一种履带式管道检测机器人的制作方法
本技术涉及管道检测机器人,具体涉及一种履带式管道检测机器人。
背景技术:
1、现有的管道检测机器人通常是采用轮式底盘,可在干净管道进行检测;但是,当管道内有淤泥及碎石等复杂环境下,轮式底盘则无法进行检测。
技术实现思路
1、本实用新型所要解决的技术问题是提供一种履带式管道检测机器人,旨在解决现有技术中的问题。
2、本实用新型解决上述技术问题的技术方案如下:
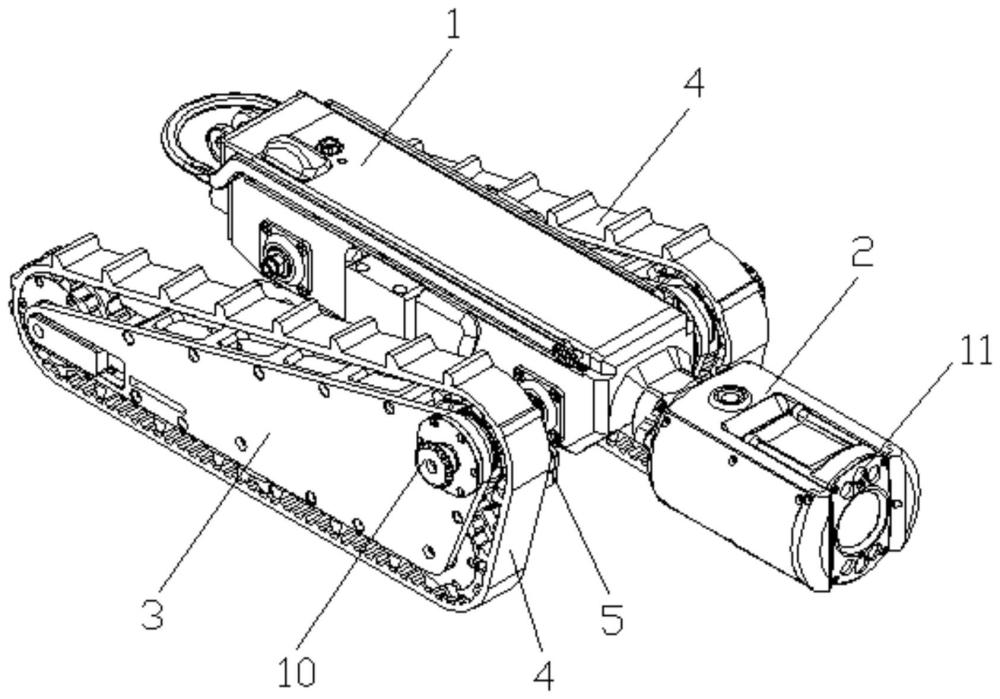
3、一种履带式管道检测机器人,包括机器人本体、摄像头和两个履带底盘组件,所述摄像头固定安装在所述机器人本体的前端,所述机器人本体内安装有驱动组件;两个所述履带底盘组件相对分布在所述机器人本体的两侧,其分别与所述驱动组件可拆卸连接,所述驱动组件用于驱动两个所述履带底盘组件运行以带动所述机器人本体在管道内行走。
4、本实用新型的有益效果是:检测过程中,通过驱动组件驱动两个履带底盘组件运行以带动机器人本体在管道内行走,在此过程中通过摄像头采集管道内的图像,检测方便;
5、该方案通过履带底盘组件进行驱动,可减小压强,增高离地间隙,从而起到防打滑,防坠陷的功能,以便更好的在管道内的行走。
6、本实用新型结构简单,设计合理,可实现在存在淤泥及碎石等工况下的管道内行走,以便进行管道检测,检测方便。
7、在上述技术方案的基础上,本实用新型还可以做如下改进。
8、进一步,每个所述履带底盘组件包括底盘、履带、主动轮和多个从动轮,所述底盘位于所述机器人本体的一侧;所述主动轮和多个所述从动轮分别转动的安装在所述底盘上,且所述主动轮与所述驱动组件可拆卸连接;所述履带套设在所述主动轮和多个所述从动轮上。
9、采用上述进一步方案的有益效果是检测过程中,通过驱动组件驱动两个主动轮转动,两个主动轮分别利用履带带动多个从动轮转动,从而带动机器人本体在管道内行走,在此过程中摄像头采集管道内的图像,检测方便。
10、进一步,所述主动轮位于所述底盘前端的上侧,多个所述从动轮分别位于所述底盘的下侧。
11、采用上述进一步方案的有益效果是结构简单,多个从动轮的分布合理,保证履带能够平稳运行。
12、进一步,所述从动轮的数量为两个,两个所述从动轮分别位于所述底盘下侧的两端。
13、采用上述进一步方案的有益效果是结构简单,两个从动轮的分布合理,保证履带能够平稳运行。
14、进一步,所述从动轮的数量为三个,三个所述从动轮分别位于所述底盘下侧的两端及中部。
15、采用上述进一步方案的有益效果是结构简单,三个从动轮的分布合理,可避免位于底盘下侧中部的从动轮搁浅,保证履带能够平稳运行。
16、进一步,位于所述底盘后端的所述从动轮可沿前后方向移动并定位。
17、采用上述进一步方案的有益效果是结构简单,设计合理,可调整履带的张紧度,保证履带正常转动。
18、进一步,所述底盘上螺纹安装有调节螺杆,所述调节螺杆沿前后方向延伸,并可绕自身的轴向转动;所述调节螺杆的后端与对应所述从动轮转动连接。
19、采用上述进一步方案的有益效果是通过调节上述调节螺杆,并带动对应的从动轮前后一定,从而调整履带的张紧度,保证履带正常转动。
20、进一步,所述调节螺杆上分别滑动套设有弹簧和滑块,所述弹簧的两端分别与对应所述从动轮以及所述滑块的一端抵接,所述滑块的另一端与所述底盘抵接。
21、采用上述进一步方案的有益效果是结构简单,设计合理,利用弹簧可保证对应从动轮能够弹性调节,张紧效果更佳。
22、进一步,所述驱动组件包括两个电机,两个所述电机分别固定安装在所述机器人本体内,其驱动端分别延伸至所述机器人本体的两侧外,并分别与两个所述主动轮可拆卸连接。
