一种具备图像识别功能的吊轨机器人的制作方法
本技术涉及吊轨机器人领域,具体来说,涉及一种具备图像识别功能的吊轨机器人。
背景技术:
1、在工业生产中,需要定期进行状态巡检,以便及时发现厂区内部隐患,及时采取维修措施排除隐患,确保设备的安全和企业生产的正常运转。
2、单轨吊装巡检机器人是一种能够适应设备所在环境空间的检测设备,该设备的平稳运行和制动是保持准确检测的基本条件,因此,在控制运行速度和制动稳定性方面,巡检机器人必须能够自主控制自身运动时的平稳性。
3、现有的具备图像识别功能的吊轨机器人在机器人的运行过程中,缺乏一定的纠偏、减震结构,会影响其运行时的稳定性,且监测范围较小,无法满足用户需求。
4、针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本实用新型的目的在于提供一种具备图像识别功能的吊轨机器人,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种具备图像识别功能的吊轨机器人,包括机器人主体,所述机器人主体一端设有防震移动机构,所述机器人主体内部设有转向机构,所述转向机构一端设有图像识别机构;
4、所述防震移动机构包括固定片、防震组件、轮毂电机、伸出片和定位轮,所述机器人主体一端对称设有固定片,所述固定片一侧对称设有防震组件,所述防震组件一端固定连接有轮毂电机,所述固定片之间设有伸出片,所述伸出片一端设有定位轮,所述伸出片置于所述防震组件之间。
5、进一步的,所述防震组件包括连接端、连接杆、减震杆和减震端,所述固定片一端固定设有连接端,所述连接端一端活动连接有连接杆,所述连接杆另一端与所述轮毂电机固定连接,所述连接杆中部固定设有减震端,所述固定片靠近所述连接端的一端设有所述减震端,所述减震端之间固定有减震杆。
6、进一步的,所述转向机构包括转向电机、第一锥齿轮、转向轴、第二锥齿轮,所述转向电机一端设有第一锥齿轮,所述第一锥齿轮一侧设有转向轴,所述转向轴一端设有第二锥齿轮。
7、进一步的,所述转向轴穿过所述机器人主体,所述第一锥齿轮与所述第二锥齿轮啮合。
8、进一步的,所述图像识别机构包括放置盒、双轴电机、高清摄像头、红外摄像头和控制组件,所述放置盒内部设有双轴电机,所述双轴电机一端设有红外摄像头,所述双轴电机远离所述红外摄像头的一端设有高清摄像头,所述放置盒内部设有控制组件。
9、进一步的,所述控制组件包括处理器、无线收发模组和存储模组,所述处理器一侧设有无线收发模组,所述无线收发模组一侧设有存储模组。
10、与现有技术相比,本实用新型具有以下有益效果:
11、(1)、该装置一端安装有防震移动机构,防震移动机构通过轮毂电机提供动力来源,使用防震组件抵消该装置在移动中产生的震动,从而保护该装置,防止该装置因震动等原因导致内部机械元件寿命减少的情况发生。
12、(2)、该装置内部设有转向机构,转向机构通过转向电机提供动力,在第一锥齿轮与第二锥齿轮的帮助下使转向轴转动,从而能够使图像识别机构具有更大的探测范围。
13、(3)、图像识别机构通过双轴电机能够转动红外摄像头和高清摄像头,在配合转向机构,可使该装置内部摄像头始终对焦需检测物体,该装置内部安装有控制组件,可通过处理器来处理摄像头拍摄内容,再通过无线收发模组传输到监控中心,存储模组可存储摄像头拍摄信息,避免摄像画面损失的情况发生。
