一种用于围岩分级机器人的激光扫描机构、机器人及方法
本发明属于围岩分级,尤其涉及一种用于围岩分级机器人的激光扫描机构、机器人及方法。
背景技术:
1、隧道围岩分级是选择施工方法的依据,是确定隧道结构荷载、支护形式与衬砌结构类型及尺寸的重要依据。隧道围岩分级主要根据围岩完整程度、破碎程度和地下水发育程度等指标将围岩划分为具有不同稳定程度的类别。在设计阶段,围岩分级是根据数量有限的钻孔和物理勘探获得的岩石指标结合设计人员的工程经验对围岩初步分级;施工阶段根据施工中所揭示的岩体情况进行动态分级设计。当前,研究隧道围岩分级方法主要分为间接方法和直接方法。其中,间接方法主要包括rqd方法、rmr方法和bq方法等。围岩分级从单因素逐渐发展为多因素表述方法,从定性描述逐步转化为定量的划分方式,近些年来发展为多种因素复合并加上了各种修正系数来评价。
2、围岩分级一般通过现场经验来确定,以此为基础进行相应的指标计算。围岩分级指标的获取方法通常包括掌子面地质素描、室内抗压试验和现场地质调查等方法。地质素描与室内试验耗时长、人工作业任务重,掌子面地质素描与现场地质调查等往往需要地质人员到现场掌子面进行岩石取样与素描,存在较大人身安全风险。同时,现场测试岩体强度后需要手动输入少量指标参数代入经验公式,难以全面、准确地描述隧道围岩的性能与状态。
3、发明人发现,为了解决传统围岩分级方法效率低、人工掌子面作业危险性高、人为因素影响较大的问题,相关研究中,通过采集洞壁和洞顶的图像,生成底图,在底图上测量结构面产状,在底图上选择测量区间,在所选择的测量区间内根据结构面产状测得岩体的体积节理数,根据体积节理数确定岩体的完整性系数,同时,采集多块岩石,并对岩石进行点荷载试验,获得岩石的单轴饱和抗压强度,然后根据岩体的完整性系数和岩石的单轴饱和抗压强度得到围岩的质量指标,根据质量指标确定围岩分级,可以达到提高围岩分级准确性的目的,但是,在利用摄像机或照相机采集洞壁和洞顶的图像时,因摄像机或照相机的不平稳以及对图像处理存在的误差,使得依据图像测量的结构面产状精度较低,导致根据结构面产状测得岩体的体积节理数精度较低,影响围岩分级精度和效果。
技术实现思路
1、本发明为了解决上述问题,提出了一种用于围岩分级机器人的激光扫描机构、机器人及方法,通过在激光扫描机构上设置粗调装置和精调装置,保证了采集点云数据的稳定性,避免了因摄像机或照相机的不平稳带来的误差,通过点云数据分析结构面产状,解决了依据图像测量结构面产状精度较低的问题。
2、为了实现上述目的,第一方面,本发明提供了一种用于围岩分级机器人的激光扫描机构,采用如下技术方案:
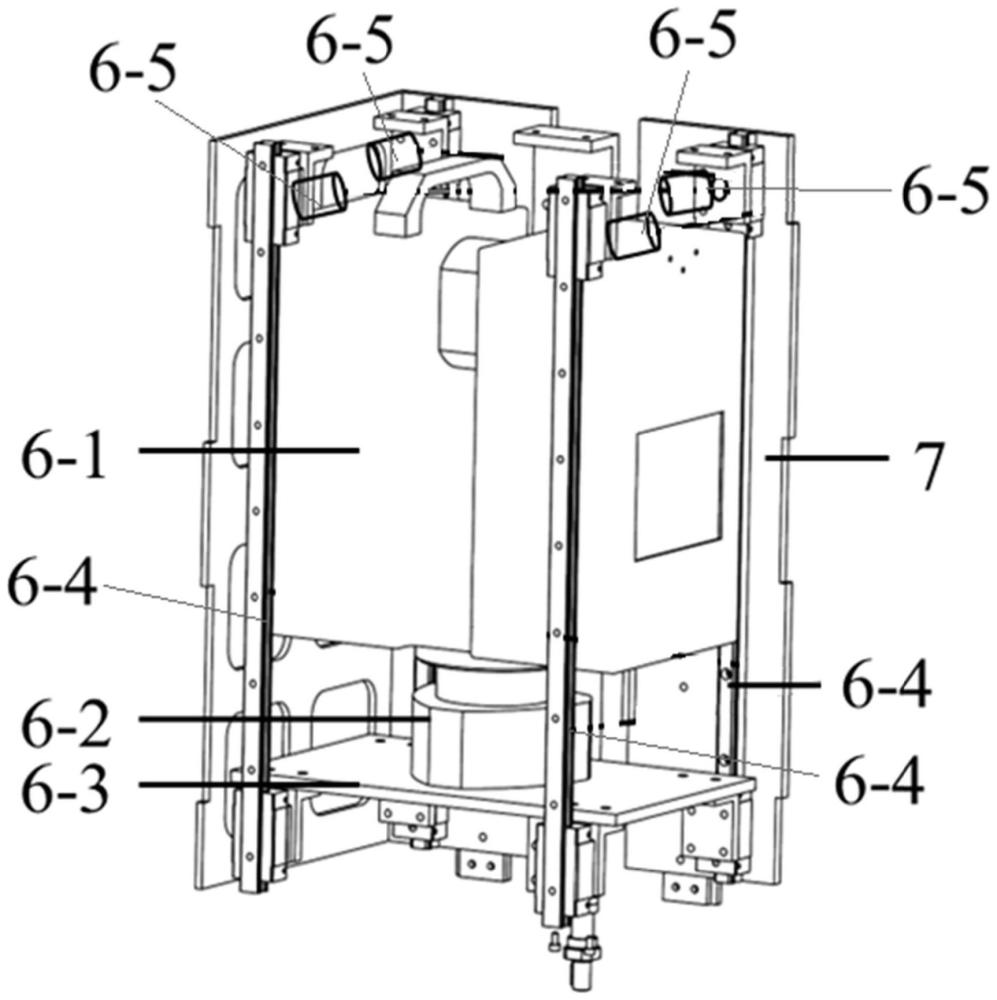
3、一种用于围岩分级机器人的激光扫描机构,包括:
4、提升装置;
5、设置在所述提升装置上的托举平台;
6、仪器调平底座设置在所述托举平台上;
