谐波齿轮装置及其制造方法以及机器人用关节装置与流程
本公开涉及齿轮装置领域,特别是涉及一种谐波齿轮装置及其制造方法、以及机器人用关节装置。
背景技术:
1、专利文献1(日本专利特开2006-97861号公报)中有与礼帽型谐波齿轮装置相关的公开。该谐波齿轮装置具备形成有内齿的环状的刚性内齿齿轮(刚轮)、具有局部地啮合于内齿的外齿且设置在刚性内齿齿轮的内侧的柔性外齿齿轮(柔轮)、以及设置在柔性外齿齿轮的内侧且使柔性外齿齿轮一边挠曲一边相对于刚性内齿齿轮而旋转的谐波发生器(波发生器)。
2、该谐波齿轮装置例如是在刚性内齿齿轮、柔性外齿齿轮、谐波发生器分别固定于工业机器人的壳体、输出轴、输入轴的状态下使用。在此状态下,当从输入轴对谐波发生器输入旋转运动时,在内部对输入至谐波发生器的旋转运动进行减速并从柔性外齿齿轮输出至输出轴。
3、但是,在所述谐波齿轮装置中,例如为了谋求刚性内齿齿轮与柔性外齿齿轮的同心度的提高而实现规定性能,要求提高装配精度,但是根据作业者的熟练度等,装配精度有时会产生偏差。
技术实现思路
1、本公开目的在于提供一种容易实现规定性能的谐波齿轮装置、谐波齿轮装置的制造方法以及机器人用关节装置。
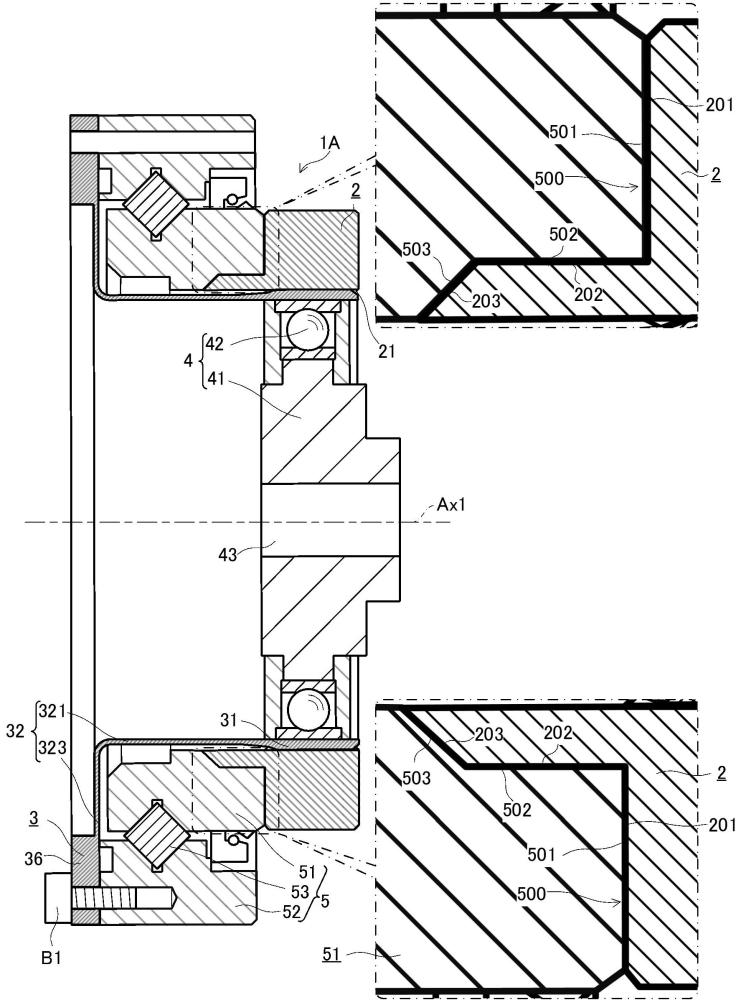
2、本公开的一形态的谐波齿轮装置包括刚性内齿齿轮、柔性外齿齿轮及谐波发生器。所述刚性内齿齿轮是具有内齿的环状零件。所述柔性外齿齿轮是具有外齿且配置在所述刚性内齿齿轮的内侧的环状零件。所述谐波发生器具有以旋转轴为中心受到旋转驱动的非圆形状的凸轮、以及安装在所述凸轮的外侧的轴承。所述谐波发生器设置在所述柔性外齿齿轮的内侧,使所述柔性外齿齿轮产生挠曲。所述谐波齿轮装置伴随所述凸轮的旋转而使所述柔性外齿齿轮发生变形,使所述外齿的一部分啮合于所述内齿的一部分,根据所述柔性外齿齿轮与所述刚性内齿齿轮的齿数差使所述柔性外齿齿轮相对于所述刚性内齿齿轮相对地旋转。所述谐波齿轮装置具有轴承构件和结合第1零件与第2零件的摩擦压接部,所述刚性内齿齿轮与所述柔性外齿齿轮固定于所述轴承构件上,所述第1零件为所述刚性内齿齿轮,所述第2零件为所述轴承构件的内轮。
3、本公开的一形态的谐波齿轮装置的制造方法是所述谐波齿轮装置的制造方法,其包括:结合工序,利用所述摩擦压接部来结合所述第1零件与所述第2零件;以及定心工序,在所述结合工序后,设定所述第1零件及所述第2零件的旋转中心。
4、本公开的一形态的机器人用关节装置包括所述谐波齿轮装置、固定于所述刚性内齿齿轮的第1构件以及固定于所述柔性外齿齿轮的第2构件。
