齿轮部件、内啮合行星齿轮装置以及机器人用关节装置的制作方法
本申请涉及齿轮装置领域,特别是涉及一种齿轮部件、内啮合行星齿轮装置、机器人用关节装置以及内啮合行星齿轮装置的制造方法。
背景技术:
1、在现有技术中,已知的内啮合行星齿轮装置(摆动内啮合行星齿轮机构)包括通过偏心体相对于输入轴在可偏心旋转状态安装的多个行星齿轮(外齿轮)、以及与该多个行星齿轮内啮合的内齿轮(例如,参见专利文献1:日本特开2002-130395号公报)。该内啮合行星齿轮装置通过仅传递行星齿轮的旋转分量将输出轴连接到行星齿轮,从而使输出轴相对于输入轴以预定的减速比旋转。因此包括多个行星齿轮,内啮合行星齿轮装置能够增加传递的扭矩容量。
2、当制造现有技术的内啮合行星齿轮装置时,多种材料在堆叠状态下同时加工外齿来制造多个行星齿轮。即,内啮合行星齿轮装置中的多个行星齿轮的外齿不是单独形成的,而是通过集中加工形成的。
3、在上述现有技术的结构中,在加工外齿时,需要将多个行星齿轮(材料)以堆叠的状态固定,因此如果将多个行星齿轮牢固地固定以使其不移位,可能会出现行星齿轮变形等问题。
技术实现思路
1、本发明的目的在于提供一种在外齿加工时不易产生变形的齿轮部件、内啮合行星齿轮装置、机器人用关节装置以及内啮合行星齿轮装置的制造方法。
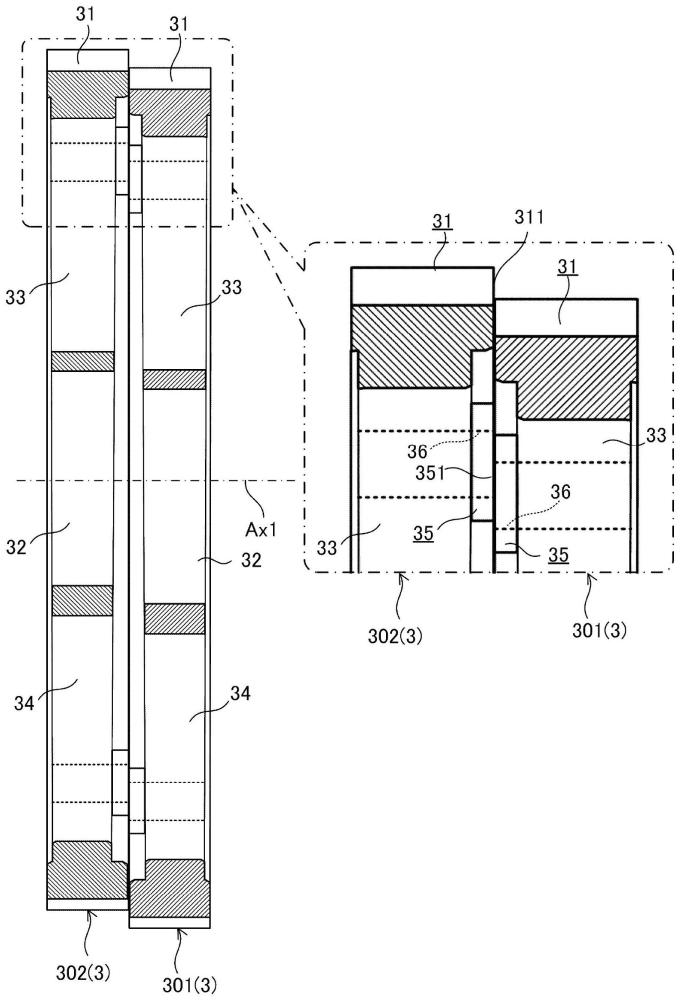
2、本发明一个实施方式的齿轮部件是用作内啮合行星齿轮装置中的行星齿轮的齿轮部件。所述内啮合行星齿轮装置包括内齿轮和多个所述行星齿轮。所述内齿轮具有内齿。所述行星齿轮具有与所述内齿部分啮合的外齿。所述内啮合行星齿轮装置通过摆动多个所述行星齿轮而使所述多个行星齿轮相对于所述内齿轮以所述内齿轮的旋转轴为中心旋转。所述齿轮部件具有从沿着所述旋转轴的轴向上的至少一个表面突出的凸台部。
3、本发明一个实施方式的内啮合行星齿轮装置包括包括具有内齿的内齿轮和具有外齿的多个行星齿轮,所述外齿与所述内齿部分啮合,所述内啮合行星齿轮装置通过使多个所述行星齿轮摆动而使多个所述行星齿轮相对于所述内齿轮以所述内齿轮的旋转轴为中心进行相对转动,所述行星齿轮为所述齿轮部件。
4、本发明一个实施方式的机器人用关节装置包括所述内啮合行星齿轮装置、第一部件和第二部件,所述第一部件固定在所述内齿轮上,随着所述行星齿轮相对于所述内齿轮的旋转所述第二部件相对于所述第一部件旋转。
5、本发明一个实施方式的内啮合行星齿轮装置的制造方法包括,在所述多个行星齿轮在所述轴向上彼此堆叠结合在一起的状态下,集中加工多所述个行星齿轮的集中加工步骤。
