一种自适应管内蠕动机器人
本发明涉及移动机器人,尤其涉及一种自适应管内蠕动机器人。
背景技术:
1、对于管道内壁的移动机器人工业上有较大的应用需求。无论是大型的管道如天然气管、油罐、烟囱的检修,还是小型的如水管、排污管清淤排障,对于设计和开发管道内壁移动机器人都有较大需求。柔性的管道内壁移动机器人在生物工程领域同样有应用需求,如食道、肛道检查,血管除栓等。因而高自适应性的管道内壁的移动机器人有广泛的需求和市场价值。除此之外,对于一些狭长管道,竖直管道而言,一些利用外部能源、外部气源等方案不能很好的适用。其原因在于,这些机方案需要拖拽电缆、气管等外设,这些外设本身具有相当重量,造成机器人负荷更大,并且可能在机器人退出管道的过程中,因为其不能控制,而产生打结、堵死。因此,除了高自适应性以外,还需要能实现无外设这一需求,才能广泛应用。中国专利公开号为cn110142783a提供了用于腔肠、管道或爬墙的中空式气囊蠕动机器人,其实也是一种纯气动方案,其主要针对生物管道等小型柔性对象。其提供的说明书中,没有展示气源的供应示意图。实际上,该方案需要拖拽至少三根气体输送管,并通过末端的泵阀缸进行控制,才能实现其驱动,因此不能解决无外设这一技术问题,并且机器人本体很可能在工作中由于刚性差而扭转,进而堵塞,并且机器人在退出时可能导致通气管打结等。除此之外,该方案需要针对不同的工况独立定制,不能实现模块化组装。更有甚者,在对于一些大直径变化的管道来说,其充放气时间较长,效率低下。
技术实现思路
1、本发明实施例所要解决的技术问题在于,提供一种自适应管内蠕动机器人,可实现高自适应性地在管内蠕动。
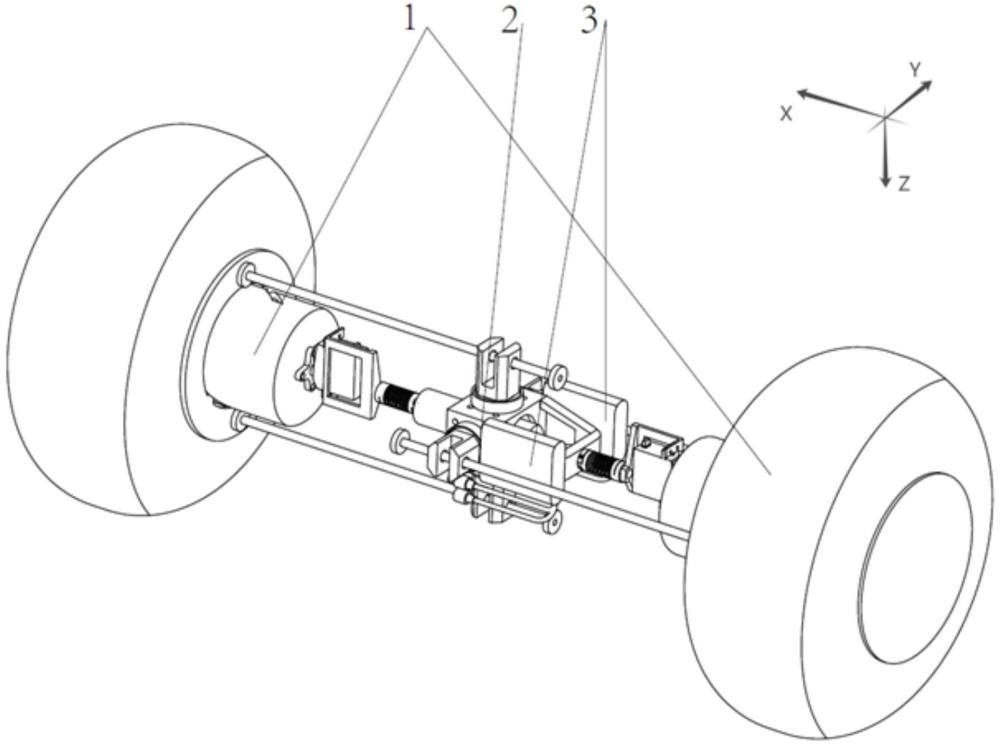
2、为了解决上述技术问题,本发明实施例提供了一种自适应管内蠕动机器人,包括伸缩致动单元、两个气囊变形装置,所述两个气囊变形装置连接于所述伸缩致动单元的两端,所述气囊变形装置包括轮状的气囊、导槽转轴、气囊压板,所述气囊的一侧通孔与所述导槽转轴转动连接,另一侧通孔与所述气囊压板固定连接,所述气囊压板与所述导槽转轴伸缩配合,所述伸缩致动单元用于联动所述两个气囊变形装置交替蠕动。
3、进一步地,所述导槽转轴侧壁上具有螺旋槽,所述气囊压板具有横向的导柱,所述导柱穿设于所述螺旋槽之间。
4、进一步地,所述气囊变形装置还包括压力传感器,所述压力传感器贴合于所述导槽转轴表面,用于测量所述气囊中的压力。
5、进一步地,所述气囊变形装置还包括舵机,所述舵机固定设置于所述伸缩致动单元的端面上,并驱动所述导槽转轴与所述气囊压板产生相对转动。
6、进一步地,所述伸缩致动单元包括舵机安装架、挠性传动结、电磁铁致动器、电磁铁外壳架,所述电磁铁致动器安装于所述电磁铁外壳架中,所述挠性传动结为两个且分别背向地设置于所述电磁铁致动器的推杆端部上和所述磁铁外壳架的端部上,所述挠性传动结设置有所述舵机安装架,所述舵机安装于所述舵机安装架上。
7、进一步地,所述伸缩致动单元包括两对导向消转杆,所述两对导向消转杆分别设置于所述电磁铁外壳架与其两侧的两个气囊变形装置的气囊压板之间。
8、进一步地,所述气囊压板与一对所述导向消转杆的一端部之间为固定连接。
9、进一步地,所述导向消转杆的另一端部与所述电磁铁外壳架之间通过端面轴承连接。
10、进一步地,所述两对导向消转杆以正交方向设置于所述电磁铁外壳架的四个侧面上。
11、进一步地,所述伸缩致动单元还包括导杆座,所述导杆座底部与所述端面轴承连接,所述导向消转杆滑动穿设于所述导杆座的滑动孔