5、根据本公开,有下述优点:能够提供容易实现规定性能的谐波齿轮装置、谐波齿轮装置的制造方法以及机器人用关节装置。
技术特征:
1.一种谐波齿轮装置,其特征在于,包括:环状的刚性内齿齿轮、环状的柔性外齿齿轮、谐波发生器、摩擦压接部和轴承构件;所述刚性内齿齿轮与所述柔性外齿齿轮固定于所述轴承构件上,所述刚性内齿齿轮具有内齿,所述柔性外齿齿轮具有外齿,且设置在所述刚性内齿齿轮的内侧,所述摩擦压接部用于将第1零件与第2零件结合在一起,所述第1零件为所述刚性内齿齿轮,所述第2零件为所述轴承构件的内轮,所述谐波发生器具有以旋转轴为中心受到旋转驱动的非圆形状的凸轮以及安装在所述凸轮的外侧的轴承,所述谐波发生器设置在所述柔性外齿齿轮的内侧以使所述柔性外齿齿轮产生挠曲;
2.根据权利要求1所述谐波齿轮装置,其特征在于,所述摩擦压接部至少将所述第1零件平行于所述旋转轴的轴向上的第一表面与所述第2零件平行于所述旋转轴的轴向上的第二表面结合在一起,所述第一表面与所述第二表面相对设置。
3.根据权利要求1所述谐波齿轮装置,其特征在于,所述摩擦压接部至少将所述第1零件垂直于所述旋转轴的径向上的第一周面与所述第2零件垂直于所述旋转轴的径向上的第二周面结合在一起,所述第一周面与所述第二周面相对设置。
4.根据权利要求1所述谐波齿轮装置,其特征在于,所述摩擦压接部至少将所述第1零件相对于所述旋转轴倾斜的第一倾斜面与所述第2零件相对于所述旋转轴倾斜的第二倾斜面结合在一起。
5.根据权利要求1所述谐波齿轮装置,其特征在于,所述摩擦压接部遍布所述旋转轴的整周将所述第1零件与所述第2零件结合在一起。
6.一种谐波齿轮装置的制造方法,用于制造如权利要求1所述谐波齿轮装置,其特征在于包括:
7.一种机器人用关节装置,其特征在于包括:权利要求1所述谐波齿轮装置,固定于所述刚性内齿齿轮的第1构件,以及固定于所述柔性外齿齿轮的第2构件。
技术总结
本发明涉及齿轮装置领域,本发明涉提供一种谐波齿轮装置及其制造方法以及机器人用关节装置。谐波齿轮装置具备刚性内齿齿轮、柔性外齿齿轮及谐波发生器。谐波齿轮装置使柔性外齿齿轮伴随凸轮的旋转变形,使外齿的一部分啮合于内齿的一部分,根据柔性外齿齿轮与刚性内齿齿轮的齿数差使柔性外齿齿轮相对于刚性内齿齿轮相对地旋转。谐波齿轮装置具有轴承构件和结合第1零件与第2零件的摩擦压接部。通过上述方式,能够提供容易实现规定性能的谐波齿轮装置、谐波齿轮装置的制造方法以及机器人用关节装置。
技术研发人员:田中雅之,赵盛,章浏明,王刚
受保护的技术使用者:广东极亚精机科技有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!