一种自适应螺旋驱动式管道缺陷检测机器人
本发明提供了一种自适应螺旋驱动式管道缺陷检测机器人,属于螺旋式机器人。
背景技术:
1、管道是现代工业和城市建设中重要的基础设施,用于输送各种液体、气体和固体颗粒等物质。随着管道使用年限的增长,管道内部可能出现腐蚀、结垢、堵塞等问题。这些问题会影响管道的正常使用,甚至可能导致环境污染、事故发生等严重后果。因此,对管道进行定期检测、维修和保养至关重要。
2、传统的管道检测方法主要包括人工目视检测、漏磁检测、超声检测等,这些方法在一定程度上能够发现管道问题,但存在检测效率低、准确性不足、无法进入狭小管道等缺点。
3、管道机器人是一种作业在狭小空间内的特种机器人,能够搭载多种不同类型传感器,具备数据分析、储存的能力,能够与远程控制台通信,且保持良好的姿态控制,可以对管道进行全方位、无死角的检测。但是目前使用的管道机器人至少还存在以下问题:
4、1、一般采用有线连接,作业时需要携带线缆进入管道,有线拖缆的方式供电时缆线在拖缆过程中摩擦会存在安全隐患;
5、2、缺乏对管道内环境的监测,使得监测结果不全面。
技术实现思路
1、本发明为了克服现有技术中存在的不足,所要解决的技术问题为:提供一种自适应螺旋驱动式管道缺陷检测机器人硬件结构的改进。
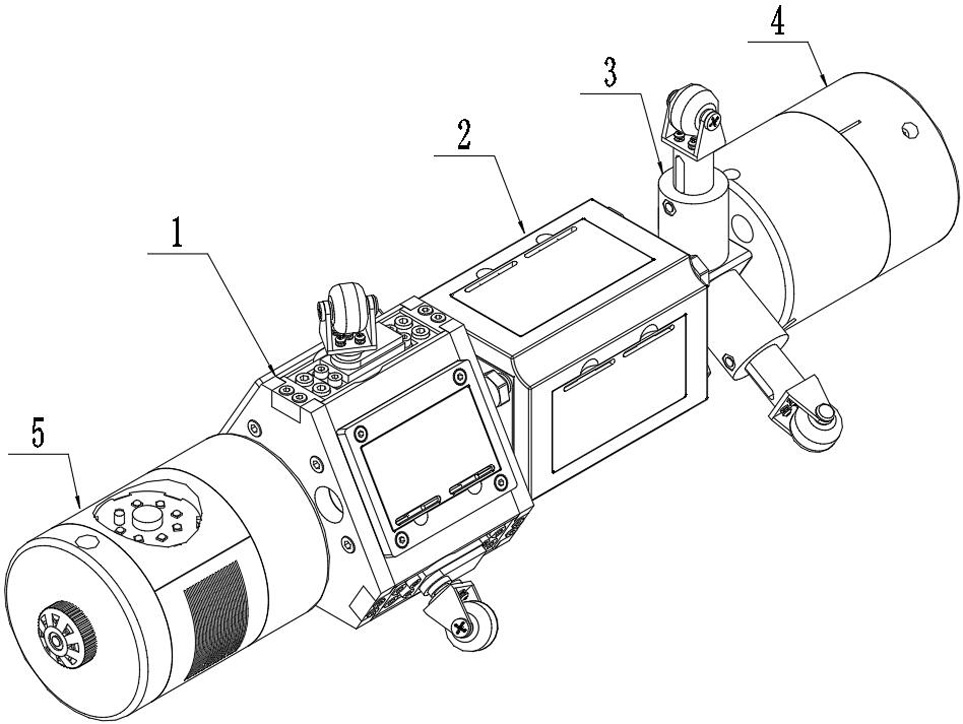
2、为了解决上述技术问题,本发明采用的技术方案为:一种自适应螺旋驱动式管道缺陷检测机器人,包括依次相连的前置检测模块、自适应支撑模块、驱动模块、螺旋运动模块和后置检测模块,所述前置检测模块和后置检测模块分别位于机器人的头尾,分别内置有控制模块、摄像头、无线传输模块和对管道内环境进行检测的传感器,其中前置检测模块用于对机器人进行导航和定位,后置检测模块用于采集管道内缺陷;
3、所述自适应支撑模块由三个自适应机构组成,三个自适应机构轴向120°安装在中心座上,自适应机构通过弹簧和升降机构实现主动适应不同管径的管道;
4、所述驱动模块用于为机器人提供牵引力,所述驱动模块内固定有牵引电机,所述牵引电机的四周分部有电池仓,电池仓内设置的锂电池用于为驱动模块和前置检测模块提供续航能力;
5、所述螺旋运动模块用于为机器人提供驱动力输出,螺旋运动模块的一端通过联轴器与驱动模块相连接,螺旋运动模块的另一端与后置检测模块固定连接,包括三个螺旋驱动模块和位于中心的驱动电机,三个螺旋驱动模块之间相互间隔120°,三个螺旋驱动模块的两两之间分别固定一个电池仓,电池仓内设置的锂电池用于为螺旋运动模块和后置检测模块提供续航能力;
6、其中每个螺旋驱动模块包括驱动轮和舵机,驱动轮通过轮架安装在舵机上,舵机通过第一螺栓与舵机安装架相连,舵机安装架的两端下方分别连接一根丝杠,丝杠上连接有丝杠螺母,丝杠的底端连接有同步轮,两个同步轮之间连接有同步带,两个同步轮分别固定在支撑座上,在舵机安装架的底端两侧分别分布两个第一弹簧来实现螺旋驱动模块对管道直径变化的适应,其中第一弹簧套在第一螺栓上,第一螺栓固定在舵机安装架两端;
7、所述驱动电机的输出轴与大锥齿轮固定连接,大锥齿轮上啮合有三个小锥齿轮,三个小锥齿轮分别与对应的同步轮相连。