7、三维激光扫描仪,固定在所述仪器调平底座上。
8、进一步的,所述提升装置为多个,均匀分布在所述托举平台的周向上。
9、为了实现上述目的,第二方面,本发明还提供了一种用于围岩分级机器人,采用如下技术方案:
10、一种围岩分级机器人,包括:
11、运载平台,两侧设置有履带行走机构;
12、防护装置,固定在所述运载平台上端;
13、如第一方面中所述的激光扫描机构,通过所述提升装置设置在所述防护装置上。
14、进一步的,所述履带行走机构包括支撑架以及设置在所述支撑架上的多个支重轮和多个导轮;多个支重轮和多个导轮上包裹有工程车带。
15、进一步的,所述支撑架下端设置多个支重轮,所述支撑架下侧设置的多个支重轮角度可调;所述支撑架一端设置有长度可调的导轮;所述支撑架上侧设置有角度可调的导轮。
16、进一步的,所述支重轮与所述支撑架之间设置有减震。
17、进一步的,所述运载平台上端通过机械臂设置有点荷载测试机构。
18、进一步的,所述点荷载测试机构包括与所述机械臂连接的测试反力支架、设置在所述测试反力支架一端的液压油缸、设置在所述液压油缸上的点荷载测试尖端以及设置在所述测试反力支架另一端的压力表。
19、进一步的,所述运载平台上还设置有摄像与监控云平台。
20、为了实现上述目的,第三方面,本发明还提供了一种围岩分级方法,采用如下技术方案:
21、一种用于围岩分级方法,采用了如第二方面中所述的围岩分级机器人,包括:
22、采用三维激光扫描仪,获取掌子面点云数据,依据掌子面点云数据,分析结构面产状,计算结构面走向与隧道洞轴线夹角,同时分析结构面迹长和宽度;
23、采用施密特投影法,开展结构面分组,采用分组结构面优势方向间距计算法得到结构面平均间距;
24、获取每组结构面沿法向每米长结构面的条数,计算岩体体积节理数,利用体积节理数和岩土完整性系数的关系,得到岩体完整性系数,进行岩体完整性评价;
25、测试岩石点荷载强度,并换算成岩石单轴抗压强度;基于岩石单轴抗压强度判定岩石坚硬程度;
26、获取掌子面照片,判别围岩岩性、地下水赋存状态、围岩风化程度、结构面结合程度和结构面发育程度信息,得到地下水影响修正系数、主要软弱结构面产状影响修正系数和初始应力状态影响修正系数;
27、基于岩体完整性系数和岩石单轴抗压强度,计算岩体质量指标值,并结合地下水影响修正系数、主要软弱结构面产状影响修正系数和初始应力状态影响修正系数,得到修正[bq]值;
28、基于修正[bq]值划分围岩等级。
29、与现有技术相比,本发明的有益效果为:
30、1、本发明中,通过在托举平台和三维激光扫描仪之间设置仪器调平底座实现了在激光扫描机构的精准调平,保证了采集点云数据的稳定性,避免了因摄像机或照相机的不平稳带来的误差,通过三维激光扫描仪获取点云数据来分析结构面产状,解决了依据图像测量结构面产状精度较低的问题;
