等因素,需要增加自学习逻辑,增强一致性及产品寿命,此外,其机械部分的换档机构由于受气温变化及使用老化等原因的影响,使得选换挡电机对其位置控制的精度和响应速度也将有所降低,因此一段时间时就有必要对机械部分的极限位置参数作标定更新,以保证选换挡电机驱动的精度及快速响应。目前,amt变速箱下线时amt挡位位置自学习较耗费时间,同时使用学习到的极限值可能存在有换挡时间长的弊端。
技术实现思路
1、本发明提供了一种amt挡位位置控制方法、装置、电子设备及存储介质,以解决目前采用amt变速箱下线时进行amt挡位位置自学习较耗费时间,同时使用学习到的极限值可能存在有换挡时间长的弊端的问题。
2、根据本发明的一方面,提供了一种amt挡位位置控制方法,所述amt挡位位置控制方法包括:
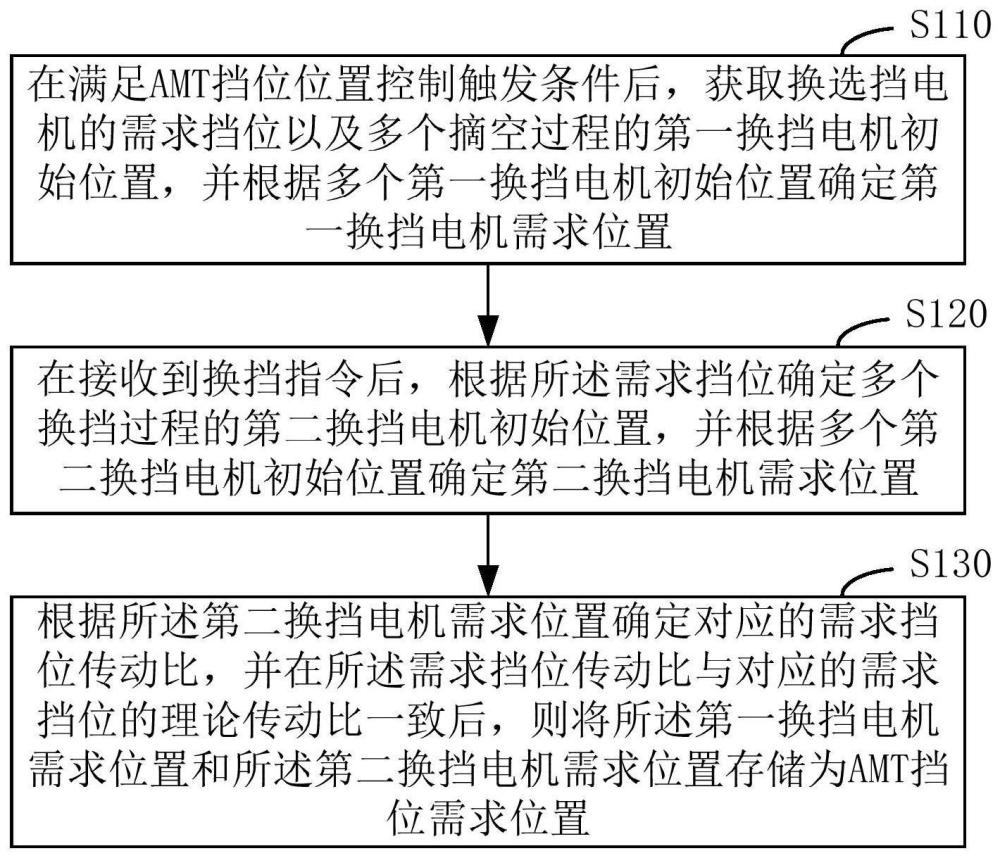
3、在满足amt挡位位置控制触发条件后,获取换选挡电机的需求挡位以及多个摘空过程的第一换挡电机初始位置,并根据多个第一换挡电机初始位置确定第一换挡电机需求位置;
4、在接收到换挡指令后,根据所述需求挡位确定多个换挡过程的第二换挡电机初始位置,并根据多个第二换挡电机初始位置确定第二换挡电机需求位置;
5、根据所述第二换挡电机需求位置确定对应的需求挡位传动比,并在所述需求挡位传动比与对应的需求挡位的理论传动比一致后,则将所述第一换挡电机需求位置和所述第二换挡电机需求位置存储为amt挡位需求位置。
6、可选的,所述amt挡位位置控制触发条件包括正常换挡操作次数执行超过设定换挡操作次数、或连续换挡操作失败次数超过设定失败操作次数、或存储的多个历史换挡电机位置的误差值超过设定位置阈值。
7、可选的,在获取换选挡电机的需求挡位以及多个摘空过程的第一换挡电机初始位置之前,还包括:
8、获取换挡电机的第一换挡极限位置、第二换挡极限位置和换挡中间位置,以及选档电机的第一选档极限位置、第二选档极限位置和选档中间位置;
9、获取多个摘空过程的第一换挡电机初始位置,包括:
10、在首次摘空过程中根据所述换挡中间位置确定第一换挡电机初始位置。
11、可选的,根据多个第一换挡电机初始位置确定第一换挡电机需求位置,包括:
12、若确定出多个第一换挡电机初始位置中最大换挡电机初始位置与最小换挡电机初始位置的差值处于设定位置差值范围内,则取多个第一换挡电机初始位置的平均值作为第一换挡电机需求位置;
13、若确定出多个第一换挡电机初始位置中最大换挡电机初始位置与最小换挡电机初始位置的差值未处于设定位置差值范围内,则记录一次第一换挡电机需求位置校验失败。
14、可选的,所述amt挡位位置控制方法还包括:
15、统计第一换挡电机需求位置校验失败的次数;
16、在所述次数超过设定次数阈值,则将第一换挡电机默认位置作为第一换挡电机需求位置。
17、可选的,根据所述第二换挡电机需求位置确定对应的需求挡位传动比,包括:
18、根据所述第二换挡电机需求位置确定当前输出轴转速和当前输入轴转速,并根据所述当前输出轴转速和所述当前输入轴转速确定所述第二换挡电机需求位置对应的需求挡位传动比。
19、可选的,所述amt挡位位置控制方法还包括:
20、在所述需求挡位传动比与对应的需求挡位的理论传动比不一致时,则生成摘空指令,以根据所述摘空指令执行摘空操作。
21、根据本发明的另一方面,提供了一种amt挡位位置控制装置,所述amt挡位位置控制装置包括:
22、第一换挡电机需求位置确定模块,用于执行在满足amt挡位位置控制触发条件后,获取换选挡电机的需求挡位以及多个摘空过程的第一换挡电机初始位置,并根据多个第一换挡电机初始位置确定第一换挡电机需求位置;
23、第二换挡电机需求位置确定模块,用于执行在接收到换挡指令后,根据所述需求挡位确定多个换挡过程的第二换挡电机初始位置,并根据多个第二换挡电机初始位置确定第二换挡电机需求位置;
