管道非开挖式修复预处理机器人的三自由度机械臂的制作方法
本技术涉及机器人,特别涉及管道非开挖式修复预处理机器人的三自由度机械臂。
背景技术:
1、近几十年来,大量老旧、低质管道设施使地下管道输排能力变得不足。目前城市地下管道腐蚀、渗漏、变形、破坏、堵塞等各类问题突出,管道不能按设计要求发挥应有作用。为了解决这些问题,近年来出现了一种新的管道维修方式——非开挖式修复技术。
2、在非开挖式管道修复技术领域中,存在一个问题,即管道内部常常存在沉积物、污垢、杂物等不利因素,这些因素会影响修复材料的附着性和修复效果。
3、为此我们提出管道非开挖式修复预处理机器人的三自由度机械臂。
技术实现思路
1、本实用新型的目的是提供管道非开挖式修复预处理机器人的三自由度机械臂,从而解决或者至少缓解了现有技术中存在的上述问题和其他方面的问题中的一个或多个。
2、为了达到上述目的,本实用新型采用的主要技术方案包括:
3、管道非开挖式修复预处理机器人的三自由度机械臂,包括:
4、大臂组件,所述大臂组件的一端设置有用于对所述大臂组件进行俯、仰角度调节的第一角度调节组件;
5、用于控制所述大臂组件和第一角度调节组件共同的转动角度的旋转驱动组件,所述旋转驱动组件的输出端与所述第一角度调节组件相连接;
6、小臂组件,所述大臂组件远离所述第一调节组件的一端设置有用于对所述小臂组件进行俯、仰角度调节的第二角度调节组件,所述第二角度调节组件的输出端与所述小臂组件的一端相连接;
7、末端执行器,用于对管道内沉积物进行清理的所述末端执行器设置在所述小臂组件远离所述第二角度调节组件的一端,所述末端执行器为模块化设计的可更换的执行器。
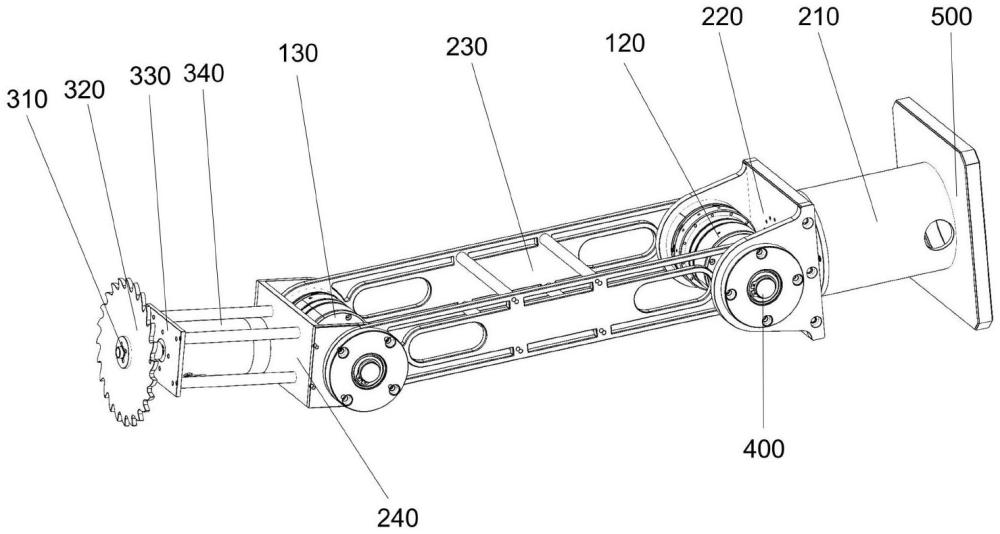
8、在根据本实用新型的管道非开挖式修复预处理机器人的三自由度机械臂,其中,所述旋转驱动组件包括安装在管道非开挖式修复预处理机器人上的底座,所述底座的一侧固定连接有关节模组底座,所述关节模组底座的内部固定安装有关节模组,所述关节模组的输出端通过关节连接件与所述第一角度调节组件连接。
9、在根据本实用新型的管道非开挖式修复预处理机器人的三自由度机械臂,其中,所述关节连接件包括底盘安装板、右侧驱动板和左侧驱动板,所述右侧驱动板和所述左侧驱动板分别固定连接在所述底盘安装板的两端,所述第一角度调节组件固定安装在所述右侧驱动板和所述左侧驱动板之间。
10、在根据本实用新型的管道非开挖式修复预处理机器人的三自由度机械臂,其中,所述大臂组件包括大手臂左侧板和大手臂右侧板,所述第一角度调节组件包括第二关机模组,所述第二关机模组固定安装在所述左侧驱动板上,所述第二关机模组的输出端可转动的穿过所述左侧驱动板后与所述大手臂左侧板的一端固定连接,所述大手臂右侧板的一端通过旋转组件与所述右侧驱动板转动连接。
11、在根据本实用新型的管道非开挖式修复预处理机器人的三自由度机械臂,其中,所述大手臂左侧板与所述大手臂右侧板之间固定连接有若干支撑柱。
12、在根据本实用新型的管道非开挖式修复预处理机器人的三自由度机械臂,其中,所述小臂组件包括小手臂左侧板和小手臂右侧板,所述第二角度调节组件包括第三关节模组,所述第三关节模组固定安装在所述大手臂左侧板远离所述第二关机模组的一端,所述第三关节模组的输出端可转动的穿过所述大手臂左侧板后与所述小手臂左侧板固定连接,所述小手臂右侧板通过另一组所述旋转组件与所述大手臂右侧板远离所述第二关机模组的一端转动连接,所述小手臂左侧板和所述小手臂右侧板之间固定连接有末端执行器固定板。