31、2、本发明中首先采用三维激光扫描仪,获取掌子面点云数据,依据掌子面点云数据,分析结构面产状,计算结构面走向与隧道洞轴线夹角,同时分析结构面迹长和宽度;然后采用施密特投影法,开展结构面分组,采用分组结构面优势方向间距计算法得到结构面平均间距;最后获取每组结构面沿法向每米长结构面的条数,计算岩体体积节理数,利用体积节理数和岩土完整性系数的关系,得到岩体完整性系数,进行岩体完整性评价;通过三维激光扫描仪获取点云数据来分析结构面产状,解决了依据图像测量结构面产状精度较低的问题。
技术特征:
1.一种用于围岩分级机器人的激光扫描机构,其特征在于,包括:
2.如权利要求1所述的一种用于围岩分级机器人的激光扫描机构,其特征在于,所述提升装置为多个,均匀分布在所述托举平台的周向上。
3.一种围岩分级机器人,其特征在于,包括:
4.如权利要求3所述的一种围岩分级机器人,其特征在于,所述履带行走机构包括支撑架以及设置在所述支撑架上的多个支重轮和多个导轮;多个支重轮和多个导轮上包裹有工程车带。
5.如权利要求4所述的一种围岩分级机器人,其特征在于,所述支撑架下端设置多个支重轮,所述支撑架下侧设置的多个支重轮角度可调;所述支撑架一端设置有长度可调的导轮;所述支撑架上侧设置有角度可调的导轮。
6.如权利要求4所述的一种围岩分级机器人,其特征在于,所述支重轮与所述支撑架之间设置有减震。
7.如权利要求3所述的一种围岩分级机器人,其特征在于,所述运载平台上端通过机械臂设置有点荷载测试机构。
8.如权利要求7所述的一种围岩分级机器人,其特征在于,所述点荷载测试机构包括与所述机械臂连接的测试反力支架、设置在所述测试反力支架一端的液压油缸、设置在所述液压油缸上的点荷载测试尖端以及设置在所述测试反力支架另一端的压力表。
9.如权利要求4所述的一种围岩分级机器人,其特征在于,所述运载平台上还设置有摄像与监控云平台。
10.一种用于围岩分级方法,其特征在于,采用了如权利要求3-9任一项所述的围岩分级机器人,包括:
技术总结
本发明属于围岩分级技术领域,提出了一种用于围岩分级机器人的激光扫描机构、机器人及方法,包括:提升装置;设置在所述提升装置上的托举平台;第二调节装置,设置在所述托举平台上;仪器调平底座,与所述第二调节装置连接;三维激光扫描仪,固定在所述仪器调平底座上;本发明中,通过在托举平台和三维激光扫描仪之间设置仪器调平底座和第二调节装置,实现了在激光扫描机构的粗调和精调,保证了采集点云数据的稳定性,避免了因摄像机或照相机的不平稳带来的误差,通过三维激光扫描仪获取点云数据来分析结构面产状,解决了依据图像测量结构面产状精度较低的问题。
技术研发人员:屠文锋,周宗青,刘洪亮,成帅,高成路,杨钧岩,孙毅,涂汉臣,刘雨函
受保护的技术使用者:山东大学
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!