24、amt挡位位置控制模块,用于执行根据所述第二换挡电机需求位置确定对应的需求挡位传动比,并在所述需求挡位传动比与对应的需求挡位的理论传动比一致后,则将所述第一换挡电机需求位置和所述第二换挡电机需求位置存储为amt挡位需求位置。
25、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
26、至少一个处理器;以及,
27、与所述至少一个处理器通信连接的存储器;其中,
28、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的amt挡位位置控制方法。
29、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的amt挡位位置控制方法。
30、本发明实施例的技术方案,通过在满足amt挡位位置控制触发条件后,获取换选挡电机的需求挡位以及多个摘空过程的第一换挡电机初始位置,并根据多个第一换挡电机初始位置确定第一换挡电机需求位置;在接收到换挡指令后,根据所述需求挡位确定多个换挡过程的第二换挡电机初始位置,并根据多个第二换挡电机初始位置确定第二换挡电机需求位置;根据所述第二换挡电机需求位置确定对应的需求挡位传动比,并在所述需求挡位传动比与对应的需求挡位的理论传动比一致后,则将所述第一换挡电机需求位置和所述第二换挡电机需求位置存储为amt挡位需求位置。本发明解决了目前采用amt变速箱下线时进行amt挡位位置自学习较耗费时间,同时使用学习到的极限值可能存在有换挡时间长的弊端的问题,实现对amt选换挡电机的各个控制位置进行精确自学习,增强软件覆盖度和amt零部件使用寿命。
31、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种amt挡位位置控制方法,其特征在于,包括:
2.根据权利要求1所述的amt挡位位置控制方法,其特征在于,所述amt挡位位置控制触发条件包括正常换挡操作次数执行超过设定换挡操作次数、或连续换挡操作失败次数超过设定失败操作次数、或存储的多个历史换挡电机位置的误差值超过设定位置阈值。
3.根据权利要求2所述的amt挡位位置控制方法,其特征在于,在获取换选挡电机的需求挡位以及多个摘空过程的第一换挡电机初始位置之前,还包括:
4.根据权利要求1所述的amt挡位位置控制方法,其特征在于,根据多个第一换挡电机初始位置确定第一换挡电机需求位置,包括:
5.根据权利要求4所述的amt挡位位置控制方法,其特征在于,所述amt挡位位置控制方法还包括:
6.根据权利要求1所述的amt挡位位置控制方法,其特征在于,根据所述第二换挡电机需求位置确定对应的需求挡位传动比,包括:
7.根据权利要求1所述的amt挡位位置控制方法,其特征在于,所述amt挡位位置控制方法还包括:
8.一种amt挡位位置控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的amt挡位位置控制方法。
技术总结
本发明公开了一种AMT挡位位置控制方法、装置、电子设备及存储介质。该AMT挡位位置控制方法包括:在满足AMT挡位位置控制触发条件后,获取换选挡电机的需求挡位以及多个摘空过程的第一换挡电机初始位置,并根据多个第一换挡电机初始位置确定第一换挡电机需求位置;根据需求挡位确定多个换挡过程的第二换挡电机初始位置,并根据多个第二换挡电机初始位置确定第二换挡电机需求位置;根据第二换挡电机需求位置确定对应的需求挡位传动比,并在需求挡位传动比与对应的需求挡位的理论传动比一致后,则将第一换挡电机需求位置和第二换挡电机需求位置存储为AMT挡位需求位置。本发明实现对AMT选换挡电机的各个控制位置进行精确自学习。
技术研发人员:赵国强
受保护的技术使用者:潍柴动力股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!