可升降结构及挂轨式巡检机器人的制作方法
本技术涉及巡检机器人,具体为可升降结构及挂轨式巡检机器人。
背景技术:
1、挂轨式智能巡检机器人是专门应用于变电站户内各室的监测机器人系统,可替代人工完成多种巡检、探测、监控、故障诊断、预警报警功能。巡检机器人本体为了将自身搭载的智能感知设备送抵到最佳的探测位置,即巡检预置点位,通常需要在一定空间内进行上下左右移动,由于巡检任务是长时间多次重复进行,因此需要保证每次巡检时各巡检预置点位不应出现偏差,由此可见巡检机器人本体结构的移动定位精度是巡检作业的基础,也是关键项点。
2、现有技术中,巡检机器人多是通过驱动组件,在设置的轨道中进行移动,并在移动的过程中,通过摄像头进行巡检。
3、但是,大部分挂轨式巡检机器人在巡检过程中进行上下升降工作的时候可能会出现定位偏差问题,尤其在垂直方向上受重力影响,上下升降调节时很难保证定位精度,进而造成巡检点位偏移,影响巡检质量。
技术实现思路
1、本实用新型的目的在于提供可升降结构及挂轨式巡检机器人,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:可升降结构,所述可升降结构包括:
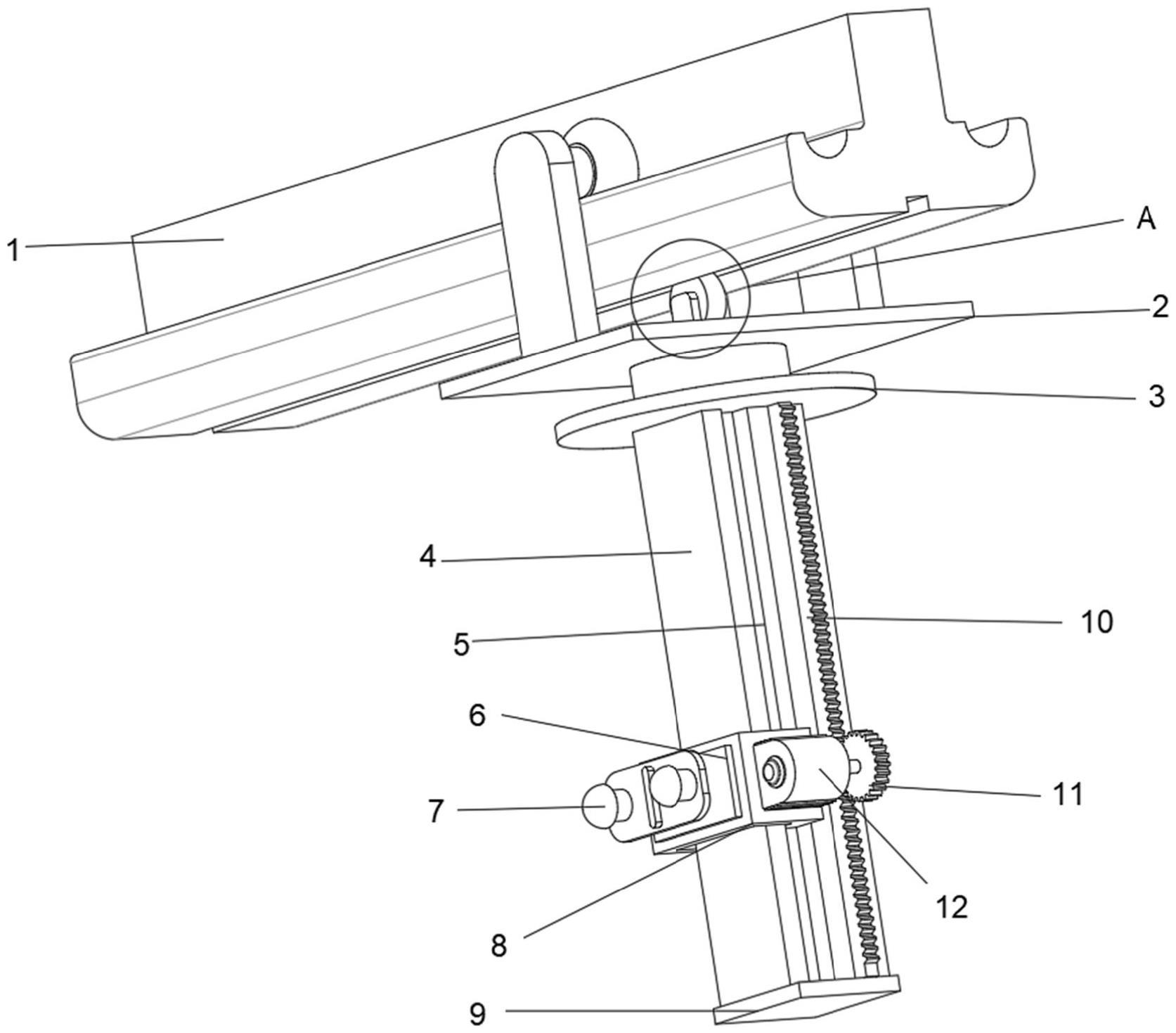
3、滑轨,所述滑轨滑动连接有滑板,所述滑板靠近滑轨的一端侧壁中间固定连接有滚轮;
4、连接柱,位于滑板下方,所述连接柱的侧壁上设有固定条和限位板,所述连接柱的两端侧壁均开设有移动槽;及
5、移动板,与连接柱相连接,所述移动板连接有双向电机和滑块。
6、优选的,所述滑板的下侧壁固定连接有电动转盘,所述电动转盘远离滑板的一端与连接柱固定连接。
7、优选的,所述固定条位于其中一个移动槽的一侧,所述固定条远离连接柱的一端侧壁上开设有若干个均匀分布的齿槽。
8、优选的,所述移动板呈“匚”字形,所述移动板与连接柱相对的侧壁上固定连接有安装板,所述安装板的侧壁上设有巡检机器人。
9、优选的,所述滑块设有两个,两个所述滑块分别固定连接在移动板相对的两侧内壁上,两个所述滑块的外壁分别与两个移动槽的内壁之间滑动连接。
10、优选的,所述双向电机固定连接在移动板一端外侧壁上,所述双向电机的输出端固定连接有齿轮盘,所述齿轮盘与齿槽之间啮合连接。
11、优选的,所述连接柱远离电动转盘的一端与限位板固定连接。
12、一种挂轨式巡检机器人,包括上述的可升降结构。
13、与现有技术相比,本实用新型的有益效果是:
