一种主动、半主动粘滞流体阻尼器及其控制方法与流程
本发明属于液压阻尼器,具体涉及一种主动、半主动粘滞流体阻尼器及其控制方法。
背景技术:
1、地震是一种突发性、毁灭性的自然灾害,它对人类社会构成严重威胁。如何减少工程结构在地震中遭受的损害,是一个现实而又重大的问题。对于传统的结构抗震方法,往往是通过结构自身的强度、刚度、变形能力、耗能能力来达到抵御地震的目的,但是这种通过结构自身弹塑性变形来耗散地震能量的方式会给工程结构带来损伤。目前,可以通过在工程结构的特定部位加入特定减隔震系统,由其与结构共同抵御外界动荷载作用,改变或调整结构的动力特性或动力反应,使工程结构在地震和风作用下的动力反应(加速度、速度、位移)得到合理的控制,从而保证工程结构的安全,这是积极主动的结构抗震对策。消能减震技术是在结构中设置消能装置,通过其局部变形提供附加阻尼,以消耗输入上部结构的地震能量,达到预期设防要求。
2、目前,全世界已有大量的工程使用粘滞流体阻尼器来减少结构或设备的震动。粘滞流体阻尼器的基本原理是:结构在地震(或风)力的作用下,与结构共同工作的粘滞流体阻尼器的活塞杆受力,推动活塞运动,活塞两边的高粘性阻尼介质产生压力差,使阻尼介质通过活塞上的阻尼孔,从而产生阻尼力,将结构振动的部分能量通过粘滞流体阻尼器中阻尼介质的粘滞耗能耗散掉,达到减小结构振动(地震或风振)反应的目的。
3、但是由于目前粘滞流体阻尼器的阻尼孔设置于活塞上,因阻尼孔的长度决定了阻尼器的力学参数,故导致活塞往往长度很大,这样也增大了阻尼器的长度。
技术实现思路
1、本发明为了解决传统的粘滞流体阻尼器的力学参数提高时伴随阻尼器的长度增大的问题。
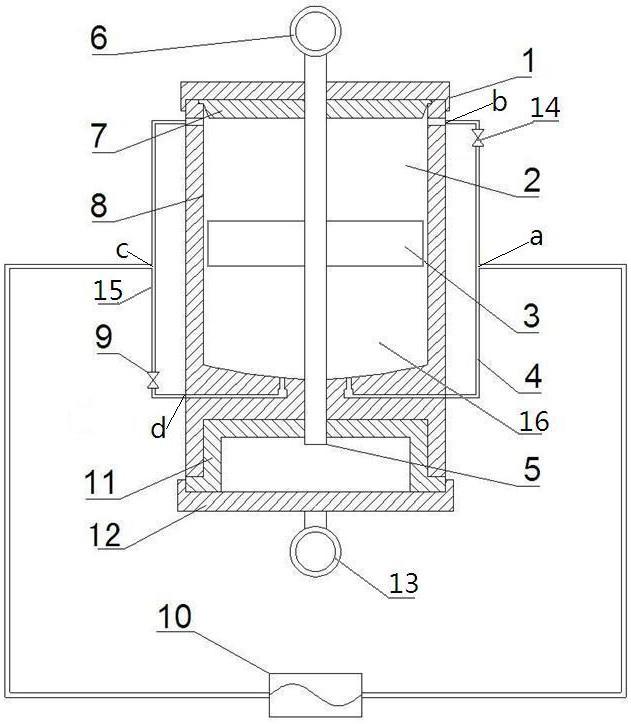
2、本发明提供了如下技术方案:一种主动、半主动粘滞流体阻尼器,包括缸筒、活塞杆和活塞;活塞杆穿过缸筒的流体空间以可直线位移的方式与缸筒密封接触,流体空间内填充阻尼液;活塞安装在活塞杆上将缸筒的流体空间沿活塞杆位移方向分隔为第一腔体和第二腔体,第一腔体和第二腔体通过缸筒内的阻尼通道和旁通阻尼孔导通,旁通阻尼孔包括分别设置于缸筒两相对端的第一阻尼孔和第二阻尼孔,第一阻尼孔和第二阻尼孔分别与补偿油路连接形成压力调节回路;补偿油路包括泵,第一阻尼孔与补偿油路的第一接入节点和第一阻尼孔与第一腔体的第二接入节点之间安装第一可调节逆止阀,第二阻尼孔与补偿油路的第三接入节点和第二阻尼孔与第二腔体的第四接入节点之间安装第二可调节逆止阀。
3、进一步地,阻尼通道构造在活塞上或活塞与缸筒之间。
4、进一步地,缸筒包括缸体、缸盖和端盖,缸盖封闭缸体的第一端围成流体空间,活塞杆滑动密封保持在缸盖和缸体的导孔内,端盖连接在缸体的第二端用于遮蔽活塞杆,活塞杆的外露端连接上耳环,端盖上连接下耳环。
5、进一步地,阻尼液是硅油。
6、一种主动、半主动粘滞流体阻尼器的控制方法,主动、半主动粘滞流体阻尼器装配在相互接近或背离的一对结构之间,在这一对结构接近或背离时施加主动或半主动控制力;一对结构包括待减振结构和固定结构,当待减振结构实际发生振动超过其振动限值时,补偿油路开始工作,施加主动控制力;当待减振结构实际发生振动低于其振动限值时,补偿油路停止工作,施加半主动控制力。
