一种注塑机电熔胶用大速比行星减速机的制作方法
本技术涉及减速机设备,具体是一种注塑机电熔胶用大速比行星减速机。
背景技术:
1、注塑机又名注射成型机或注射机,很多工厂叫啤机,注塑产品叫啤件,它是将热塑性塑料或热固性料利用塑料成型模具制成各种形状的塑料制品的主要成型设备,注塑机按照注射装置和锁模装置的排列方式,可分为立式、卧式和立卧复合式,螺杆式注塑机塑化装置主要由加料装置、料筒、螺杆、过胶组件、射嘴部分组成,动力传递装置包括注射油缸、注射座移动油缸以及螺杆驱动装置(液压马达),然后行星减速机具有体积小、重量轻、过载能力强等诸多优点,正被广泛用于注塑机电熔胶处用于替代油压马达。
2、在现有技术中,注塑螺杆需要转速低,扭矩大时,此时需要减速机16左右速比.行星减速机单级速比一般不超10比,速比16需要做两级减速,此时减速机长度较长,由于行星减速机输入与输出在同一轴向上,再加上伺服电机长度,将导致整个设备轴向尺寸较长,此外在上述原因的情况下,也导致减速机的成本提升。
技术实现思路
1、本实用新型的目的在于提供一种注塑机电熔胶用大速比行星减速机,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
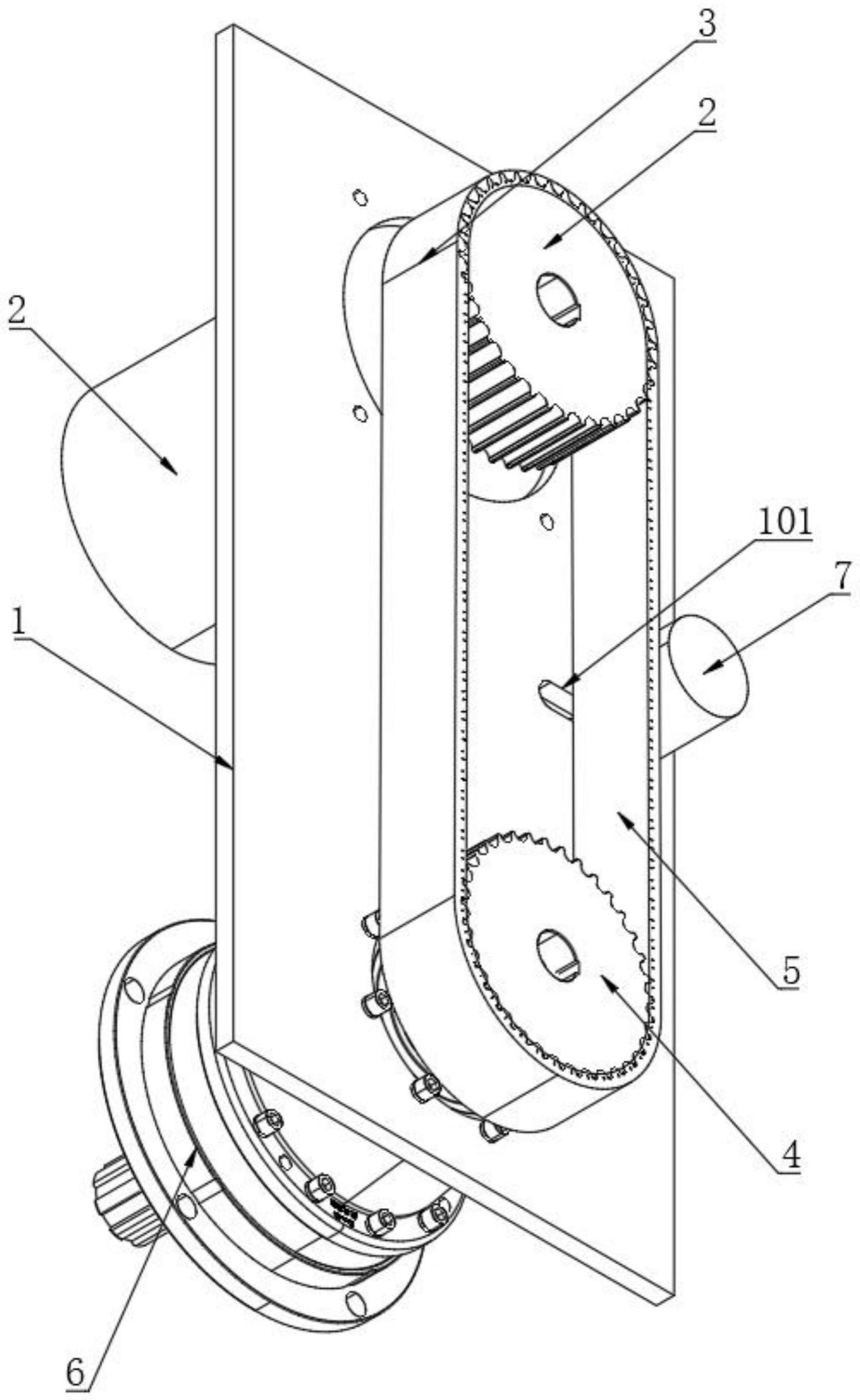
3、一种注塑机电熔胶用大速比行星减速机,包括安装板,所述安装板左侧上设置有伺服电机,所述伺服电机的动力输出轴贯穿安装板且与安装板转动连接,所述伺服电机的动力输出轴上通过联轴器设置有第一带轮,所述安装板上位于第一带轮下方通过转轴转动设置有第二带轮,所述第一带轮通过同步齿形带与第二带轮连接,所述安装板上位于伺服电机下方还设置有行星减速机,所述行星减速机的动力输入轴通过联轴器与转轴连接。
4、作为本实用新型进一步的方案:所述伺服电机通过固定螺栓设置于安装板上。
5、作为本实用新型再进一步的方案:所述安装板上还滑动设置有滑动槽。
6、作为本实用新型再进一步的方案:所述滑动槽上滑动设置有调节杆,调节杆上转动设置有限位转辊。
7、作为本实用新型再进一步的方案:所述调节杆上还通过螺纹连接设置有与安装板配合使用的固定螺母。
8、相较于现有技术,本实用新型的有益效果如下:
9、1、在第一带轮、第二带轮以及同步齿形带的作用下,使得整个减速机为一级行星齿轮传动加上一级同步带轮实现16左右速比,无需多级减速即可使得减速机保持在16左右的速比;
