爬行式管道测绘机器人的制作方法
本技术涉及管道测绘领域,特别是涉及爬行式管道测绘机器人。
背景技术:
1、在现有的管道测绘中,通常将测绘设备搭载到管道小车上,使其在管道内行走,如202220020582 .x的专利中介绍了一种可自主爬行的管道测绘系统,其所应用的就是现有的最常见的搭载小车配备测绘器件,但是其电池本身安装在小车的车身内部,由于受到体积限制,不能过大,续航有限,如果通过增加小车长度,则单体长度过长容易被卡,其次,其通过底部的轮子进行行走,摩擦力通过摩擦系数及其车身重量决定,部分管道摩擦系数较小,使得轮子容易打滑,压力较小。
技术实现思路
1、本实用新型的目的就在于为了解决上述问题而提供爬行式管道测绘机器人。
2、本实用新型通过以下技术方案来实现上述目的:
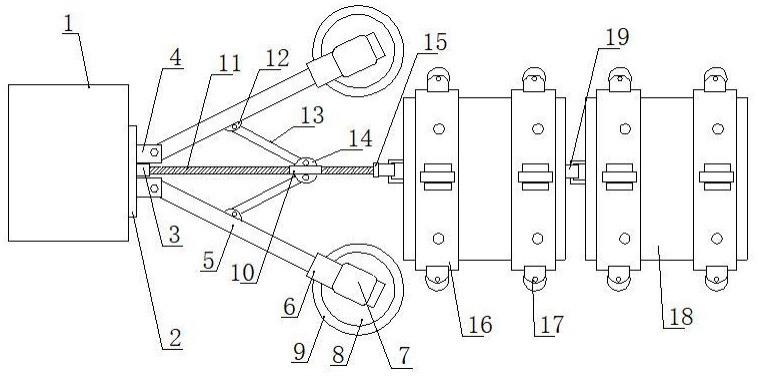
3、爬行式管道测绘机器人,包括测绘主体机和柱状电池壳体组成,所述测绘主体机的一侧固定安装有无线扁平盒体,所述无线扁平盒体内置无线控制器,所述无线扁平盒体的侧面固定有调节微电机盒体和若干个端部铰接件,所述调节微电机盒的盒壁上转动安装有调节螺杆,所述端部铰接件上转动安装有角度支杆,所述角度支杆的末端固定安装有驱动轮架,所述驱动轮架上转动安装有驱动轮,所述驱动轮架上固定安装有驱动电机,所述驱动电机与所述驱动轮的轮轴连接在一起,所述调节螺杆的一端延伸到所述调节微电机盒体的外侧并套设旋接有调节螺套,所述角度支杆的杆体通过中间铰接件转动安装有撑杆,所述撑杆的另一端转动安装有套铰接件,所述套铰接件固定安装到所述调节螺套上,所述调节螺杆的另一端延伸到所述调节微电机盒体内并与固定在所述调节微电机盒体内的微电机连接,所述调节螺杆的末端转动安装有转套,所述转套通过链扣连接安装有若干个柱状电池壳体,所述柱状电池壳体的外侧套设固定有助行环套,所述助行环套的环面上安装有若干个助行轮件。
4、进一步的,所述驱动电机的外侧罩设有驱动电机罩,所述驱动电机罩固定安装到所述驱动轮架上。
5、进一步的,所述驱动轮的轮体外环面上套设固定有防滑轮套。
6、进一步的,所述助行环套上开设有螺丝固定孔,所述助行环套通过所述螺丝固定孔内的螺丝与柱状电池壳体安装在一起。
7、有益效果在于:本实用新型所述的爬行式管道测绘机器人通过与若干个分体式电池活性连接,续航时间可延长,不容易被卡,同时适用于多种管道径度,结构简单易调节,通过角度调节使得脚轮与管壁紧压贴合,增大摩擦力。
技术特征:
1.一种爬行式管道测绘机器人,其特征在于:包括测绘主体机和柱状电池壳体组成,所述测绘主体机的一侧固定安装有无线扁平盒体,所述无线扁平盒体内置无线控制器,所述无线扁平盒体的侧面固定有调节微电机盒体和若干个端部铰接件,所述调节微电机盒的盒壁上转动安装有调节螺杆,所述端部铰接件上转动安装有角度支杆,所述角度支杆的末端固定安装有驱动轮架,所述驱动轮架上转动安装有驱动轮,所述驱动轮架上固定安装有驱动电机,所述驱动电机与所述驱动轮的轮轴连接在一起,所述调节螺杆的一端延伸到所述调节微电机盒体的外侧并套设旋接有调节螺套,所述角度支杆的杆体通过中间铰接件转动安装有撑杆,所述撑杆的另一端转动安装有套铰接件,所述套铰接件固定安装到所述调节螺套上,所述调节螺杆的另一端延伸到所述调节微电机盒体内并与固定在所述调节微电机盒体内的微电机连接,所述调节螺杆的末端转动安装有转套,所述转套通过链扣连接安装有若干个柱状电池壳体,所述柱状电池壳体的外侧套设固定有助行环套,所述助行环套的环面上安装有若干个助行轮件。
2.根据权利要求1所述的爬行式管道测绘机器人,其特征在于:所述驱动电机的外侧罩设有驱动电机罩,所述驱动电机罩固定安装到所述驱动轮架上。
3.根据权利要求1所述的爬行式管道测绘机器人,其特征在于:所述驱动轮的轮体外环面上套设固定有防滑轮套。
4.根据权利要求1所述的爬行式管道测绘机器人,其特征在于:所述助行环套上开设有螺丝固定孔,所述助行环套通过所述螺丝固定孔内的螺丝与柱状电池壳体安装在一起。
技术总结
本技术公开了爬行式管道测绘机器人,包括测绘主体机和柱状电池壳体组成,所述测绘主体机的一侧固定安装有无线扁平盒体,所述无线扁平盒体内置无线控制器,所述无线扁平盒体的侧面固定有调节微电机盒体和若干个端部铰接件,所述调节微电机盒的盒壁上转动安装有调节螺杆,所述端部铰接件上转动安装有角度支杆,所述角度支杆的末端固定安装有驱动轮架,所述驱动轮架上转动安装有驱动轮,所述驱动轮架上固定安装有驱动电机,所述驱动电机与所述驱动轮的轮轴连接在一起。有益效果在于:通过与若干个分体式电池活性连接,续航时间可延长,不容易被卡,同时适用于多种管道径度,结构简单易调节,通过角度调节使得脚轮与管壁紧压贴合,增大摩擦力。
技术研发人员:罗易智,张文学,何炼军
受保护的技术使用者:四川川测研地科技有限公司
技术研发日:20230307
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!