一种多功能柔性铰链的制作方法
本技术涉及半导体加工设备,特别是涉及一种多功能柔性铰链。
背景技术:
1、现有技术下的运动平台大多采用刚性件装配而成,譬如用于实现x、y轴两自由度运动的位移台,大多采用丝杆滑块相配合的方式设计,以此方式设计的位移台,由于刚性件装配后会存在响应滞后、装配间隙大、零件之间容易磨损等缺点,因此使得以此方式装配而成的位移台精度和寿命都大大降低。
2、而柔性铰链作为通过材料自身的弹性弯曲形变来实现高精度的相对运动的器件,具有无摩擦损耗、无需润滑、无迟滞、无需维护、结构紧凑、易于制造等优点。但是,现有技术下用于半导体生产的基于柔性铰链的位移台,受制于各自由度之间的解耦要求,大多功能较为单一,很难同时满足多种应用场景的使用。
3、因此,本领域技术人员致力于开发一种可满足在x、y两自由度运动、及在rz自由度旋转的多功能柔性铰链。
技术实现思路
1、有鉴于现有技术的上述缺陷,本实用新型公开了一种多功能柔性铰链,所要解决的技术问题是提供一种可满足在x、y两自由度运动、及在rz自由度旋转的多功能柔性铰链。
2、为实现上述目的,本实用新型提供了一种多功能柔性铰链,包括
3、承载板,所述承载板的下底面中部设置有轴孔,所述轴孔与外部支撑轴配合;
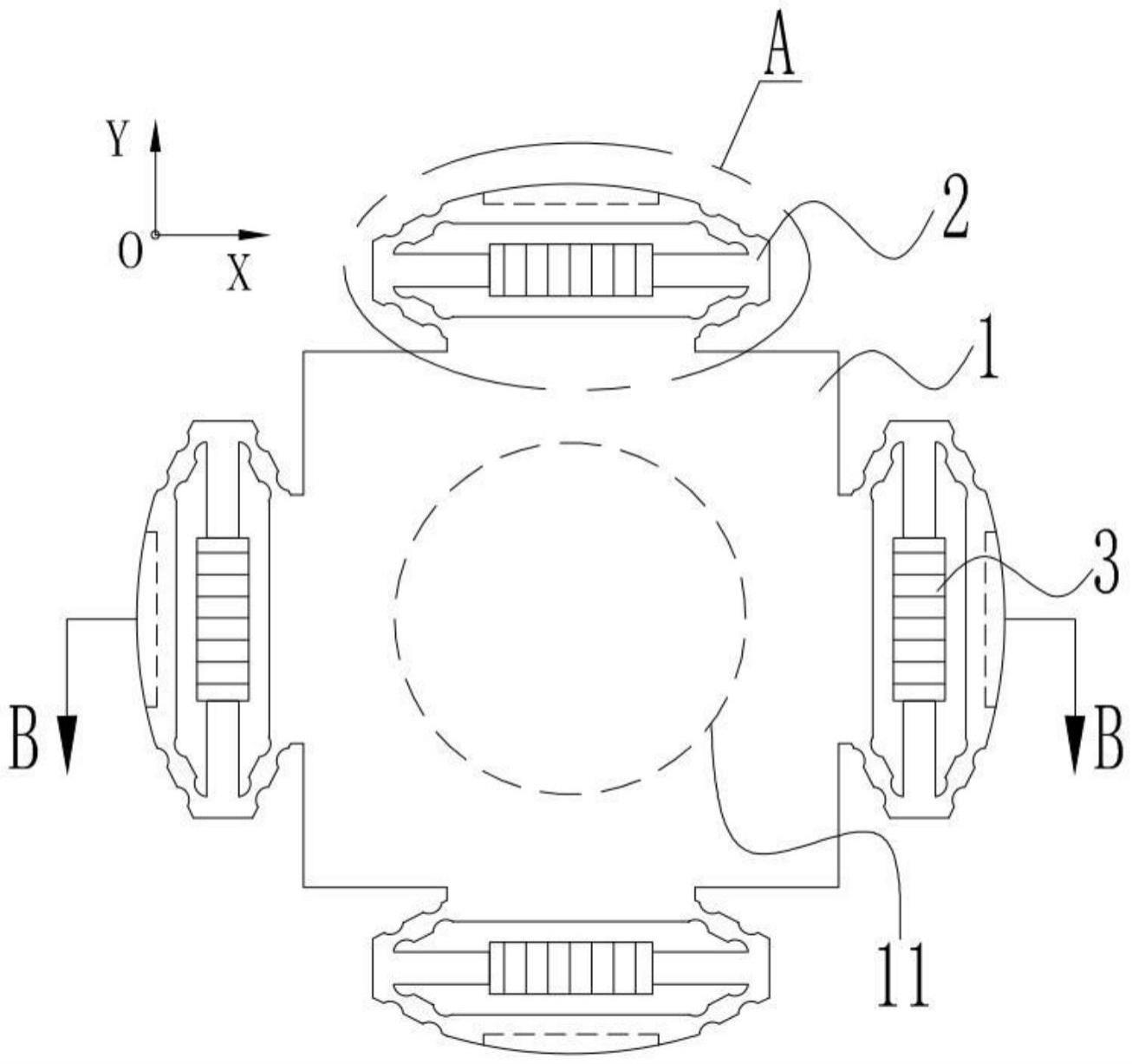
4、柔性放大铰链,周向均布于所述承载板的四周且两两对称设置,并用于驱动所述承载板沿x、y或rz三自由度运动;多个所述柔性放大铰链远离所述承载板的一侧壁均设置有便于和定位件配合的限位部;
5、当所述轴孔与外部支撑轴配合时,受多个所述柔性放大铰链的作用,所述承载板绕rz转动;
6、当所述限位部和所述定位件配合时,受多个所述柔性放大铰链的作用,所述承载板沿x、y方向运动。
7、优选的,所述柔性放大铰链包括间隔设置的第一连接臂和第二连接臂,所述第一连接臂和第二连接臂的两端分别夹角对称设置有直圆柔性铰链,每端的所述直圆柔性铰链的夹角处均向内延伸有安装座,两个所述安装座之间安装有压电致动器。
8、通过柔性放大铰链的结构设计,在第一连接臂和第二连接臂的两端分别夹角对称设置直圆柔性铰链,当需要满足承载板在x向、y向两自由度运动时,可通过定位件的外力将分布于承载板四周的柔性放大铰链的限位部固定,再通过沿x向和y向设置的压电致动器的伸缩,驱使直圆柔性铰链产生形变,第一连接臂和第二连接臂相互靠近或远离,以此驱使承载板沿x向或y向运动。当需要满足承载板在rz自由度的旋转时,使各柔性放大铰链处于自由状态,并使承载板安装轴承可自由转动,当压电致动器基于逆压电效应产生轴向伸长时,使柔性放大铰链相对于定位轴产生切向位移,继而带动承载板绕定位轴旋转,实现rz自由度的旋转。
9、优选的,所述第一连接臂外延于所述承载板的板边且与板边一体设置,所述第二连接臂与第一连接臂相平行。所述限位部为第二连接臂外侧开设的限位槽,可以通过将外设的定位件卡入限位槽,将分布于承载板四周的柔性放大铰链的外侧壁固定。
