一种巡检机器人的升降机构及巡检机器人的制作方法
本技术涉及巡检机器人,具体涉及一种巡检机器人的升降机构及巡检机器人。
背景技术:
1、巡检机器人主要通过自主充电、路径规划、自主导航定位、图像识别分析、环境感知等技术实现巡检任务的设备,无需人工干预,为企业提供设备故障的判别和自动报警,帮助企业更好的自动化管理。
2、现有的巡检机器人在对周围环境进行识别分析时通过云台进行收集,但是大多数巡检机器人不方便调节云台的高度,对周边的环境进行识别分析时有局限性,这时会用到图像采集设备,但是缺少调节设备高度的功能,同时也欠缺对云台的正面进行防护,容易对云台造成损伤,从而降低工作效率,因此针对上述问题做进一步的优化。
技术实现思路
1、本实用新型目的是提供一种巡检机器人的升降机构及巡检机器人,可以对云台起到防护的作用,避免设置在巡检机器人上的云台正面受到损伤影响使用,同时也可以调节设置在巡检机器人上的图像采集设备的高度,配合周边的环境进行使用。
2、为实现以上目的,本实用新型通过以下技术方案予以实现:
3、设计一种巡检机器人的升降机构,包括限位板、u型支板和升降机构,所述限位板通过滑道与u型支板可拆卸连接,所述升降机构包括马达、转杆、升降台和l型支杆,所述u型支板上表面的两端分别固定连接有转杆和l型支杆,所述马达设置在u型支板的底部,所述转杆设置在马达的输出端且转杆的顶端贯穿u型支板的内顶壁插接在l型支杆的内部,所述升降台的两端分别设置在转杆和l型支杆的外表面。
4、可选的,所述升降台的上表面通过螺纹可拆卸连接有限位筒,所述限位筒的内部插接有用于放置图像采集设备的支撑盘,所述限位筒的外表面螺纹连接有紧固栓,所述紧固栓的一端贯穿限位筒的内侧壁并抵紧支撑。
5、可选的,所述限位板的侧面插接有用于对所述u型支板限位的把手杆,所述u型支板两端的侧面开设有限位孔。
6、可选的,所述把手杆的两端贯穿限位板并延伸至限位孔的内部,所述把手杆两端的表面套装有复位弹簧。
7、可选的,所述复位弹簧的两端分别抵紧把手杆和限位板的内侧壁,所述限位板的数量两个。
8、一种巡检机器人,包括巡检机器人底座和上述升降机构,所述限位板设置在巡检机器人底座上,所述巡检机器人底座的上表面设置有防护机构。
9、可选的,所述防护机构包括防护板、支柱和内螺纹筒,所述防护板的形状为弧形状,且材质为透明材质。
10、可选的,所述内螺纹筒固定连接在巡检机器人底座上表面的边缘处,所述防护板通过支柱底端表面的螺纹与内螺纹筒进行连接。
11、可选的,还包括云台,所述云台设置在机器人底座上。
12、本实用新型具备以下有益效果:
13、1、该实用新型通过限位板、u型支板马达、转杆和升降台的设置,升降台的表面可以安装图像采集设备,启动马达可以带动转杆转动,从而带动升降台上升和下降,方便调节升降台的高度,利用图像采集设备收集数据,方便调节不同的高度采集数据,u型支板的两端可以插在限位板的内部,方便快速的对其进行组装,大大提升了工作效率;
14、2、该实用新型通过巡检机器人底座、防护板、支柱和内螺纹筒的设置,防护板可以对巡检机器人底座顶部的云台做进一步的防护,减少因外界的因素对其造成损伤,支柱可以对防护板进行支撑,保持使用时的稳定性,利用支杆的底端可以与内螺纹筒螺纹连接,方便拆卸,便于后期的维护。
技术特征:
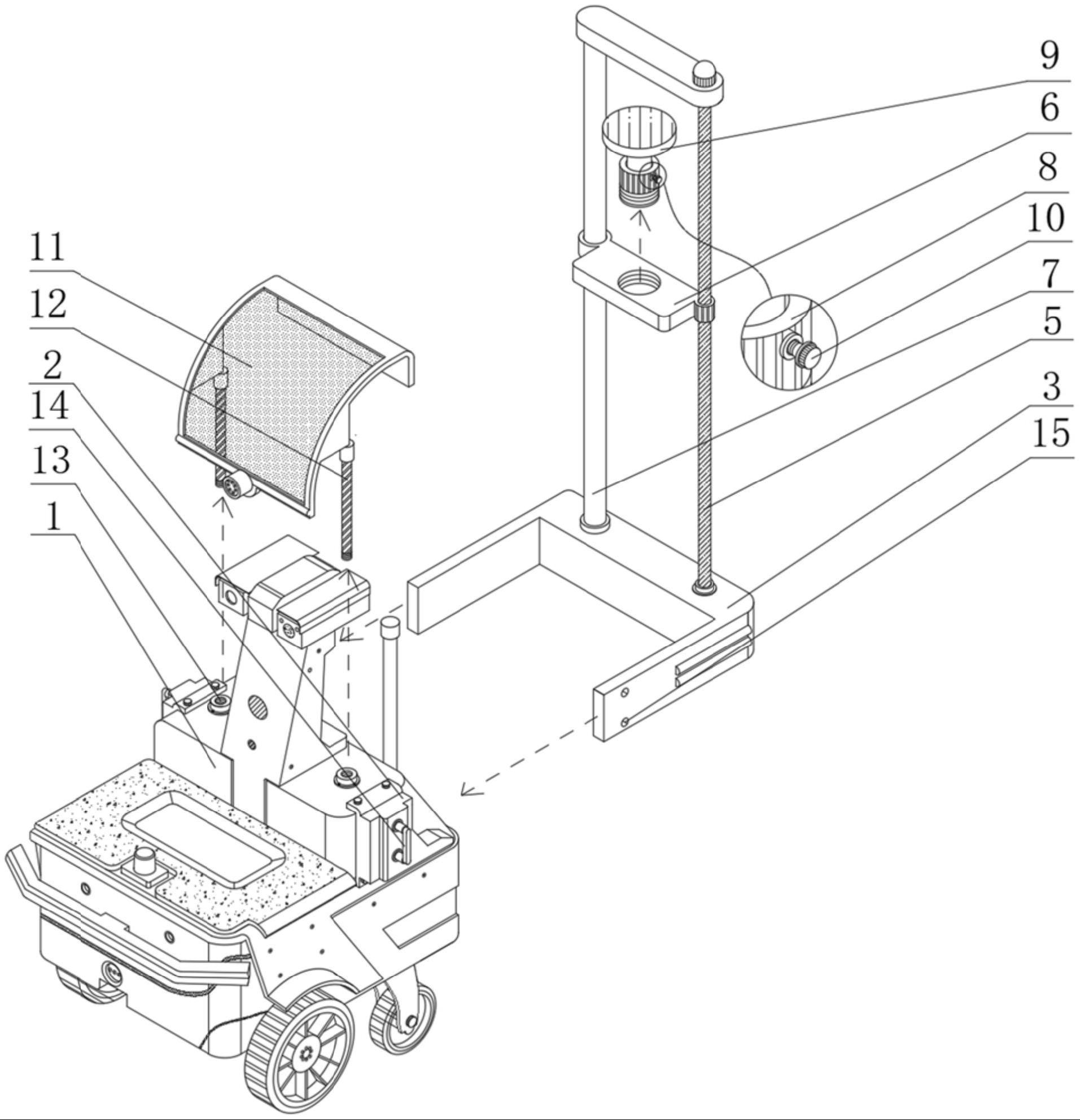