7、进一步地,施加主动控制力时为主动控制状态,主动控制状态下,第一可调节逆止阀和第二可调节逆止阀完全关闭,补偿油路根据待减振结构动态反馈实时泵送阻尼液,产生与待减振结构运动同向的主动制动力;
8、施加半主动控制力时为半主动控制状态,半主动控制状态下,补偿油路停止工作,分别调节第一可调节逆止阀和第二可调节逆止阀改变第一阻尼孔和第二阻尼孔的流量调节阻尼器的输出力。
9、进一步地,主动控制状态下,通过控制算法生成阻尼器的最优主动控制力,以最优主动控制力作为控制目标,确定补偿油路中泵的泵油压力和流量;
10、采用以下代数式计算阻尼器的最优主动控制力;
11、
12、
13、式中,和分别表示待减振结构的位移和速度,和分别表示状态空间方程的系统矩阵和控制矩阵,表示最优主动控制力,是控制算法的控制增益;
14、采用以下代数式计算;
15、;
16、其中,p为解黎卡提方程的正定解,解黎卡提方程为:
17、;
18、其中和表示控制算法中的质量系数和能耗系数,为系统矩阵的转置,为控制矩阵的转置。
19、进一步地,半主动控制状态下,第一可调节逆止阀和第二可调节逆止阀在待减振结构绝对速度与相对速度同向时处于关闭状态,迫使所有阻尼液在缸筒内阻尼通道中流动,此时阻尼器输出其最大出力;当待减振结构绝对速度与相对速度异向时,第一可调节逆止阀和第二可调节逆止阀打开,阻尼液同时在旁通阻尼孔和缸筒内阻尼通道中流动,随着第一可调节逆止阀和第二可调节逆止阀的开启范围增大,阻尼器的输出力逐渐减小,第一可调节逆止阀和第二可调节逆止阀完全打开时阻尼器输出其最小出力。
20、与现有技术相比,本发明的优势在于:
21、本发明提供的一种主动、半主动粘滞流体阻尼器,具有较好的兼容性,面对不同的待减振结构可实现不同的控制方案。当待减振结构实际发生振动超过振动限值时,补偿油路开始工作,发挥主动控制作用,产生主动控制效果;当待减振结构振动低于该振动限值时,补偿油路停止工作,发挥半主动控制效果。且主动、半主动粘滞流体阻尼器具有简单、坚固的结构,不易损坏和失效,可以长期保持稳定和可靠的性能。
22、本发明的主动、半主动粘滞流体阻尼器是在装置两端设置装有可调节逆止阀的旁通阻尼孔,不仅大大提高了装置的阻尼效率,而且有效地缩短了装置的长度。并且在阻尼孔上设置有可调节逆止阀,可以通过控制可调节逆止阀实现调节出力。此外主动、半主动粘滞流体阻尼器可以适用于各种类型的结构,包括建筑、桥梁、机械设备等,具有广泛的应用前景。
技术特征:
1.一种主动、半主动粘滞流体阻尼器,其特征在于:包括缸筒、活塞杆(5)和活塞(3);活塞杆(5)穿过缸筒的流体空间以可直线位移的方式与缸筒密封接触,流体空间内填充阻尼液;活塞(3)安装在活塞杆(5)上将缸筒的流体空间沿活塞杆(5)位移方向分隔为第一腔体(2)和第二腔体(16),第一腔体(2)和第二腔体(16)通过缸筒内的阻尼通道和旁通阻尼孔导通,旁通阻尼孔包括分别设置于缸筒两相对端的第一阻尼孔(4)和第二阻尼孔(15),第一阻尼孔(4)和第二阻尼孔(15)分别与补偿油路(10)连接形成压力调节回路;补偿油路(10)包括泵,第一阻尼孔(4)与补偿油路(10)的第一接入节点(a)和第一阻尼孔(4)与第一腔体(2)的第二接入节点(b)之间安装第一可调节逆止阀(14),第二阻尼孔(15)与补偿油路(10)的第三接入节点(c)和第二阻尼孔(15)与第二腔体(16)的第四接入节点(d)之间安装第二可调节逆止阀(9)。