6、本发明能够提供一种在外齿加工时不易发生变形的齿轮部件、内啮合行星齿轮装置、机器人用关节装置以及内啮合行星齿轮装置的制备方法。
技术特征:
1.一种齿轮部件,作为内啮合行星齿轮装置中的行星齿轮使用,所述内啮合行星齿轮装置包括具有内齿的内齿轮和具有外齿的多个所述行星齿轮,所述外齿与所述内齿部分啮合,所述内啮合行星齿轮装置通过使多个所述行星齿轮摆动而使多个所述行星齿轮相对于所述内齿轮以所述内齿轮的旋转轴为中心进行相对转动,其特征在于,所述齿轮部件具有从沿着所述旋转轴的轴向的至少一个表面突出的凸台部。
2.根据权利要求1所述的齿轮部件,其特征在于,所述凸台部具有缔结孔。
3.根据权利要求1或2所述的齿轮部件,其特征在于,所述凸台部的顶面与所述外齿的端面位于同一平面上。
4.一种内啮合行星齿轮装置,包括具有内齿的内齿轮和具有外齿的多个行星齿轮,所述外齿与所述内齿部分啮合,所述内啮合行星齿轮装置通过使多个所述行星齿轮摆动而使多个所述行星齿轮相对于所述内齿轮以所述内齿轮的旋转轴为中心进行相对转动,其特征在于,所述行星齿轮为权利要求1或2的所述齿轮部件。
5.一种机器人用关节装置,包括权利要求4所述的内啮合行星齿轮装置、第一部件和第二部件,所述第一部件固定在内齿轮上,伴随所述行星齿轮相对于所述内齿轮相对旋转所述第二部件相对于所述第一部件旋转。
6.一种内啮合行星齿轮装置的制造方法,为权利要求4所述的内啮合行星齿轮装置的制备方法,包括在多个所述行星齿轮沿所述轴向彼此堆叠结合的状态下集中加工所述多个行星齿轮的集中加工工艺。
7.根据权利要求6所述的内啮合行星齿轮装置的制造方法,在所述集中加工工艺中,利用所述凸台部在所述轴向上紧固多个所述行星齿轮。
技术总结
本发明涉及齿轮装置领域,本发明提供一种齿轮部件、内啮合行星齿轮以及机器人用关节装置。一种内啮合行星齿轮装置包括内齿轮和多个行星齿轮。内啮合行星齿轮装置通过使多个行星齿轮摆动,使多个行星齿轮相对于内齿轮以旋转轴Ax1为中心旋转。作为行星齿轮使用的齿轮部件具有从沿着旋转轴线Ax1的轴向上的至少一个表面突出的凸台部。通过上述方式,形成了外齿等加工时不易产生变形的齿轮部件、内啮合行星齿轮以及机器人用关节装置。
技术研发人员:王刚,章浏明,陈刚,吴达祺
受保护的技术使用者:广东极亚精机科技有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!