10、以此结构设置的柔性放大铰链由于成对设置的两直圆柔性铰链之间呈一定夹角设置,因此能够将压电致动器伸缩时产生的位移利用两端成对设置的直圆柔性铰链成倍放大或成倍缩小,以此进一步的驱动承载板运动。
11、优选的,所述承载板的形状为正方形,四个所述柔性放大铰链设置于承载板的边部,每个所述安装座均与承载板的板边平行。
12、优选的,所述轴孔的孔径大于等于d/2,小于d,其中d为所述承载板的边长。轴孔内安装所述精密轴承,精密轴承的直径过小无法使承载板自由转动,可能还会造成转动的不稳定,精密轴承的直径过大会造成成本的增加。
13、优选的,所述轴孔内埋设有精密轴承,所述精密轴承的轴承孔与外部支撑轴配合。当需要满足承载板在rz自由度的旋转时,精密轴承与下方的支撑轴配合,使得承载板得以无阻碍的自由转动。
14、优选的,所述第一连接臂和第二连接臂两端的直圆柔性铰链间的夹角θ的大小均为50~60°,通过夹角大小的设计,使得柔性铰链放大或缩小位移达到更好的效果。
15、优选的,所述第一连接臂和第二连接臂每端的所述直圆柔性铰链由四个拉伸缺口型单轴柔性铰链对称设置,且两端的拉伸缺口型单轴柔性铰链的柔性缺口的壁厚分别为d1和d2。
16、优选的,所述d1和d2的大小相同。当需要满足承载板在x向、y向两自由度运动时,为了使得柔性放大铰链产生的驱动力垂直作用于承载板的侧壁,此时,柔性放大铰链两端成对设置的直圆柔性铰链结构可设置成完全相同,且两端成对设置的直圆柔性铰链对称设置于压电致动器的两端,每对直圆柔性铰链中的两个直圆柔性铰链沿压电致动器的轴向对称设置。当x轴方向上的两压电致动器在电控装置的作用下驱动压电致动器工作时,压电致动器基于逆压电效应产生轴向伸长,以此驱动两端的直圆柔性铰链产生形变,继而驱动承载板沿x轴方向运动,反之,当y轴方向上的两压电致动器工作时,又可以驱动承载板沿y轴方向运动。
17、优选的,所述d1与d2的比值d1/d2的取值范围为0.1~0.9。当需要满足承载板在rz自由度的旋转时,为了能够进一步的提升柔性放大铰链驱动承载板旋转时的切向力,本方案中的柔性放大铰链两端成对设置的直圆柔性铰链结构并非完全相同。本方案中的d1/d2的取值优选0.5,以此通过两对直圆柔性铰链之间的刚度差异,在压电致动器的驱动作用下产生一定的切向位移,加之直圆柔性铰链对压电致动器的驱动力具有一定的放大作用,因此能够更好的增加承载板的切向位移量,继而驱使承载板绕z定位轴顺畅的旋转一定角度。
18、进一步的,为了方便加工,减少因装配带来的误差,同时又能提升本多功能柔性铰链运动时的稳定性,柔性放大铰链与承载板均采用al7075材质线切割一体加工成型,al7075材质具有良好的机械性能,比较适用于柔性铰链的制作。
19、本实用新型的有益效果是:
