一种防侧翻的管道检测机器人的制作方法
本技术涉及防侧翻的管道检测机器人,具体为一种防侧翻的管道检测机器人。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
2、如目前公告号为cn210566985u的专利公开了防侧翻的管道检测机器人,包括机器人本体,机器人本体的上端一侧固定连接有卡线机构,卡线机构的上方设有固定架,固定架的上端插设有拉杆,拉杆的下端固定连接有压板,压板的下端设有第三卡线槽,拉杆的上端转动连接有旋转载盘,旋转载盘的上端固定连接有限位板,本实用新型的有益效果是:本实用新型的机器人本体上设置了卡线机构和固定架,且固定架上设置了带有压板的拉杆,使用时,可将机器人本体上的连接导线卡在卡线机构的第一卡线槽内,并利用压板将连接导线的一部分卡在固定架的底板上,从而固定住连接导线安装在机器人本体上的一端,防止长时间拖动连接导线,使连接导线和机器人本体连接的地方松动而导致接触不良。上述装置虽然解决了导线松动问题,但是依然存在着缺陷。
3、现有的防侧翻的管道检测机器人在进行工作时,由于管道直径不相同,机器人在行驶检测过程中,可能会行驶到管道壁上,从而会造成检测机器人侧翻的现象发生,非常的不方便。
4、针对上述问题,本实用新型提供了一种防侧翻的管道检测机器人。
技术实现思路
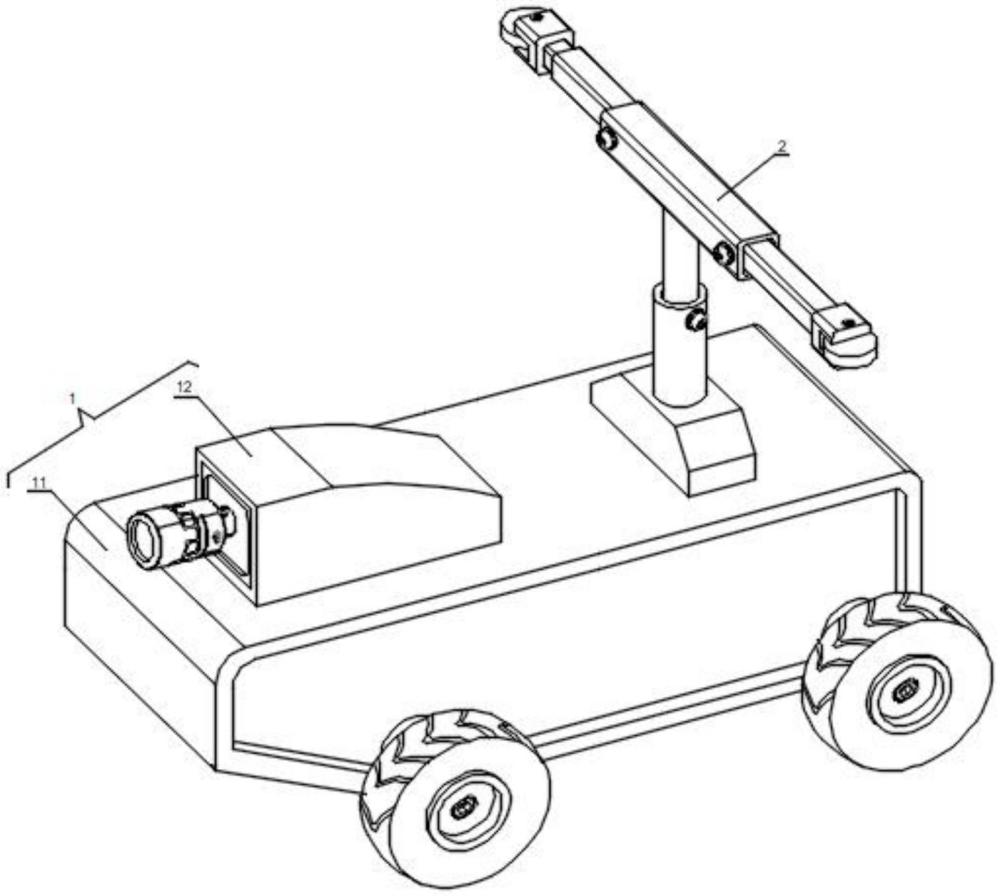
1、本实用新型的目的在于提供一种防侧翻的管道检测机器人,包括检测机器人探车单元和固定安装在检测机器人探车单元上端面的防侧翻定位支撑导向架单元,能够防止机器人行驶到管道壁上造成侧翻的现象发生,从而解决背景技术中的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种防侧翻的管道检测机器人,包括检测机器人探车单元和固定安装在检测机器人探车单元上端面的防侧翻定位支撑导向架单元,所述检测机器人探车单元包括移动小车主体和固定安装在移动小车主体上端面前端的探测摄像头;
3、所述防侧翻定位支撑导向架单元包括固定焊接在移动小车主体上端面的调节架座组件和插接在调节架座组件上端两侧的支撑导向组件。
4、优选地,调节架座组件包括主支撑管座和活动插接安装在主支撑管座上的调节架件。
5、优选地,主支撑管座包括加强座块和固定焊接在加强座块上端的连接管,并在连接管的上端外侧螺纹连接固定螺栓a。
6、优选地,调节架件包括插接在连接管内的支撑柱和固定焊接在支撑柱上端的连接方管,并在连接方管的两端螺纹连接固定螺栓b。
7、优选地,支撑导向组件包括插接方柱和活动连接在插接方柱一端的导向轮件,且在插接方柱的一端开设有用于连接导向轮件的安装槽口。
8、优选地,导向轮件包括槽口安装块和固定焊接在槽口安装块一端的插接块,且在槽口安装块的槽口内轴接有导轮,并在插接块的一端固定焊接复位弹簧,插接块活动插接在安装槽口内,且复位弹簧的另一端固定焊接在安装槽口内。
9、与现有技术相比,本实用新型的有益效果如下:
10、1、本实用新型提供的一种防侧翻的管道检测机器人,将安装有导轮的槽口安装块通过插接块活动安装在插接方柱上,且插接方柱活动插接在调节架件设置的连接方管内,当移动小车主体在管道内行驶时,可根据管道直径进行调节插接方柱伸出连接方管的长度,使得导向轮件能够贴合在管道内壁对车体进行防侧翻支撑,且能够使移动小车主体行驶在管道的中心轴线上不会偏移到管道侧壁。
11、2、本实用新型提供的一种防侧翻的管道检测机器人,将支撑柱活动插接在加强座块上端的连接管内,同时将插接方柱活动插接在连接方管内,使得防侧翻定位支撑导向架单元的纵向高度和横向长度均能够得到调节,方便根据管道直径进行调节使用。
技术特征:
1.一种防侧翻的管道检测机器人,包括检测机器人探车单元(1)和固定安装在检测机器人探车单元(1)上端面的防侧翻定位支撑导向架单元(2),其特征在于:所述检测机器人探车单元(1)包括移动小车主体(11)和固定安装在移动小车主体(11)上端面前端的探测摄像头(12);
2.根据权利要求1所述的一种防侧翻的管道检测机器人,其特征在于:所述调节架座组件(21)包括主支撑管座(211)和活动插接安装在主支撑管座(211)上的调节架件(212)。
3.根据权利要求2所述的一种防侧翻的管道检测机器人,其特征在于:所述主支撑管座(211)包括加强座块(201)和固定焊接在加强座块(201)上端的连接管(202),并在连接管(202)的上端外侧螺纹连接固定螺栓a(203)。
4.根据权利要求3所述的一种防侧翻的管道检测机器人,其特征在于:所述调节架件(212)包括插接在连接管(202)内的支撑柱(204)和固定焊接在支撑柱(204)上端的连接方管(205),并在连接方管(205)的两端螺纹连接固定螺栓b(206)。
5.根据权利要求1、2、3或4所述的一种防侧翻的管道检测机器人,其特征在于:所述支撑导向组件(22)包括插接方柱(221)和活动连接在插接方柱(221)一端的导向轮件(222),且在插接方柱(221)的一端开设有用于连接导向轮件(222)的安装槽口(2211)。
6.根据权利要求5所述的一种防侧翻的管道检测机器人,其特征在于:所述导向轮件(222)包括槽口安装块(2221)和固定焊接在槽口安装块(2221)一端的插接块(2222),且在槽口安装块(2221)的槽口内轴接有导轮(2223),并在插接块(2222)的一端固定焊接复位弹簧(2224),插接块(2222)活动插接在安装槽口(2211)内,且复位弹簧(2224)的另一端固定焊接在安装槽口(2211)内。
技术总结
本技术涉及防侧翻的管道检测机器人技术领域,公开了一种防侧翻的管道检测机器人,包括检测机器人探车单元和固定安装在检测机器人探车单元上端面的防侧翻定位支撑导向架单元,将安装有导轮的槽口安装块通过插接块活动安装在插接方柱上,且插接方柱活动插接在调节架件设置的连接方管内,当移动小车主体在管道内行驶时,可根据管道直径进行调节插接方柱伸出连接方管的长度,使得导向轮件能够贴合在管道内壁对车体进行防侧翻支撑,且能够使移动小车主体行驶在管道的中心轴线上不会偏移到管道侧壁。
技术研发人员:朱冬,张建,唐国梅,李欣
受保护的技术使用者:七腾机器人有限公司
技术研发日:20230918
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!