一种自平衡调节阻力的折叠支臂的制作方法
本发明涉及仪器支臂,具体为一种自平衡调节阻力的折叠支臂。
背景技术:
1、很多仪器、设备在应用到不同场合时往往需要借助支臂的辅助才能更好的完成工作,支臂的作用在于可以起到调节仪器、设备工作时的高度和方位,以便于工作时的操作需求,而要达到这样的使用需求,最基本的要求是支臂需要具备有折叠、转动关节,这样才能实现调向,甚至对于那些工作场景时效性较短、且操作较为频繁的工作环境,还进一步要求支臂要具有完美的灵活性和稳定性,例如医疗操作室内的仪器设备,对支臂的性能要求非常之高。
2、然而,现在较为常见的支架大多在主要关节上都会加装动力驱动装置,例如气缸或者转动电机,而在一些辅助关节上便简单的通过阻尼片实现转动定位,加装动力驱动装置确实能给操作带来一定的便捷性,但是也存在成本高、偶然性失灵、且需要通过开关控制增加操作难度这些缺陷,并不能起到理想的辅助作用,而通过阻尼片实现转动定位更加不现实,不但会随着阻尼片老损失去使用价值,其负载承受力也会受到很大的限制。
技术实现思路
1、本发明的目的在于提供一种自平衡调节阻力的折叠支臂,通过自平衡臂可以实现傻瓜式随意调节,不但操作便捷、制造成本低,而且在使用过程中稳定有保障,还能根据不同的负载重量需求灵活调节负载支撑力的范围,适用性非常强,解决了上述背景技术提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种自平衡调节阻力的折叠支臂,包括自平衡臂,所述自平衡臂包括第一错位支架、铰接件、第二错位支架、第一弹性件和第二弹性件,所述铰接件上并排设置有两个铰接通孔,所述第一错位支架两端分别定义为第一铰接端和第二铰接端,所述第二错位支架两端分别定义为第三铰接端和第四铰接端,所述第一铰接端通过铰接件与第三铰接端铰接,所述第二铰接端通过铰接件与第四铰接端铰接,所述第一错位支架通过铰接件可实现相对第二错位支架平移滑动,所述第一错位支架上偏向第一铰接端设置第一对接件,所述第一错位支架上偏向第二铰接端设置第二对接件,所述第二错位支架上偏向第三铰接端设置第三对接件,所述第二错位支架上偏向第四铰接端设置第四对接件,所述第二弹性件一端连接于第一对接件上,另一端连接于第四对接件上,所述第一弹性件一端连接于第二对接件上,另一端连接于第三对接件上,当所述自平衡臂处于初始定位形态时,所述第一弹性件在第二对接件和第三对接件之间产生牵引拉力,所述第二弹性件在第一对接件和第四对接件之间形成推力,所述牵引拉力与推力之间形成的差值用于使第一错位支架相对第二错位支架产生平移趋势以抵消自平衡臂上端连接的负载对第一错位支架相对第二错位支架形成的逆向平移趋势,以维持自平衡臂处于静止定位状态。
3、优选地,所述第一弹性件和第二弹性件均为弹簧,所述弹簧弹性系数相同。
4、优选地,所述自平衡臂下端连接有支臂底座,所述支臂底座包括支臂铰接座,所述支臂铰接座上设置有两个铰接通孔,所述第二铰接端和第四铰接端通过轴栓分别与支臂铰接座铰接。
5、优选地,所述自平衡臂上端通过折叠连接件转动连接有微调臂,所述折叠连接件上设置有铰接通孔,所述第一铰接端和第三铰接端通过轴栓分别与折叠连接件一端铰接,所述微调臂连接于折叠连接件另一端上。