14、当需要对巡检机器人进行升降处理时,首先根据需要升降的方向启动双向电机,随后带动齿轮盘进行转动,并通过齿轮盘与齿槽之间的啮合连接,以及滑块与移动槽之间的滑动连接,进而带动移动板侧壁上的巡检机器人在连接柱的侧壁上进行上下移动,以便于快速实现对巡检机器人的升降调节,且避免由于重力而造成巡检点位偏移的现象,以保证定位精准,同时可以通过转动电动转盘来实现对巡检机器人的检测角度进行调节。
技术特征:
1.可升降结构,其特征在于:所述可升降结构包括:
2.根据权利要求1所述的可升降结构,其特征在于:所述滑板(2)的下侧壁固定连接有电动转盘(3),所述电动转盘(3)远离滑板(2)的一端与连接柱(4)固定连接。
3.根据权利要求1所述的可升降结构,其特征在于:所述固定条(10)位于其中一个移动槽(5)的一侧,所述固定条(10)远离连接柱(4)的一端侧壁上开设有若干个均匀分布的齿槽(14)。
4.根据权利要求1所述的可升降结构,其特征在于:所述移动板(8)呈“匚”字形,所述移动板(8)与连接柱(4)相对的侧壁上固定连接有安装板(6),所述安装板(6)的侧壁上设有巡检机器人(7)。
5.根据权利要求1所述的可升降结构,其特征在于:所述滑块(15)设有两个,两个所述滑块(15)分别固定连接在移动板(8)相对的两侧内壁上,两个所述滑块(15)的外壁分别与两个移动槽(5)的内壁之间滑动连接。
6.根据权利要求3所述的可升降结构,其特征在于:所述双向电机(12)固定连接在移动板(8)一端外侧壁上,所述双向电机(12)的输出端固定连接有齿轮盘(11),所述齿轮盘(11)与齿槽(14)之间啮合连接。
7.根据权利要求2所述的可升降结构,其特征在于:所述连接柱(4)远离电动转盘(3)的一端与限位板(9)固定连接。
8.一种挂轨式巡检机器人,其特征在于:包括上述权利要求1-7中任意一项所述的可升降结构。
技术总结
本技术涉及巡检机器人技术领域,具体为可升降结构及挂轨式巡检机器人,包括:滑轨,连接柱和移动板,所述滑轨滑动连接有滑板,所述连接柱的侧壁上设有固定条和限位板,所述连接柱侧壁上开设有移动槽,所述移动板连接有双向电机和滑块;有益效果为:当需要对巡检机器人进行升降处理时,首先根据需要升降的方向启动双向电机,随后带动齿轮盘进行转动,并通过齿轮盘与齿槽之间的啮合连接,以及滑块与移动槽之间的滑动连接,进而带动移动板侧壁上的巡检机器人在连接柱的侧壁上进行上下移动,以便于快速实现对巡检机器人的升降调节,且避免由于重力而造成巡检点位偏移的现象,同时可以通过转动电动转盘来实现对巡检机器人的检测角度进行调节。
技术研发人员:宋先鹤,李阳,范玲梅,任世成
受保护的技术使用者:苏州三股道信息科技有限公司
技术研发日:20230303
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!