13、在根据本实用新型的管道非开挖式修复预处理机器人的三自由度机械臂,其中,所述末端执行器为带有铣刀头的执行器、带有钻头的执行器或者带有锯片的执行器。
14、在根据本实用新型的管道非开挖式修复预处理机器人的三自由度机械臂,其中,所述带有锯片的末端执行器包括气动马达、马达安装板、轴套连接杆和锯片,所述气动马达的输出端与所述轴套连接杆的下端固定连接,所述轴套连接杆的上端通过螺栓与所述锯片固定连接,所述气动马达固定安装在所述马达安装板的底部,所述马达安装板的底部通过支撑杆与所述末端执行器固定板的顶部固定连接。
15、在根据本实用新型的管道非开挖式修复预处理机器人的三自由度机械臂,其中,所述支撑杆设置有四根,四根所述支撑杆分别设置在所述马达安装板的底部。
16、在根据本实用新型的管道非开挖式修复预处理机器人的三自由度机械臂,其中,所述旋转组件包括弹性挡圈、深沟球轴承、用于对所述深沟球轴承外圈进行固定支撑的驱动轴承座和旋转轴;所述旋转组件包括弹性挡圈、深沟球轴承、旋转轴以及用于对所述深沟球轴承外圈进行固定支撑的驱动轴承座;所述旋转轴包括成盘状的大头端以及与与所述大头端同轴设置的轴段,所述轴段远离所述大头端的一端能穿过所述深沟球轴承的轴承孔并与深沟球轴承的内圈过盈配合,所述轴段上伸出所述轴承孔的部分上设有用于卡接所述弹性挡圈的卡槽。
17、本实用新型至少具备以下有益效果:
18、通过设置的大臂组件、第一角度调节组件、小臂组件、第二角度调节组件、旋转驱动组件和末端执行器可以根据管道内部实际情况对末端执行器进行多角度调节,适用性广;
19、通过采用机械臂末端执行器模块化设计,不仅可以清理管道内部,准备修复区域,提高修复效果的质量和持久性,而且可以根据具体任务需求更换不同的末端执行器,提高了机械臂的灵活性和适用性;
20、在一些优选选的实施例中,末端执行器采用气动马达作为末端执行器动力装置,相较于电机来说在高温、高湿等特殊环境中更加可靠稳定;
21、在一些优选选的实施例中,采用关节模组直连设计,简化了机械臂的结构,提高了机械臂的精度和稳定性,而且可以对末端执行器进行三个自由度的调节;
22、在一些优选选的实施例中,大手臂左侧板和大手臂右侧板之间添加支撑柱,增加了机械臂的刚性和稳定性,同时减小了机械臂的振动和误差。
技术特征:
1.管道非开挖式修复预处理机器人的三自由度机械臂,其特征在于,包括:
2.根据权利要求1所述的管道非开挖式修复预处理机器人的三自由度机械臂,其特征在于:所述旋转驱动组件包括安装在管道非开挖式修复预处理机器人上的底座,所述底座的一侧固定连接有关节模组底座,所述关节模组底座的内部固定安装有关节模组,所述关节模组的输出端通过关节连接件与所述第一角度调节组件连接。
3.根据权利要求2所述的管道非开挖式修复预处理机器人的三自由度机械臂,其特征在于:所述关节连接件包括底盘安装板、右侧驱动板和左侧驱动板,所述右侧驱动板和所述左侧驱动板分别固定连接在所述底盘安装板的两端,所述第一角度调节组件固定安装在所述右侧驱动板和所述左侧驱动板之间。