23、采用上述进一步方案的有益效果是检测过程中,通过两个电机分别驱动两个主动轮转动,两个主动轮分别利用履带带动多个从动轮转动,从而带动机器人本体在管道内行走,在此过程中摄像头采集管道内的图像,检测方便。
24、进一步,两个所述主动轮内分别穿插有快拆连接轴,两个所述快拆连接轴的一端分别与两个所述电机的驱动端可拆卸连接。
25、采用上述进一步方案的有益效果是结构简单,设计合理,利用快拆连接轴可实现主动轮与电机之间的快速连接,拆装方便,可实现机器人本体与两个履带底盘组件之间的分离。
技术特征:
1.一种履带式管道检测机器人,其特征在于:包括机器人本体(1)、摄像头(2)和两个履带底盘组件,所述摄像头(2)固定安装在所述机器人本体(1)的前端,所述机器人本体(1)内安装有驱动组件;两个所述履带底盘组件相对分布在所述机器人本体(1)的两侧,其分别与所述驱动组件可拆卸连接,所述驱动组件用于驱动两个所述履带底盘组件运行以带动所述机器人本体(1)在管道内行走。
2.根据权利要求1所述的履带式管道检测机器人,其特征在于:每个所述履带底盘组件包括底盘(3)、履带(4)、主动轮(5)和多个从动轮(6),所述底盘(3)位于所述机器人本体(1)的一侧;所述主动轮(5)和多个所述从动轮(6)分别转动的安装在所述底盘(3)上,且所述主动轮(5)与所述驱动组件可拆卸连接;所述履带(4)套设在所述主动轮(5)和多个所述从动轮(6)上。
3.根据权利要求2所述的履带式管道检测机器人,其特征在于:所述主动轮(5)位于所述底盘(3)前端的上侧,多个所述从动轮(6)分别位于所述底盘(3)的下侧。
4.根据权利要求3所述的履带式管道检测机器人,其特征在于:所述从动轮(6)的数量为两个,两个所述从动轮(6)分别位于所述底盘(3)下侧的两端。
5.根据权利要求3所述的履带式管道检测机器人,其特征在于:所述从动轮(6)的数量为三个,三个所述从动轮(6)分别位于所述底盘(3)下侧的两端及中部。
6.根据权利要求4或5所述的履带式管道检测机器人,其特征在于:位于所述底盘(3)后端的所述从动轮(6)可沿前后方向移动并定位。
7.根据权利要求6所述的履带式管道检测机器人,其特征在于:所述底盘(3)上螺纹安装有调节螺杆(7),所述调节螺杆(7)沿前后方向延伸,并可绕自身的轴向转动;所述调节螺杆(7)的后端与对应所述从动轮(6)转动连接。
8.根据权利要求7所述的履带式管道检测机器人,其特征在于:所述调节螺杆(7)上分别滑动套设有弹簧(8)和滑块(9),所述弹簧(8)的两端分别与对应所述从动轮(6)以及所述滑块(9)的一端抵接,所述滑块(9)的另一端与所述底盘(3)抵接。
9.根据权利要求2-5任一项所述的履带式管道检测机器人,其特征在于:所述驱动组件包括两个电机,两个所述电机分别固定安装在所述机器人本体(1)内,其驱动端分别延伸至所述机器人本体(1)的两侧外,并分别与两个所述主动轮(5)可拆卸连接。
10.根据权利要求9所述的履带式管道检测机器人,其特征在于:两个所述主动轮(5)内分别穿插有快拆连接轴(10),两个所述快拆连接轴(10)的一端分别与两个所述电机的驱动端可拆卸连接。
技术总结
本技术涉及一种履带式管道检测机器人,包括机器人本体、摄像头和两个履带底盘组件,摄像头固定安装在机器人本体的前端,机器人本体内安装有驱动组件;两个履带底盘组件相对分布在机器人本体的两侧,其分别与驱动组件可拆卸连接,驱动组件用于驱动两个履带底盘组件运行以带动机器人本体在管道内行走。本技术的有益效果是结构简单,设计合理,可实现在存在淤泥及碎石等工况下的管道内行走,以便进行管道检测,检测方便。
技术研发人员:许争
受保护的技术使用者:武汉特瑞升电子科技有限公司
技术研发日:20230814
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!