一种管线探测平台的制作方法
本发明涉及燃气,尤其是涉及一种管线探测平台。
背景技术:
1、管线探测仪能在不破坏地面覆土的情况下,快速准确地探测出地下自来水管道、金属管道、电缆等的位置、走向、深度及钢质管道防腐层破损点的位置和大小;燃气管网大部分都是地埋式,因此在施工或维护时,需要通过管线探测仪查找管线的位置,以便于后续的施工维护,防止在开挖时损坏燃气管道,但现有的管线探测仪通常是工作人员手持探测,如此不但需要花费大量时间进行管线的测量,而且由于离地有一定距离,探测精度不高。公开号为cn105372714a,公开了一种管线探测仪,该管线探测仪包括探测仪主体,探测仪主体上端设有控制屏和手柄,下端设有钢管和探测头,所述钢管底端设有伸缩机械臂,机械臂端部设有探测头,钢管底部设有机械臂储藏室,探测仪主体上端设有调控手轮。改进后的管线探测仪便携轻巧,使用方便,探测头灵活伸缩可调节,便于使用者的舒适工作,有效提高工作效率。该管线探测仪为手持式,无法自动检测,检测效率不高。
技术实现思路
1、针对现有技术的不足,本发明的目的在于提供一种探测精度高、自动化程度高的管线探测平台。
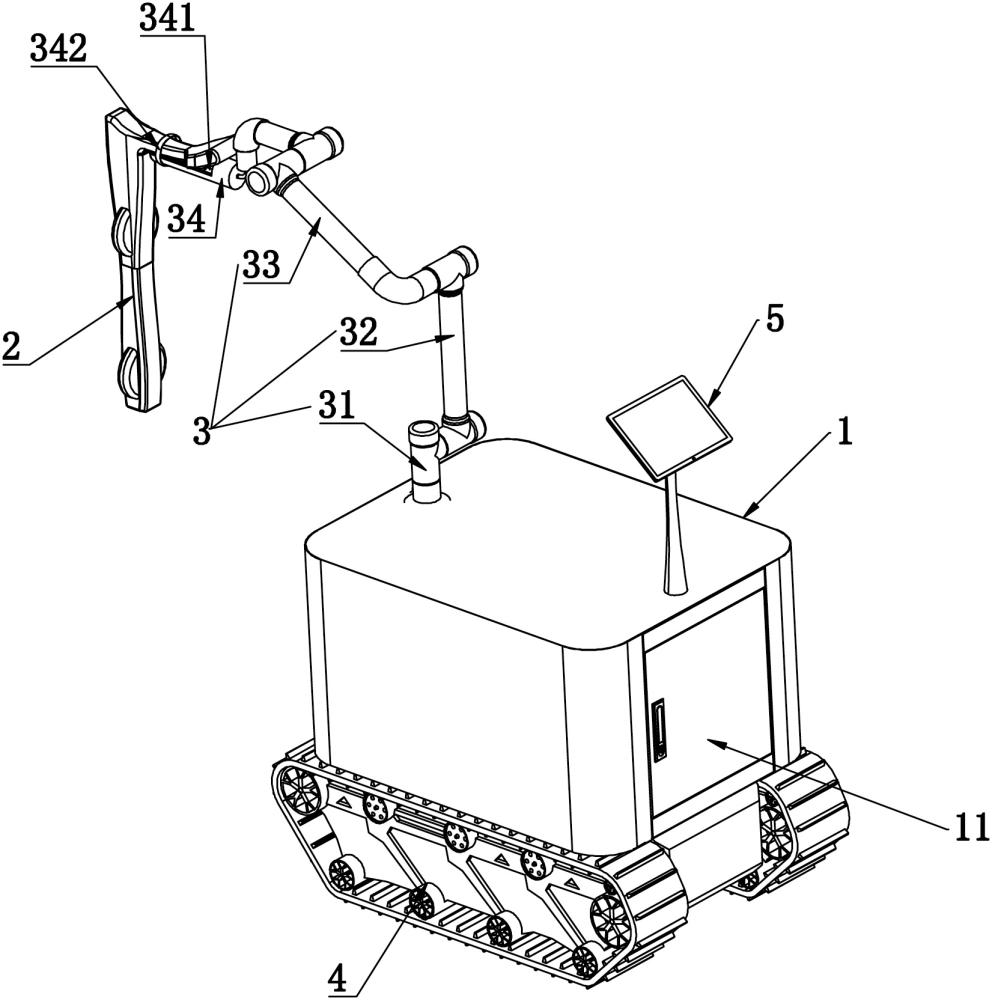
2、为实现上述目的,本发明提供的方案为:一种管线探测平台,包括箱体、管线探测仪、机械臂、无人车、供电模块、终端平台,所述箱体内设置所述供电模块,所述供电模块用于对机械臂、无人车与终端平台供电,所述机械臂铰接于箱体顶部,所述机械臂连接管体探测仪用于带动管线探测仪移动至设定探测位置,所述管线探测仪用于探测管线参数的,所述无人车设置于箱体底部,所述无人车用于带动箱体移动,所述终端平台用于接收管线探测仪发送的管线参数并控制机械臂与无人车。
3、本发明的有益效果为:实现自动探测管线,该平台通过设置无人车,实现带动整个探测平台移动,以沿管线移动,然后通过设置机械臂与管线探测仪,机械臂带动管线探测仪移动,利用管线探测仪对管线进行全方位探测扫描,从而精确探测管线的三维数据,再通过设置终端平台,以根据管线探测仪发送的管线参数并控制机械臂与无人车,实现将管线三维数据自动生产管线三维数据图,从而使工作人员精确获知地下管线的位置等参数,整体结构实用可靠,自动化程度高,无需过多操作。
4、进一步地,所述终端平台内设置有人机交互界面,所述人机交互界面用于操作控制机械臂与无人车。
5、进一步地,所述供电模块包括电池。本发明采用上述结构后,实现向机械臂、无人车、终端平台供电。
6、进一步地,所述无人车为履带式无人车。本发明采用上述结构后,可在不稳定的地形上行走。
7、进一步地,所述机械臂包括第一摆臂、第二摆臂、第三摆臂,所述第一摆臂一端铰接于箱体顶部,另一端铰接第二摆臂,所述第二摆臂铰接第三摆臂,所述第三摆臂连接管线探测仪。本发明采用上述结构后,实现带动管线探测仪上下左右旋转摆动。
8、进一步地,所述箱体侧壁上铰接有箱门。
9、进一步地,所述探测平台探测管线的方法包括以下步骤:
10、s1.管线探测仪探测管线参数,然后发送至终端平台;
11、s2.终端平台的人机交互界面接收并对管线参数进行处理,以定位探测平台所处的位置,然后根据探测平台的位置发送操作指令。
12、s3.根据操作指令控制无人车移动与机械臂摆动,以带动管线探测仪进行下一步管线定位及深度测量,然后将管线三维数据反馈至终端平台;
13、s4.人机交互界面建立三维坐标系,将管线三维数据自动生产管线三维数据图。
