一种自适应管道机器人单元及其管道机器人
本技术公开涉及管道机器人的,尤其涉及一种自适应管道机器人单元及其管道机器人。
背景技术:
1、海洋油气集输管道,作为海上油气田生产的重要设施,具有高风险与高投入的特点。随着海洋管道铺设长度的延长和运行时间的增加,发生事故的几率也越来越大,而海洋管道所输送的原油与天然气对周围的环境与人体都有危害,一旦海洋管道发生破坏或泄漏,就会对附近的人员与环境产生严重威胁,轻则导致海洋油气管道发生泄漏浪费资源,重则会由于天然气或原油的泄漏而引发爆炸,造成严重的财产损失和人员伤亡,并对周围的生态环境产生严重的破坏。
2、越来越多的海洋管道损伤事故表明,对海洋管道的安全性,可靠性的研宄具有重要的意义。因此,有必要针对海洋油气管道的情况进行定时或定期的检测,这不仅能降低经济上的损失,而且避免了油气资源的泄漏,对减少环境污染具有重要意义。
3、管道机器人是管道检测用重要工具,依靠在管道机器人上安装不同的传感器进行管道的性能检测。由于现有管道机器人中轮子相对于机器人主体的位置是相对固定的,因此对于工作环境要求较高,在进行管道内部作业时要求管道内径足够大,管径大小不能有明显的变化,管道弯曲角度要很小,适应性差,不利于检测作业。
4、因此,是否可研发一种新型的管道机器人,以解决上述问题,成为人们亟待解决的问题。
技术实现思路
1、鉴于此,本实用新型公开了一种自适应管道机器人单元及其管道机器人,以解决以往的管道机器人对于管道内部的工作环境要求较高、适应能力差的问题。
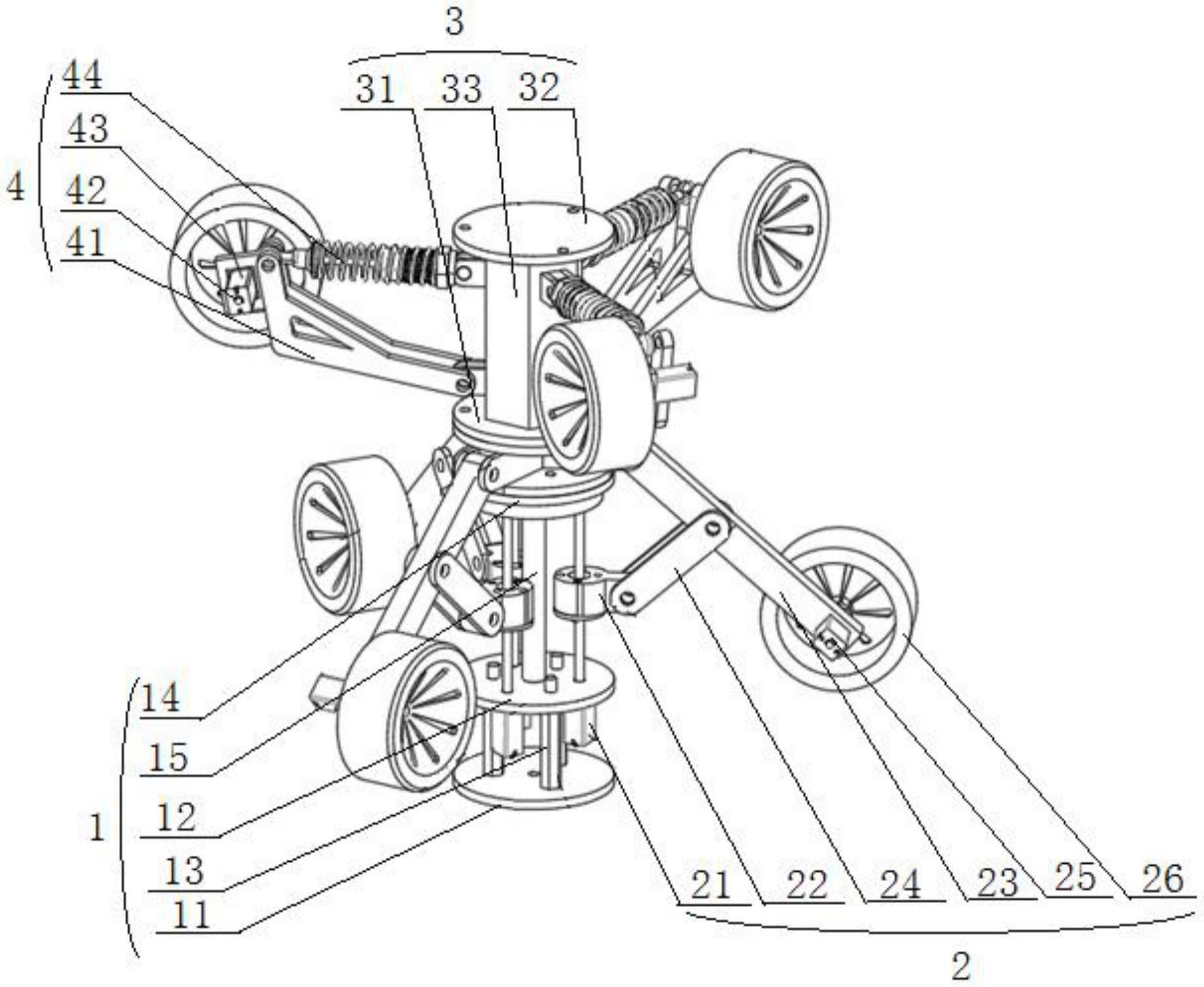
2、一方面,本实用新型提供了一种自适应管道机器人单元,该管道机器人单元包括:第一支撑机构、多个主动爬行机构、第二支撑机构以及多个从动爬行机构;
3、所述第一支撑机构包括:第一固定板、第二固定板、多个第一支撑柱、第三固定板以及第二支撑柱;
4、所述第一固定板、第二固定板以及第三固定板依次间隔平行设置,在所述第二固定板上沿周向间隔设置有多个通孔;
5、多个所述第一支撑柱均设置在所述第一固定板和所述第二固定板之间,每个所述第一支撑柱均一端与所述第一固定板固定连接,另一端与所述第二固定板固定连接;
6、所述第二支撑柱设置在所述第二固定板与所述第三固定板之间,所述第二支撑柱一端与所述第二固定板固定连接,另一端与所述第三固定板固定连接;