20、通过承载板和柔性放大铰链的结构设计,既能够通过轴孔和外部支撑轴配合实现rz自由度的旋转,又能够通过限位部和定位件配合,满足x、y方向的位移,继而满足两种不同工况下的使用。采用本实用新型方案设计的多功能柔性铰链,相对于刚性装配体运动机构,不仅结构简单,而且功能多样,易于加工且成本低,响应速度快,能够满足不同工况下工件的位置调节。
技术特征:
1.一种多功能柔性铰链,其特征在于:包括
2.如权利要求1所述的多功能柔性铰链,其特征在于:所述柔性放大铰链(2)包括间隔设置的第一连接臂(21)和第二连接臂(22),所述第一连接臂(21)和第二连接臂(22)的两端分别夹角对称设置有直圆柔性铰链(23),每端的所述直圆柔性铰链(23)的夹角处均向内延伸有安装座(24),两个所述安装座(24)之间安装有压电致动器(3)。
3.如权利要求2所述的多功能柔性铰链,其特征在于:所述第一连接臂(21)外延于所述承载板(1)的板边且与板边一体设置,所述第二连接臂(22)与第一连接臂(21)相平行。
4.如权利要求3所述的多功能柔性铰链,其特征在于:所述承载板(1)的形状为正方形,四个所述柔性放大铰链(2)设置于承载板(1)的边部,每个所述安装座(24)均与承载板(1)的板边平行。
5.如权利要求4所述的多功能柔性铰链,其特征在于:所述轴孔(11)的孔径大于等于d/2,小于d,其中d为所述承载板(1)的边长。
6.如权利要求1所述的多功能柔性铰链,其特征在于:所述轴孔(11)内埋设有精密轴承(12),所述精密轴承(12)的轴承孔与外部支撑轴配合。
7.如权利要求2所述的多功能柔性铰链,其特征在于:所述第一连接臂(21)和第二连接臂(22)两端的直圆柔性铰链(23)间的夹角θ的大小均为50~60°。
8.如权利要求7所述的多功能柔性铰链,其特征在于:所述第一连接臂(21)和第二连接臂(22)每端的所述直圆柔性铰链(23)由四个拉伸缺口型单轴柔性铰链(231)对称设置,且两端的拉伸缺口型单轴柔性铰链(231)的柔性缺口的壁厚分别为d1和d2。
9.如权利要求8所述的多功能柔性铰链,其特征在于:所述d1和d2的大小相同。
10.如权利要求8所述的多功能柔性铰链,其特征在于:所述d1与d2的比值d1/d2的取值范围为0.1~0.9。
技术总结
本技术公开了一种多功能柔性铰链,包括承载板,承载板的下底面中部设置有轴孔,轴孔与外部支撑轴配合;柔性放大铰链,周向均布于承载板的四周且两两对称设置,并用于驱动承载板沿X、Y或Rz三自由度运动;多个柔性放大铰链远离承载板的一侧壁均设置有便于和定位件配合的限位部;当轴孔与外部支撑轴配合时,受多个柔性放大铰链的作用,承载板绕Rz转动;当限位部和定位件配合时,受多个柔性放大铰链的作用,承载板沿X、Y方向运动。本技术解决的技术问题是致力于开发一种可满足在X、Y两自由度运动、及在Rz自由度旋转的多功能柔性铰链。
技术研发人员:娄飞
受保护的技术使用者:深圳市雕拓科技有限公司
技术研发日:20230110
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!