14、本发明通过管线探测仪探测到管线相关参数后,将信息传输给人机交互界面,然后人机交互界面对数据进行处理,并将相关命令信号输送给无人车和机械臂,无人车和机械臂进行行驶和摆动,进行下一步管线定位及深度测量,如此通过自动驾驶和测量自动生产管线三维数据图,使本发明可快速准确探测地下管线的位置,并能自动沿管线行走测量,测量后还能在人机交互界面自动生产管线三维数据图,整个过程快速,能精确探测管线位置与参数,以便于工作人员确定燃气管线的情况。
15、进一步地,所述步骤s2中,人机交互界面中对管线参数的处理包括收集、记录、分类、判断。
16、进一步地,所述无人车用于带动探测平台前后移动,所述机械臂用于带动管线探测仪左右旋转摆动与上下旋转摆动。
技术特征:
1.一种管线探测平台,包括箱体(1)、管线探测仪(2)、机械臂(3)、无人车(4)、供电模块、终端平台(5),其特征在于:所述箱体(1)内设置所述供电模块,所述供电模块用于对机械臂(3)、无人车(4)与终端平台(5)供电,所述机械臂(3)铰接于箱体(1)顶部,所述机械臂(3)连接管体探测仪用于带动管线探测仪(2)移动至设定探测位置,所述管线探测仪(2)用于探测管线参数的,所述无人车(4)设置于箱体(1)底部,所述无人车(4)用于带动箱体(1)移动,所述终端平台(5)与管线探测仪(2)通讯连接,所述终端平台(5)用于接收管线探测仪(2)发送的管线参数并控制机械臂(3)与无人车(4)。
2.根据权利要求1所述的一种管线探测平台,其特征在于:所述终端平台(5)内设置有人机交互界面,所述人机交互界面用于操作控制机械臂(3)与无人车(4)。
3.根据权利要求1所述的一种管线探测平台,其特征在于:所述供电模块包括电池。
4.根据权利要求1所述的一种管线探测平台,其特征在于:所述无人车(4)为履带式无人车(4)。
5.根据权利要求1所述的一种管线探测平台,其特征在于:所述机械臂(3)包括第一摆臂(31)、第二摆臂(32)、第三摆臂(33),所述第一摆臂(31)一端铰接于箱体(1)顶部,另一端铰接第二摆臂(32),所述第二摆臂(32)铰接第三摆臂(33),所述第三摆臂(33)连接管线探测仪(2)。
6.根据权利要求1所述的一种管线探测平台,其特征在于:所述探测平台探测管线的方法包括以下步骤:
7.根据权利要求6所述的一种管线探测平台,其特征在于:所述步骤s2中,人机交互界面中对管线参数的处理包括收集、记录、分类、判断。
技术总结
本发明公开了一种管线探测平台,包括箱体、管线探测仪、机械臂、无人车、供电模块、终端平台,所述箱体内设置所述供电模块,所述供电模块用于对机械臂、无人车与终端平台供电;该平台通过设置无人车,实现带动整个探测平台移动,以沿管线移动,然后通过设置机械臂与管线探测仪,机械臂带动管线探测仪移动,利用管线探测仪对管线进行全方位探测扫描,从而精确探测管线的三维数据,再通过设置终端平台,以根据管线探测仪发送的管线参数并控制机械臂与无人车,实现将管线三维数据自动生产管线三维数据图,从而使工作人员精确获知地下管线的位置等参数,整体结构实用可靠,自动化程度高,无需过多操作。
技术研发人员:张蔚男,杜志聪,孙磊,苏元龙,李子荣,陈洪,刘军朋,李启隆
受保护的技术使用者:佛山市高明能源有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!