8、所述自适应机构包括升降桶、升降柱和支撑轮,支撑轮通过第二螺栓安装在轮架上,轮架通过螺钉与升降柱相连,升降柱套在升降桶内,升降柱底部贯穿有子母螺丝,升降桶的底部固定在中心座上,升降桶内设置有第二弹簧,第二弹簧的一端固定在升降桶底部,第二弹簧的另一端与子母螺丝接触。
9、所述驱动模块包括固定在电机连接件和电机稳固件之间的牵引电机,在电机稳固件的四周固定有电机支撑件,牵引电机固定在电机支撑件之间,且牵引电机的底座与电机稳固件固定连接,同时通过连接杆将电机连接件与电机稳固件连接,并通过圆头螺母对连接杆的上下侧进行固定,同时圆头螺母上还设置有垫圈和平垫。
10、所述前置检测模块包括前置封装外壳和两侧的前置端盖,其中与自适应支撑模块相连的前置端盖上放置有前置蓝牙传输模块,位于外侧的前置端盖上设置有导航摄像头、前置测温传感器、前置测距传感器,在前置封装外壳的顶部设置有甲烷传感器,在前置封装外壳内部设置有前置检测电路板,前置检测电路板上集成有前置控制器,前置控制器通过导线分别与导航摄像头、前置测温传感器、前置测距传感器、甲烷传感器、前置蓝牙传输模块相连,用于实时监测管道内的缺陷、温度、气体浓度参数,机器人在运动过程中导航摄像头会不断输出图像,并通过相应的算法进行处理,以确定机器人在管道中的位置和方向。
11、所述后置检测模块包括后置封装外壳和两侧的后置端盖,在后置封装外壳上设置有检测摄像头、后置测温传感器、后置测距传感器和后置蓝牙传输模块,在外侧的后置端盖上设置有蜂鸣报警器,在后置封装外壳内部设置有后置检测电路板,后置检测电路板上集成有后置控制器,后置控制器通过导线分别与检测摄像头、蜂鸣报警器、后置测温传感器、后置测距传感器和后置蓝牙传输模块相连,检测摄像头在螺旋前进过程中,绕管道轴线不断旋转扫描。
12、所述驱动轮上设置有压力传感器,所述螺旋运动模块内设置有控制单元,所述控制单元分别通过导线与驱动电机的控制端、三个舵机的控制端和三个压力传感器相连,通过压力传感器对驱动轮与管道内壁的正压力进行实时采集。
13、本发明相对于现有技术具备的有益效果为:
14、1、高效:管道机器人可以在短时间内对大量管道进行检测,提高检测效率。
15、2、准确:内置多种传感器,实时监测管道状况,检测结果更为准确。
16、3、适应性强:管道机器人可以适应不同直径、形状和材质的管道,具有较强的通用性。
17、4、安全:避免了人工进入狭小、高温、有毒等恶劣环境,降低了作业风险。
18、5、实时监控:通过无线通信技术,不需要拖拽线缆,提高安全性,且管道机器人可以将检测数据实时传输至远程控制中心,便于实时监控和数据分析。
技术特征:
1.一种自适应螺旋驱动式管道缺陷检测机器人,其特征在于:包括依次相连的前置检测模块、自适应支撑模块、驱动模块、螺旋运动模块和后置检测模块,所述前置检测模块和后置检测模块分别位于机器人的头尾,分别内置有控制模块、摄像头、无线传输模块和对管道内环境进行检测的传感器,其中前置检测模块用于对机器人进行导航和定位,后置检测模块用于采集管道内缺陷;
2.根据权利要求1所述的一种自适应螺旋驱动式管道缺陷检测机器人,其特征在于:所述自适应机构包括升降桶、升降柱和支撑轮,支撑轮通过第二螺栓安装在轮架上,轮架通过螺钉与升降柱相连,升降柱套在升降桶内,升降柱底部贯穿有子母螺丝,升降桶的底部固定在中心座上,升降桶内设置有第二弹簧,第二弹簧的一端固定在升降桶底部,第二弹簧的另一端与子母螺丝接触。