6、优选地,所述微调臂包括两平行错位盘,所述两平行错位盘相互平行设置于微调臂左右两侧,且两平行错位盘之间端部两两相向设置,相向设置两端部之间通过轴栓实现铰接形成长方形框架,所述长方形框架一端与折叠连接件铰接,另一端通过转向连接机构转动连接有仪器连接座,所述仪器连接座与折叠连接件之间设置有气动推件。
7、优选地,所述折叠连接件靠近微调臂所在一端设置有第一推杆铰接座,所述转向连接机构上设置有第二推杆铰接座,所述气动推件一端铰接于第一推杆铰接座上,另一端铰接于第二推杆铰接座上。
8、优选地,所述平行错位盘包括两相互平行设置的滑杆,所述两相互平行设置的滑杆两端均通过铰接件铰接。
9、优选地,所述自平衡臂外围罩设有平衡臂外壳,所述平衡臂外壳包括相互盖合连接的平衡臂上壳和平衡臂下壳。
10、优选地,所述微调臂外围罩设有微调臂外壳,所述微调臂外壳包括相互盖合连接的微调臂上壳和微调臂下壳。
11、优选地,所述第一铰接端、第二铰接端、第三铰接端和第四铰接端与轴栓之间均夹设有微调阻尼件。
12、与现有技术相比,本发明的有益效果是:
13、本发明,通过自平衡臂可以实现傻瓜式随意调节,不但操作便捷、制造成本低,而且在使用过程中稳定有保障,还能根据不同的负载重量需求灵活调节负载支撑力的范围,适用性非常强。
技术特征:
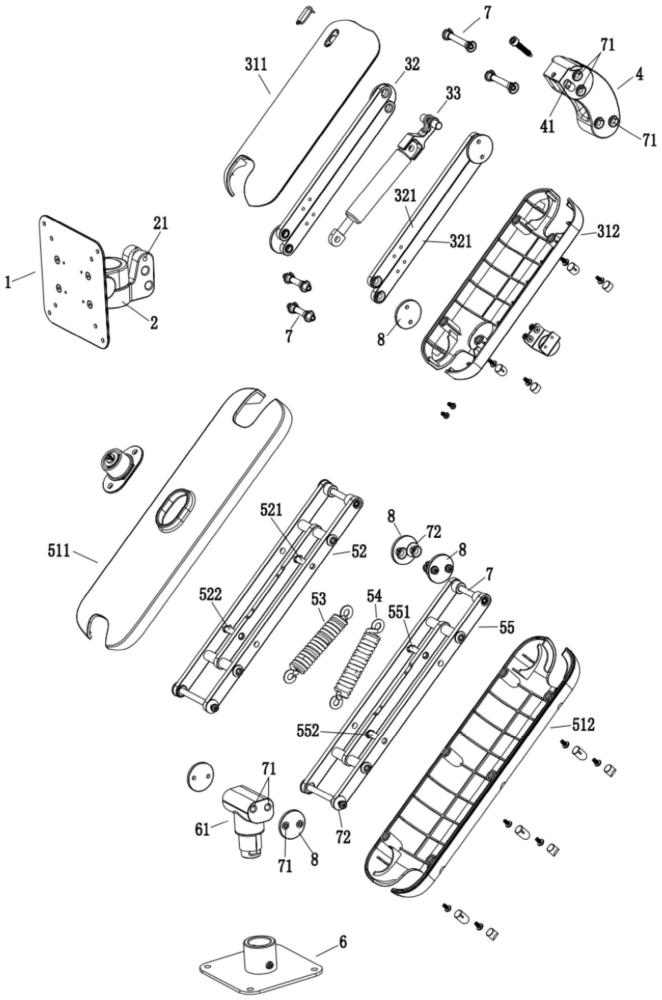
1.一种自平衡调节阻力的折叠支臂,其特征在于:包括自平衡臂(5),所述自平衡臂(5)包括第一错位支架(52)、铰接件(8)、第二错位支架(55)、第一弹性件(53)和第二弹性件(54),所述铰接件(8)上并排设置有两个铰接通孔(71),所述第一错位支架(52)两端分别定义为第一铰接端和第二铰接端,所述第二错位支架(55)两端分别定义为第三铰接端和第四铰接端,所述第一铰接端通过铰接件(8)与第三铰接端铰接,所述第二铰接端通过铰接件(8)与第四铰接端铰接,所述第一错位支架(52)通过铰接件(8)可实现相对第二错位支架(55)平移滑动,所述第一错位支架(52)上偏向第一铰接端设置第一对接件(521),所述第一错位支架(52)上偏向第二铰接端设置第二对接件(522),所述第二错位支架(55)上偏向第三铰接端设置第三对接件(551),所述第二错位支架(55)上偏向第四铰接端设置第四对接件(552),所述第二弹性件(54)一端连接于第一对接件(521)上,另一端连接于第四对接件(552)上,所述第一弹性件(53)一端连接于第二对接件(522)上,另一端连接于第三对接件(551)上,当所述自平衡臂(5)处于初始定位形态时,所述第一弹性件(53)在第二对接件(522)和第三对接件(551)之间产生牵引拉力,所述第二弹性件(54)在第一对接件(521)和第四对接件(552)之间形成推力,所述牵引拉力与推力之间形成的差值用于使第一错位支架(52)相对第二错位支架(55)产生平移趋势以抵消自平衡臂(5)上端连接的负载对第一错位支架(52)相对第二错位支架(55)形成的逆向平移趋势,以维持自平衡臂(5)处于静止定位状态。
2.根据权利要求1所述的一种自平衡调节阻力的折叠支臂,其特征在于:所述第一弹性件(53)和第二弹性件(54)均为弹簧,所述弹簧弹性系数相同。
