两位三通电磁阀多重冗余连接装置的制作方法
本技术涉及自动化仪表,尤其涉及一种两位三通电磁阀多重冗余连接装置。
背景技术:
1、化工企业生产中,开关阀的形式一般选用气动开关阀。气动开关阀的开、关控制是利用电磁阀控制仪表气的通断实现的。目前,电磁阀的配置有三种形式,即单台电磁阀、两台电磁阀串接以及两台电磁阀并接。其中,单台电磁阀配置适用于一般的没有特殊要求的场所。对于两台电磁阀串接的配置方式,只要其中任何一台电磁阀失电或是故障,气动开关阀就会动作,进入故障安全位置,因此该方式具有高安全性的特点。对于两台电磁阀并接的配置方式,当一台电磁阀出现故障或是断电的情况,另一台电磁阀能够继续正常工作,气动开关阀不受影响,只有当两台电磁阀同时失电或是故障时,气动开关阀才会动作,因此该方式具有高稳定性的特点。
2、在对生产安全性要求较高的工艺中,气动开关阀的电磁阀可采用两台电磁阀串接的配置方式。特别是安全仪表系统的气动开关阀,为了保证系统的高安全性,有些需要采用两个电磁阀串接的形式。但是在这种连接方式中,一旦出现电磁阀接线头松动或线头脱落、电磁阀接线口进水、电磁阀线圈烧坏等常见故障,便会造成电磁阀失电、气动开关阀意外动作,从而引发联锁停车,系统的稳定性大大降低。
3、公告号为cn213685400u的中国专利提出了一种四个电磁阀组成的串并联结构的气动控制装置,通过四个电磁阀的串并联冗余控制,不仅可避免单个电磁阀误动引起某个设备或系统停车事件的发生,而且可以降低电磁阀拒动概 率。但是该结构较为复杂,当单个电磁阀故障或失电时,需要采用气锁阀进行动作隔离。
技术实现思路
1、有鉴于此,本实用新型的目的在于提出一种两位三通电磁阀多重冗余连接装置,以解决上述问题。
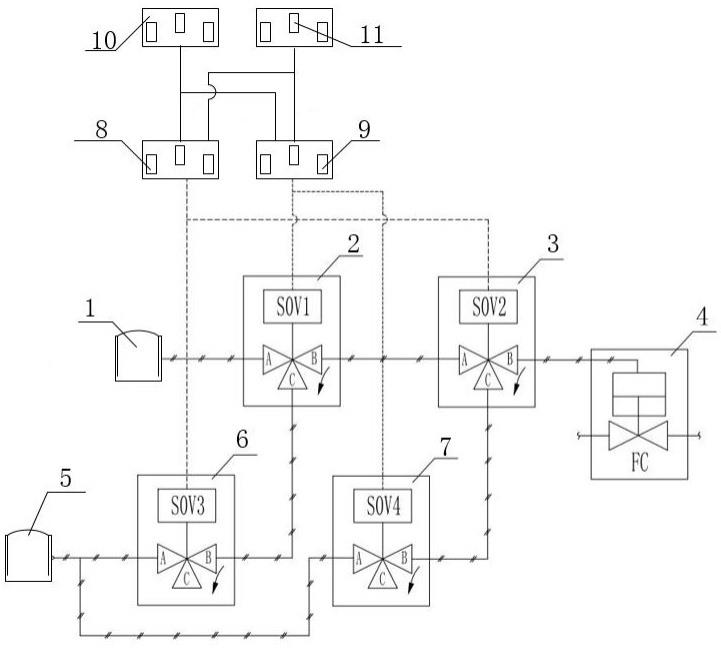
2、基于上述目的,本实用新型提供了一种两位三通电磁阀多重冗余连接装置,包括:第一仪表气、第一电磁阀、第二电磁阀、气动开关阀、第二仪表气、第三电磁阀、第四电磁阀、第一路电源和第二路电源;第一仪表气与第一电磁阀进气口连接,第一电磁阀与第二电磁阀串接,第二电磁阀出气口与气动开关阀连接;第二仪表气分别与第三电磁阀进气口、第四电磁阀进气口连接,第三电磁阀出气口与第一电磁阀排气口连接,第四电磁阀出气口与第二电磁阀排气口连接;第一路电源分别与第二电磁阀、第三电磁阀电连接,第二路电源分别与第一电磁阀、第四电磁阀电连接。
3、与现有技术相比,本实用新型的有益效果在于:在第一电磁阀和第二电磁阀串接的基础上,增加第三电磁阀和第四电磁阀。采用两仪表气分别为四个电磁阀供气,并采用两路电源分别为四个电磁阀供电。本装置保留了电磁阀串接的特性,同时能够在任意一台电磁阀突然失电或是某一路电源供电故障时,仪表气都能实现为气动开关阀供气,在保证系统高安全性的同时,也实现了高稳定性。
4、进一步地,本装置还包括第一电源和第二电源,第一电源分别与第一路电源、第二路电源电连接,第二电源分别与第一路电源、第二路电源电连接;采用两个独立的电源分别为第一路电源供电,同时,这两个独立的电源也分别为第二路电源供电,提高了第一路电源和第二路电源的稳定性。
5、进一步地,第一电磁阀与第二电磁阀串接方式为:第一电磁阀出气口与第二电磁阀进气口连接。
技术特征:
1.一种两位三通电磁阀多重冗余连接装置,包括:第一仪表气、第一电磁阀、第二电磁阀、气动开关阀、第二仪表气、第三电磁阀、第四电磁阀、第一路电源和第二路电源;其特征在于,
2.根据权利要求1所述的两位三通电磁阀多重冗余连接装置,其特征在于,还包括第一电源和第二电源,第一电源分别与第一路电源、第二路电源电连接,第二电源分别与第一路电源、第二路电源电连接。
3.根据权利要求1所述的两位三通电磁阀多重冗余连接装置,其特征在于,第一电磁阀与第二电磁阀串接方式为:第一电磁阀出气口与第二电磁阀进气口连接。
技术总结
本技术提供一种两位三通电磁阀多重冗余连接装置,涉及自动化仪表技术领域。本装置包括第一仪表气、第一电磁阀、第二电磁阀、气动开关阀、第二仪表气、第三电磁阀、第四电磁阀、第一路电源和第二路电源。第一仪表气与第一电磁阀进气口连接,第一电磁阀与第二电磁阀串接,第二电磁阀出气口与气动开关阀连接。第二仪表气分别与第三电磁阀进气口、第四电磁阀进气口连接,第三电磁阀出气口与第一电磁阀排气口连接,第四电磁阀出气口与第二电磁阀排气口连接。第一路电源分别与第二电磁阀、第三电磁阀电连接,第二路电源分别与第一电磁阀、第四电磁阀电连接。本装置在不降低系统安全性的前提下,提高了系统的稳定性。
技术研发人员:田娜,王志勇,杨善厚,李志刚,赵悦,王玉昌,赵清,崔建兵,崔旸,闫建宁,梁爱华,马哲纯,郭永,高俊敬,程宇华
受保护的技术使用者:唐山三友氯碱有限责任公司
技术研发日:20230529
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!