2.根据权利要求1所述的一种主动、半主动粘滞流体阻尼器,其特征在于:所述的阻尼通道构造在活塞(3)上或活塞(3)与缸筒之间。
3.根据权利要求2所述的一种主动、半主动粘滞流体阻尼器,其特征在于:所述的缸筒包括缸体(8)、缸盖(1)和端盖(12),缸盖(1)封闭缸体(8)的第一端围成流体空间,活塞杆(5)滑动密封保持在缸盖(1)和缸体(8)的导孔内,端盖(12)连接在缸体(8)的第二端用于遮蔽活塞杆(5),活塞杆(5)的外露端连接上耳环(6),端盖(12)上连接下耳环(13)。
4.根据权利要求1所述的一种主动、半主动粘滞流体阻尼器,其特征在于:所述的阻尼液是硅油。
5.一种主动、半主动粘滞流体阻尼器的控制方法,其特征在于:所述主动、半主动粘滞流体阻尼器装配在相互接近或背离的一对结构之间,在这一对结构接近或背离时施加主动或半主动控制力;所述的一对结构包括待减振结构和固定结构,当待减振结构实际发生振动超过其振动限值时,补偿油路开始工作,施加主动控制力;当待减振结构实际发生振动低于其振动限值时,补偿油路停止工作,施加半主动控制力。
6.根据权利要求5所述的一种主动、半主动粘滞流体阻尼器的控制方法,其特征在于:
7.根据权利要求6所述的一种主动、半主动粘滞流体阻尼器的控制方法,其特征在于:主动控制状态下,通过控制算法生成阻尼器的最优主动控制力,以最优主动控制力作为控制目标,确定补偿油路(10)中泵的泵油压力和流量;
8.根据权利要求6所述的一种主动、半主动粘滞流体阻尼器的控制方法,其特征在于:半主动控制状态下,第一可调节逆止阀(14)和第二可调节逆止阀(9)在待减振结构绝对速度与相对速度同向时处于关闭状态,迫使所有阻尼液在缸筒内阻尼通道中流动,此时阻尼器输出其最大出力;当待减振结构绝对速度与相对速度异向时,第一可调节逆止阀(14)和第二可调节逆止阀(9)打开,阻尼液同时在旁通阻尼孔和缸筒内阻尼通道中流动,随着第一可调节逆止阀(14)和第二可调节逆止阀(9)的开启范围增大,阻尼器的输出力逐渐减小,第一可调节逆止阀(14)和第二可调节逆止阀(9)完全打开时阻尼器输出其最小出力。
技术总结
本发明属于液压阻尼器技术领域,具体涉及一种主动、半主动粘滞流体阻尼器及其控制方法;包括缸筒、活塞杆和活塞;活塞杆穿过缸筒的流体空间以可直线位移的方式与缸筒密封接触;活塞安装在活塞杆上将缸筒的流体空间沿活塞杆位移方向分隔为第一腔体和第二腔体,第一腔体和第二腔体通过缸筒内的阻尼通道和旁通阻尼孔导通,旁通阻尼孔包括分别设置于缸筒两相对端的第一阻尼孔和第二阻尼孔,第一阻尼孔和第二阻尼孔分别与补偿油路连接形成压力调节回路;控制方法是,当待减振结构实际发生振动超过其振动限值时,补偿油路开始工作,施加主动控制力;当待减振结构实际发生振动低于其振动限值时,补偿油路停止工作,施加半主动控制力。
技术研发人员:和玉利,张玉卿,罗志文,祁增涛,许艳伟,孙胜,马骎骥,张永涛,徐兴双,王剑,蔺伟楠,汪志昊,郑伟涛,宋海文,王鹏飞,梁瑞东,韩晓明,张润林,仲启强,李璐,李玉梅,高峰
受保护的技术使用者:中铁三局集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!