3.根据权利要求1所述的一种自适应螺旋驱动式管道缺陷检测机器人,其特征在于:所述驱动模块包括固定在电机连接件和电机稳固件之间的牵引电机,在电机稳固件的四周固定有电机支撑件,牵引电机固定在电机支撑件之间,且牵引电机的底座与电机稳固件固定连接,同时通过连接杆将电机连接件与电机稳固件连接,并通过圆头螺母对连接杆的上下侧进行固定,同时圆头螺母上还设置有垫圈和平垫。
4.根据权利要求1所述的一种自适应螺旋驱动式管道缺陷检测机器人,其特征在于:所述前置检测模块包括前置封装外壳和两侧的前置端盖,其中与自适应支撑模块相连的前置端盖上放置有前置蓝牙传输模块,位于外侧的前置端盖上设置有导航摄像头、前置测温传感器、前置测距传感器,在前置封装外壳的顶部设置有甲烷传感器,在前置封装外壳内部设置有前置检测电路板,前置检测电路板上集成有前置控制器,前置控制器通过导线分别与导航摄像头、前置测温传感器、前置测距传感器、甲烷传感器、前置蓝牙传输模块相连,用于实时监测管道内的缺陷、温度、气体浓度参数,机器人在运动过程中导航摄像头会不断输出图像,并通过相应的算法进行处理,以确定机器人在管道中的位置和方向。
5.根据权利要求1所述的一种自适应螺旋驱动式管道缺陷检测机器人,其特征在于:所述后置检测模块包括后置封装外壳和两侧的后置端盖,在后置封装外壳上设置有检测摄像头、后置测温传感器、后置测距传感器和后置蓝牙传输模块,在外侧的后置端盖上设置有蜂鸣报警器,在后置封装外壳内部设置有后置检测电路板,后置检测电路板上集成有后置控制器,后置控制器通过导线分别与检测摄像头、蜂鸣报警器、后置测温传感器、后置测距传感器和后置蓝牙传输模块相连,检测摄像头在螺旋前进过程中,绕管道轴线不断旋转扫描。
6.根据权利要求1所述的一种自适应螺旋驱动式管道缺陷检测机器人,其特征在于:所述驱动轮上设置有压力传感器,所述螺旋运动模块内设置有控制单元,所述控制单元分别通过导线与驱动电机的控制端、三个舵机的控制端和三个压力传感器相连,通过压力传感器对驱动轮与管道内壁的正压力进行实时采集。
技术总结
本发明提供了一种自适应螺旋驱动式管道缺陷检测机器人,属于螺旋机器人技术领域;所要解决的技术问题为:提供一种自适应螺旋驱动式管道缺陷检测机器人硬件结构的改进;包括依次相连的前置检测模块、自适应支撑模块、驱动模块、螺旋运动模块和后置检测模块,前置检测模块和后置检测模块分别位于机器人的头尾,分别内置有控制模块、摄像头、无线传输模块和对管道内环境进行检测的传感器,其中前置检测模块用于对机器人进行导航和定位,后置检测模块用于采集管道内缺陷;自适应机构通过弹簧实现主动适应不同管径的管道;驱动模块用于为机器人提供牵引力;螺旋运动模块用于为机器人提供驱动力输出;本发明应用于管道缺陷检测。
技术研发人员:闫宏伟,赵鹏洋,何勃龙,寇子明,高贵军,牛海龙,常祺,卡迈勒·艾曼,王国锐,寇彦飞,焦少妮,严鹏飞,卫红梅,霍红,王彦栋
受保护的技术使用者:中北大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!