4.根据权利要求3所述的管道非开挖式修复预处理机器人的三自由度机械臂,其特征在于:所述大臂组件包括大手臂左侧板和大手臂右侧板,所第一角度调节组件包括第二关机模组,所述第二关机模组固定安装在所述左侧驱动板上,所述第二关机模组的输出端转动贯穿所述左侧驱动板后与所述大手臂左侧板的一端固定连接,所述大手臂右侧板的一端通过旋转组件与所述右侧驱动板转动连接。
5.根据权利要求4所述的管道非开挖式修复预处理机器人的三自由度机械臂,其特征在于:所述大手臂左侧板与所述大手臂右侧板之间固定连接有若干支撑柱。
6.根据权利要求4所述的管道非开挖式修复预处理机器人的三自由度机械臂,其特征在于:所述小臂组件包括小手臂左侧板和小手臂右侧板,所述第二角度调节组件包括第三关节模组,所述第三关节模组固定安装在所述大手臂左侧板远离所述第二关机模组的一端,所述第三关节模组的输出端转动贯穿所述大手臂左侧板后与所述小手臂左侧板固定连接,所述小手臂右侧板通过另一组所述旋转组件与所述大手臂右侧板远离所述第二关机模组的一端转动连接,所述小手臂左侧板和所述小手臂右侧板之间固定连接有末端执行器固定板。
7.根据权利要求6所述的管道非开挖式修复预处理机器人的三自由度机械臂,其特征在于:所述末端执行器为带有铣刀头的执行器、带有钻头的执行器或者带有锯片的执行器。
8.根据权利要求7所述的管道非开挖式修复预处理机器人的三自由度机械臂,其特征在于:带有锯片的所述末端执行器包括气动马达、马达安装板、轴套连接杆和锯片,所述气动马达的输出端与所述轴套连接杆的下端固定连接,所述轴套连接杆的上端通过螺栓与所述锯片固定连接,所述气动马达固定安装在所述马达安装板的底部,所述马达安装板的底部通过支撑杆与所述末端执行器固定板的顶部固定连接。
9.根据权利要求8所述的管道非开挖式修复预处理机器人的三自由度机械臂,其特征在于:所述支撑杆设置有四根,四根所述支撑杆分别设置在所述马达安装板的底部。
10.根据权利要求6所述的管道非开挖式修复预处理机器人的三自由度机械臂,其特征在于:所述旋转组件包括弹性挡圈、深沟球轴承、旋转轴以及用于对所述深沟球轴承外圈进行固定支撑的驱动轴承座;所述旋转轴包括成盘状的大头端以及与所述大头端同轴设置的轴段,所述轴段远离所述大头端的一端能穿过所述深沟球轴承的轴承孔并与深沟球轴承的内圈过盈配合,所述轴段上伸出所述轴承孔的部分上设有用于卡接所述弹性挡圈的卡槽。
技术总结
本技术公开了管道非开挖式修复预处理机器人的三自由度机械臂,包括大臂组件、第一角度调节组件、小臂组件、第二角度调节组件、旋转驱动组件和末端执行器;本技术通过采用机械臂末端执行器模块化设计,不仅可以清理管道内部,准备修复区域,提高修复效果的质量和持久性,而且可以根据具体任务需求更换不同的末端执行器,提高了机械臂的灵活性和适用性,末端执行器采用采用气动马达作为末端执行器动力装置,相较于电机来说在高温、高湿等特殊环境中更加可靠稳定,采用关节模组直连设计,简化了机械臂的结构,提高了机械臂的精度和稳定性,而且可以对末端执行器进行三个自由度的调节。
技术研发人员:戴亦军,张微晓,胡安森,李亚勇,秦宗琛,苏晓杰,孙少欣
受保护的技术使用者:中建隧道建设有限公司
技术研发日:20230720
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!