技术特征:
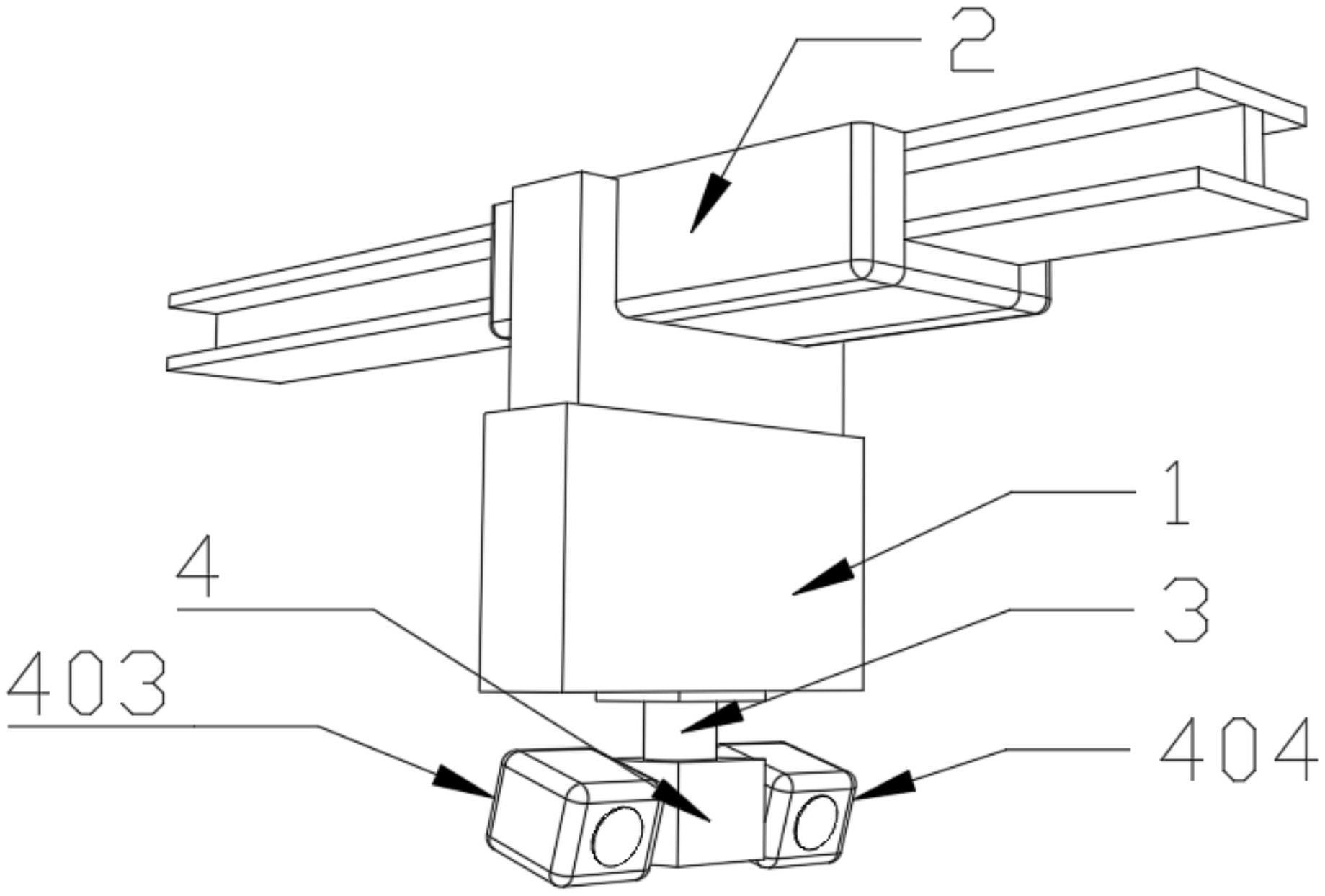
1.一种具备图像识别功能的吊轨机器人,其特征在于,包括机器人主体(1),所述机器人主体(1)一端设有防震移动机构(2),所述机器人主体(1)内部设有转向机构(3),所述转向机构(3)一端设有图像识别机构(4);
2.根据权利要求1所述的一种具备图像识别功能的吊轨机器人,其特征在于,所述防震组件(202)包括连接端(2021)、连接杆(2022)、减震杆(2023)和减震端(2024),所述固定片(201)一端固定设有连接端(2021),所述连接端(2021)一端活动连接有连接杆(2022),所述连接杆(2022)另一端与所述轮毂电机(203)固定连接,所述连接杆(2022)中部固定设有减震端(2024),所述固定片(201)靠近所述连接端(2021)的一端设有所述减震端(2024),所述减震端(2024)之间固定有减震杆(2023)。
3.根据权利要求1所述的一种具备图像识别功能的吊轨机器人,其特征在于,所述转向机构(3)包括转向电机(301)、第一锥齿轮(302)、转向轴(303)、第二锥齿轮(304),所述转向电机(301)一端设有第一锥齿轮(302),所述第一锥齿轮(302)一侧设有转向轴(303),所述转向轴(303)一端设有第二锥齿轮(304)。
4.根据权利要求3所述的一种具备图像识别功能的吊轨机器人,其特征在于,所述转向轴(303)穿过所述机器人主体(1),所述第一锥齿轮(302)与所述第二锥齿轮(304)啮合。
5.根据权利要求1所述的一种具备图像识别功能的吊轨机器人,其特征在于,所述图像识别机构(4)包括放置盒(401)、双轴电机(402)、高清摄像头(403)、红外摄像头(404)和控制组件(405),所述放置盒(401)内部设有双轴电机(402),所述双轴电机(402)一端设有红外摄像头(404),所述双轴电机(402)远离所述红外摄像头(404)的一端设有高清摄像头(403),所述放置盒(401)内部设有控制组件(405)。
6.根据权利要求5所述的一种具备图像识别功能的吊轨机器人,其特征在于,所述控制组件(405)包括处理器(4051)、无线收发模组(4052)和存储模组(4053),所述处理器(4051)一侧设有无线收发模组(4052),所述无线收发模组(4052)一侧设有存储模组(4053)。
技术总结
本技术公开了一种具备图像识别功能的吊轨机器人,包括器人主体,所述机器人主体一端设有防震移动机构,所述机器人主体内部设有转向机构,所述转向机构一端设有图像识别机构,所述机器人主体一端对称设有固定片,所述固定片一侧对称设有防震组件,所述防震组件一端固定连接有轮毂电机,所述固定片之间设有伸出片,所述伸出片一端设有定位轮,有益效果:防震移动机构使用防震组件抵消该装置在移动中产生的震动,进一步增加该装置平稳性,防止该装置因震动等原因导致内部机械元件寿命减少的情况发生,该装置内部设有转向机构,转向机构通过第一锥齿轮与第二锥齿轮使转向轴转动,从而能够使图像识别机构具有更大的探测范围。
技术研发人员:郑明,谢招贤,金锋,侯金生
受保护的技术使用者:天津创发科技有限公司
技术研发日:20230309
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!