10、2、在一级行星齿轮传动加上一同步带的作用下,使得装置中的电机以及减速机可以平行布置,起到了节省轴向空间的作用,在一定程度上有助于解决轴向尺寸过长的问题;3、用一级带轮传动替代行星齿轮传动经济性较好可以降低整个减速机的成本。
技术特征:
1.一种注塑机电熔胶用大速比行星减速机,包括安装板(1),其特征在于,所述安装板(1)左侧上设置有伺服电机(2),所述伺服电机(2)的动力输出轴贯穿安装板(1)且与安装板(1)转动连接,所述伺服电机(2)的动力输出轴上通过联轴器设置有第一带轮(3),所述安装板(1)上位于第一带轮(3)下方通过转轴转动设置有第二带轮(4),所述第一带轮(3)通过同步齿形带(5)与第二带轮(4)连接,所述安装板(1)上位于伺服电机(2)下方还设置有行星减速机(6),所述行星减速机(6)的动力输入轴通过联轴器与转轴连接。
2.根据权利要求1所述的注塑机电熔胶用大速比行星减速机,其特征在于,所述伺服电机(2)通过固定螺栓设置于安装板(1)上。
3.根据权利要求1所述的注塑机电熔胶用大速比行星减速机,其特征在于,所述安装板(1)上还滑动设置有滑动槽(101)。
4.根据权利要求3所述的注塑机电熔胶用大速比行星减速机,其特征在于,所述滑动槽(101)上滑动设置有调节杆(8),调节杆(8)上转动设置有限位转辊(7)。
5.根据权利要求4所述的注塑机电熔胶用大速比行星减速机,其特征在于,所述调节杆(8)上还通过螺纹连接设置有与安装板(1)配合使用的固定螺母(9)。
技术总结
本技术公开了一种注塑机电熔胶用大速比行星减速机,涉及减速机设备技术领域,包括安装板,所述安装板上设置伺服电机以及行星减速机,伺服电机的动力输出轴上通过联轴器设置有第一带轮,所述安装板上还通过转轴设置第二带轮,第一带轮与第二带轮通过同步齿形带连接,行星减速机的动力输入轴通过联轴器与转轴连接。本技术在第一带轮、第二带轮以及同步齿形带的作用下,使得整个减速机为一级行星齿轮传动加上一级同步带轮实现16左右速比,此外使得装置中的电机以及减速机可以平行布置,节省了轴向空间,解决了轴向尺寸过长的问题,用一级带轮传动替代行星齿轮传动经济性较好可以降低整个减速机的成本。
技术研发人员:张伟,潘聚刚,李田阳,李嘉鑫
受保护的技术使用者:纽氏重载伺服行星传动科技(淄博)有限公司
技术研发日:20230519
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!