3.根据权利要求1所述的一种自平衡调节阻力的折叠支臂,其特征在于:所述自平衡臂(5)下端连接有支臂底座(6),所述支臂底座(6)包括支臂铰接座(61),所述支臂铰接座(61)上设置有两个铰接通孔(71),所述第二铰接端和第四铰接端通过轴栓(7)分别与支臂铰接座(61)铰接。
4.根据权利要求1所述的一种自平衡调节阻力的折叠支臂,其特征在于:所述自平衡臂(5)上端通过折叠连接件(4)转动连接有微调臂(3),所述折叠连接件(4)上设置有铰接通孔(71),所述第一铰接端和第三铰接端通过轴栓(7)分别与折叠连接件(4)一端铰接,所述微调臂(3)连接于折叠连接件(4)另一端上。
5.根据权利要求4所述的一种自平衡调节阻力的折叠支臂,其特征在于:所述微调臂(3)包括两平行错位盘(32),所述两平行错位盘(32)相互平行设置于微调臂(3)左右两侧,且两平行错位盘(32)之间端部两两相向设置,相向设置两端部之间通过轴栓(7)实现铰接形成长方形框架,所述长方形框架一端与折叠连接件(4)铰接,另一端通过转向连接机构(2)转动连接有仪器连接座(1),所述仪器连接座(1)与折叠连接件(4)之间设置有气动推件(33)。
6.根据权利要求5所述的一种自平衡调节阻力的折叠支臂,其特征在于:所述折叠连接件(4)靠近微调臂(3)所在一端设置有第一推杆铰接座(41),所述转向连接机构(2)上设置有第二推杆铰接座(21),所述气动推件(33)一端铰接于第一推杆铰接座(41)上,另一端铰接于第二推杆铰接座(21)上。
7.根据权利要求5所述的一种自平衡调节阻力的折叠支臂,其特征在于:所述平行错位盘(32)包括两相互平行设置的滑杆(321),所述两相互平行设置的滑杆(321)两端均通过铰接件(8)铰接。
8.根据权利要求1、3、4任何一项所述的一种自平衡调节阻力的折叠支臂,其特征在于:所述自平衡臂(5)外围罩设有平衡臂外壳(51),所述平衡臂外壳(51)包括相互盖合连接的平衡臂上壳(511)和平衡臂下壳(512)。
9.根据权利要求4、5、6任何一项所述的一种自平衡调节阻力的折叠支臂,其特征在于:所述微调臂(3)外围罩设有微调臂外壳(31),所述微调臂外壳(31)包括相互盖合连接的微调臂上壳(311)和微调臂下壳(312)。
10.根据权利要求1所述的一种自平衡调节阻力的折叠支臂,其特征在于:所述第一铰接端、第二铰接端、第三铰接端和第四铰接端与轴栓(7)之间均夹设有微调阻尼件(72)。
技术总结
本发明公开了一种自平衡调节阻力的折叠支臂,自平衡臂包括第一错位支架、铰接件、第二错位支架、第一弹性件和第二弹性件,所述第一弹性件在第一错位支架和第二错位支架之间产生牵引拉力,所述第二弹性件在第一错位支架和第二错位支架之间形成推力,所述牵引拉力与推力之间形成的差值用于使第一错位支架相对第二错位支架产生平移趋势以抵消自平衡臂上端连接的负载对第一错位支架相对第二错位支架形成的逆向平移趋势,以维持自平衡臂处于静止定位状态,本发明,通过自平衡臂可以实现傻瓜式随意调节,不但操作便捷、制造成本低,而且在使用过程中稳定有保障,还能根据不同的负载重量需求灵活调节负载支撑力的范围,适用性非常强。
技术研发人员:胡永年
受保护的技术使用者:深圳繁简工业设计有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!