1.一种巡检机器人的升降机构,其特征在于:包括限位板(2)、u型支板(3)和升降机构,所述限位板(2)通过滑道与u型支板(3)可拆卸连接,所述升降机构包括马达(4)、转杆(5)、升降台(6)和l型支杆(7),所述u型支板(3)上表面的两端分别固定连接有转杆(5)和l型支杆(7),所述马达(4)设置在u型支板(3)的底部,所述转杆(5)设置在马达(4)的输出端且转杆(5)的顶端贯穿u型支板(3)的内顶壁插接在l型支杆(7)的内部,所述升降台(6)的两端分别设置在转杆(5)和l型支杆(7)的外表面。
2.根据权利要求1所述的一种巡检机器人的升降机构,其特征在于:所述升降台(6)的上表面通过螺纹可拆卸连接有限位筒(8),所述限位筒(8)的内部插接有用于放置图像采集设备的支撑盘(9),所述限位筒(8)的外表面螺纹连接有紧固栓(10),所述紧固栓(10)的一端贯穿限位筒(8)的内侧壁并抵紧支撑。
3.根据权利要求1所述的一种巡检机器人的升降机构,其特征在于:所述限位板(2)的侧面插接有用于对所述u型支板(3)限位的把手杆(14),所述u型支板(3)两端的侧面开设有限位孔(15)。
4.根据权利要求3所述的一种巡检机器人的升降机构,其特征在于:所述把手杆(14)的两端贯穿限位板(2)并延伸至限位孔(15)的内部,所述把手杆(14)两端的表面套装有复位弹簧(16)。
5.根据权利要求4所述的一种巡检机器人的升降机构,其特征在于:所述复位弹簧(16)的两端分别抵紧把手杆(14)和限位板(2)的内侧壁,所述限位板(2)的数量两个。
6.一种巡检机器人,其特征在于:包括巡检机器人底座(1)和如权利要求1至5中任一项所述的升降机构,所述限位板(2)设置在巡检机器人底座(1)上,所述巡检机器人底座(1)的上表面设置有防护机构。
7.根据权利要求6所述的一种巡检机器人,其特征在于:所述防护机构包括防护板(11)、支柱(12)和内螺纹筒(13),所述防护板(11)的形状为弧形状,且材质为透明材质。
8.根据权利要求7所述的一种巡检机器人,其特征在于:所述内螺纹筒(13)固定连接在巡检机器人底座(1)上表面的边缘处,所述防护板(11)通过支柱(12)底端表面的螺纹与内螺纹筒(13)进行连接。
9.根据权利要求6所述的一种巡检机器人,其特征在于:还包括云台,所述云台设置在机器人底座(1)上。
技术总结
本技术涉及巡检机器人技术领域,且公开了一种巡检机器人的升降机构及巡检机器人,巡检机器人的升降机构包括限位板、U型支板和升降机构,所述限位板通过滑道与U型支板可拆卸连接,所述升降机构包括马达、转杆、升降台和L型支杆。本技术提供了一种巡检机器人的升降机构及巡检机器人,通过限位板、U型支板马达、转杆和升降台的设置,升降台的表面可以安装图像采集设备,启动马达可以带动转杆转动,从而带动升降台上升和下降,方便调节升降台的高度,利用图像采集设备收集数据,方便调节不同的高度采集数据,U型支板的两端可以插在限位板的内部,方便快速的对其进行组装,大大提升了工作效率。
技术研发人员:辛桂阳,薛可可,马志强
受保护的技术使用者:深圳艾斯克机器人科技有限公司
技术研发日:20230412
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!