7、所述主动爬行机构与所述第二固定板上的通孔一一对应,每个所述主动爬行机构均包括:丝杆电机、丝杆螺母、主动轮支撑杆、连接杆、主动轮电机以及主动轮;
8、所述丝杆电机安装在所述第一固定板与所述第二固定板之间,且所述丝杆电机中的丝杆穿过所述第二固定板上对应的通孔后,端部与所述第三固定板转动连接;
9、所述丝杆螺母位于所述第二固定板与所述第三固定板之间,套装在所述丝杆电机的丝杆外部;
10、所述主动轮支撑杆的上端与所述第三固定板转动连接;
11、所述连接杆一端与所述丝杆螺母转动连接,另一端与所述主动轮支撑杆的中部转动连接;
12、所述主动轮电机与所述主动轮支撑杆的下端固定连接;
13、所述主动轮与所述主动轮电机的输出端驱动连接;
14、所述第二支撑机构包括:第四支撑板、第五支撑板以及第三支撑柱;
15、所述第四支撑板与所述第五支撑板间隔平行设置,且所述第四支撑板与所述第三支撑柱的上表面固定连接;
16、所述第三支撑柱设置在所述第四支撑板与所述第五支撑板之间,所述第三支撑柱一端与所述第四支撑板固定连接,另一端与所述第五支撑板固定连接;
17、多个所述从动爬行机构沿着所述第三支撑柱的周向间隔设置,每个所述从动爬行机构均包括:从动轮支撑杆、从动轮电机、从动轮以及避震器;
18、所述从动轮支撑杆一端与所述第三支撑柱的侧壁转动连接;
19、所述从动轮电机安装在所述从动轮支撑杆的另一端;
20、所述从动轮与所述从动轮电机的输出端驱动连接;
21、所述避震器一端与所述第三支撑柱的侧壁连接,另一端与所述从动轮支撑杆中安装从动轮电机的端部连接。
22、优选,所述第三支撑柱为六棱柱。
23、进一步优选,所述主动爬行机构的个数和所述从动爬行机构的个数均为三个。
24、另一方面本实用新型还提供了一种自适应管道机器人,该管道机器人包括:多个自适应管道机器人单元,多个所述自适应管道机器人单元依次间隔设置,在相邻的自适应管道机器人单元之间均设置有柔性连接件,所述柔性连接件的两端分别与两个邻近的自适应管道机器人单元固定连接,所述自适应管道机器人单元为上述任意一种自适应管道机器人单元。
25、优选,所述柔性连接件为弹簧。
26、本实用新型提供的自适应管道机器人单元,由相互连接的第一支撑机构和第二支撑机构作为整体支撑,其中,多个主动爬行机构安装在第一支撑机构上,多个从动爬行机构安装在第二支撑机构上,且主动爬行机构中,丝杆螺母在丝杆电机的驱动下,可沿着丝杆电机中的丝杆进行上下移动,并通过连接杆带动主动轮支撑杆进行撑起或者收缩,以适应管道内的口径变化,而从动爬行机构通过避震器的设置,可随着主动爬行机构的的移动,适应管道的口径变化进行自动收缩,确保从动轮始终与管道内壁相接,自适应管道内径或者弯曲部分的变化。