12、实施本发明实施例,具有如下有益效果:本发明能够在无外设的前提下实现高自适应性的管内蠕动。能够实现模块化组装,以适应不同工况。机器人整体具有一定的刚性,进而可以减少整体扭转的发生。可以通过机械结构驱动气囊变形,变形速度快;能够实现机器人在不同截面形状、不同截面尺寸管道的可控运动;能够实现机器人在小曲率弯曲管道的通过;能够实现机器人在非水平管道的攀爬;能够实现机器人在硬质及柔性管道可控运动;能够对其气囊失效进行监测;具有较高的工程应用柔性能够方便的应用到不同工程需求。
技术特征:
1.一种自适应管内蠕动机器人,其特征在于,包括伸缩致动单元、两个气囊变形装置,所述两个气囊变形装置连接于所述伸缩致动单元的两端,所述气囊变形装置包括轮状的气囊、导槽转轴、气囊压板,所述气囊的一侧通孔与所述导槽转轴转动连接,另一侧通孔与所述气囊压板固定连接,所述气囊压板与所述导槽转轴伸缩配合,所述伸缩致动单元用于联动所述两个气囊变形装置交替蠕动。
2.根据权利要求1所述的自适应管内蠕动机器人,其特征在于,所述导槽转轴侧壁上具有螺旋槽,所述气囊压板具有横向的导柱,所述导柱穿设于所述螺旋槽之间。
3.根据权利要求1所述的自适应管内蠕动机器人,其特征在于,所述气囊变形装置还包括压力传感器,所述压力传感器贴合于所述导槽转轴表面,用于测量所述气囊中的压力。
4.根据权利要求1所述的自适应管内蠕动机器人,其特征在于,所述气囊变形装置还包括舵机,所述舵机固定设置于所述伸缩致动单元的端面上,并驱动所述导槽转轴与所述气囊压板产生相对转动。
5.根据权利要求4所述的自适应管内蠕动机器人,其特征在于,所述伸缩致动单元包括舵机安装架、挠性传动结、电磁铁致动器、电磁铁外壳架,所述电磁铁致动器安装于所述电磁铁外壳架中,所述挠性传动结为两个且分别背向地设置于所述电磁铁致动器的推杆端部上和所述磁铁外壳架的端部上,所述挠性传动结设置有所述舵机安装架,所述舵机安装于所述舵机安装架上。
6.根据权利要求5所述的自适应管内蠕动机器人,其特征在于,所述伸缩致动单元包括两对导向消转杆,所述两对导向消转杆分别设置于所述电磁铁外壳架与其两侧的两个气囊变形装置的气囊压板之间。
7.根据权利要求6所述的自适应管内蠕动机器人,其特征在于,所述气囊压板与一对所述导向消转杆的一端部之间为固定连接。
8.根据权利要求7所述的自适应管内蠕动机器人,其特征在于,所述导向消转杆的另一端部与所述电磁铁外壳架之间通过端面轴承连接。
9.根据权利要求8所述的自适应管内蠕动机器人,其特征在于,所述两对导向消转杆以正交方向设置于所述电磁铁外壳架的四个侧面上。
10.根据权利要求8所述的自适应管内蠕动机器人,其特征在于,所述伸缩致动单元还包括导杆座,所述导杆座底部与所述端面轴承连接,所述导向消转杆滑动穿设于所述导杆座的滑动孔。
技术总结
本发明公开了一种自适应管内蠕动机器人,包括伸缩致动单元、两个气囊变形装置,两个气囊变形装置连接于所述伸缩致动单元的两端,所述气囊变形装置包括轮状的气囊、导槽转轴、气囊压板,所述气囊的一侧通孔与所述导槽转轴转动连接,另一侧通孔与所述气囊压板固定连接,所述气囊压板与所述导槽转轴伸缩配合,所述伸缩致动单元用于联动所述两个气囊变形装置交替蠕动。本发明通过气囊变形装置不需要外部气源调节而适应不同管径,通过气囊变形、整体弯曲实现小曲率弯曲管道的自适应通过,通过独立控制气囊变形装置可以实仿生节律运动,通过简单的柔性装配可以适应不同尺寸下的应用需求。通过模块化的装配可以实现若干个机器人的串联进而适应不同工况。
技术研发人员:张兴伟,麦卓锐,丁嘉懿,唐浩,陈剑桥,刘兴,曹宇航
受保护的技术使用者:汕头大学
技术研发日:
技术公布日:2024/5/9
- 还没有人留言评论。精彩留言会获得点赞!