27、本实用新型提供的自适应管道机器人,是由上述多个自适应管道机器人单元通过柔性连接件连接构成的。
28、本实用新型提供的自适应管道机器人单元,具有结构简单、设计合理、使用方便、适应性强等优点。
29、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本实用新型的公开。
技术特征:
1.一种自适应管道机器人单元,其特征在于,包括:第一支撑机构(1)、多个主动爬行机构(2)、第二支撑机构(3)以及多个从动爬行机构(4);
2.根据权利要求1所述自适应管道机器人单元,其特征在于,所述第三支撑柱(33)为六棱柱。
3.根据权利要求2所述自适应管道机器人单元,其特征在于,所述主动爬行机构(2)的个数和所述从动爬行机构(4)的个数均为三个。
4.一种自适应管道机器人,其特征在于,包括:多个自适应管道机器人单元(a),多个所述自适应管道机器人单元(a)依次间隔设置,在相邻的自适应管道机器人单元(a)之间均设置有柔性连接件(b),所述柔性连接件(b)的两端分别与两个邻近的自适应管道机器人单元(a)固定连接,所述自适应管道机器人单元(a)为权利要求1-3任一所述的自适应管道机器人单元。
5.根据权利要求4所述自适应管道机器人,其特征在于,所述柔性连接件(b)为弹簧。
技术总结
本技术公开了一种自适应管道机器人单元及其管道机器人,该自适应管道机器人单元由相互连接的第一支撑机构和第二支撑机构作为整体支撑,主动爬行机构安装在第一支撑机构上,从动爬行机构安装在第二支撑机构上,且主动爬行机构中,丝杆螺母在丝杆电机的驱动下,可沿着丝杆电机中的丝杆进行上下移动,并通过连接杆带动主动轮支撑杆进行撑起或者收缩,以适应管道内的口径变化,而从动爬行机构通过避震器的设置,可随着主动爬行机构的的移动,适应管道的口径变化进行自动收缩,确保从动轮始终与管道内壁相接,自适应管道内径或者弯曲部分的变化,具有结构简单、设计合理、使用方便、适应性强等优点。
技术研发人员:柳满昌,董成龙,卢义山春
受保护的技术使用者:沈阳航空航天大学
技术研发日:20230203
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!