一种安瓿瓶自动开瓶装置的制作方法
1.本发明涉及一种安瓿瓶自动开瓶装置。
背景技术:
2.安瓿瓶是一种可熔封的硬质玻璃容器,常用于存放注射用的药物以及疫苗、血清。目前市场上的安瓿瓶的开瓶其,只具备切割功能,安瓿瓶的消毒及掰开均是由人工完成。
3.由于在配药过程中需要大量的掰开安瓿瓶,开瓶动作操作频繁,长期重复快速、用力地掰开同一个动作,会造成操作人员关节发生腱鞘炎、疼痛、活动受阻力等职业性损伤,同时消耗一定的人力资源问题。
技术实现要素:
4.针对上述问题,本发明的目的是提供一种安瓿瓶自动开瓶装置,能够自动完成安瓿瓶的消毒和开瓶,解放了操作人员,从而避免了操作人员由于长期重复开瓶动作,发生关节发生腱鞘炎、疼痛、活动受阻力等职业性损伤,同时节省了人力资源。
5.为实现上述目的,本发明采取以下技术方案:
6.一种安瓿瓶自动开瓶装置,包括:
7.传送机构,设有传送带,所述传送带上间隔设置有多个用于放置安瓿瓶的瓶座;
8.消毒机构,固定设置在所述传送机构上,所述传送带穿过所述消毒机构;
9.掰瓶机构;固定设置在所述传送机构上,位于所述消毒机构的后部,用于自动掰开所述安瓿瓶;
10.控制器,与所述传送机构、所述消毒机构和所述掰瓶机构电连接,用于控制所述传送机构、所述消毒机构和所述掰瓶机构的运动。
11.优选地,所述瓶座内设有上下两道用于夹持所述安瓿瓶的橡胶圈。
12.优选地,所述消毒机构包括消毒间,所述消毒间跨过所述传送带固定在所述传送机构的底座上,所述消毒间内设置有多个紫外灯,所述传送带穿过所述消毒间。
13.优选地,所述掰瓶机构包括掰瓶机械手,所述掰瓶机械手的末端安装有掰瓶器,所述掰瓶机械手安装在所述传送机构的底座一侧。
14.优选地,所述掰瓶器为能开合的电动夹具。
15.优选地,所述电动夹具的夹持部为曲面,所述电动夹具合并后,所述曲面与所述安瓿瓶头部向贴合。
16.优选地,所述夹持部为具有弹性的软质件。
17.优选地,所述夹持部的下端设有切割片。
18.优选地,所述传送机构的末端安装有用于检测所述安瓿瓶是否在所述瓶座中的检测机构,所述检测机构与所述控制器连接。
19.优选地,所述检测机构为对射的光电传感器,所述光电传感器的发射端和接收端分别安装在所述传送机构的两侧。
20.本发明由于采取以上技术方案,其具有以下优点:
21.1、本发明的安瓿瓶自动开瓶装置,通过传送机构、消毒机构和掰瓶机构结合,自动完成安瓿瓶的消毒和开瓶,解放了操作人员,提高了开瓶效率,同时节省了人力资源。
22.2、本发明的安瓿瓶自动开瓶装置,通过检测机构能够防止掰后的安瓿瓶从传送带中掉落。
附图说明
23.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。在整个附图中,用相同的附图标记表示相同的部件。在附图中:
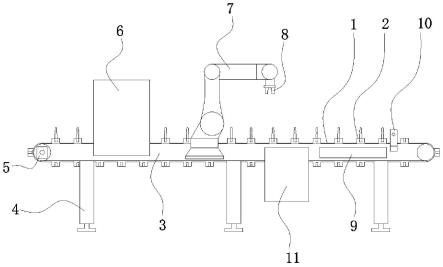
24.图1是本发明一实施例的安瓿瓶自动开瓶装置的结构示意图;
25.图2是本发明该实施例的安瓿瓶自动开瓶装置的俯视示意图;
26.图3是本发明该实施例的瓶座的结构示意图;
27.图4是本发明该实施例的掰瓶器的结构示意图;
28.图5是本发明该实施例的掰瓶器的局部放大图。
29.附图中各标记表示如下:
30.1为传送带,2为瓶座,3为底座,4为支撑腿,5为驱动电机,6为消毒间,7为掰瓶机械手,8为掰瓶器,801为夹持部,802为盲孔,803为压缩弹簧,804为切割片,9为控制器,10为光电传感器,11为垃圾桶。
具体实施方式
31.下面将参照附图更详细地描述本发明的示例性实施方式。虽然附图中显示了本发明的示例性实施方式,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了能够更透彻地理解本发明,并且能够将本发明的范围完整的传达给本领域的技术人员。
32.本发明提供的安瓿瓶自动开瓶装置,通过传送机构、消毒机构和掰瓶机构结合,自动完成安瓿瓶的消毒和开瓶,解放了操作人员,提高了开瓶效率,同时节省了人力资源。
33.下面,结合附图对本发明实施例提供的安瓿瓶自动开瓶装置进行详细的说明。
34.实施例
35.如图1和图2所示,本实施例提供的安瓿瓶自动开瓶装置,包括传送机构、消毒机构和掰瓶机构,传送机构设有传送带1,传送带1可以为皮带,传送带1上间隔设置有多个用于放置安瓿瓶的瓶座2;操作时,操作人员将安瓿瓶插入到瓶座2内,安瓿瓶的下部位于瓶座2中。传送机构还包括底座3、底座3有支撑腿4支撑,支撑腿4的底部安装有可调支撑脚,用于调平底座3。底座3的两端设有驱动轮和从动轮,传送带1绕设在驱动轮和从动轮,驱动轮与驱动电机5的输出轴通过减速器连接,驱动电机5的转动带动传送带1的运动。
36.消毒机构固定设置在传送机构上,消毒机构固定安装在底座3上,传送带1穿过消毒机构;具体地,消毒机构包括消毒间6为两端开口的房间,消毒间6为外形长方体,传送带1从两端开口处进出,消毒间6内顶部和侧壁设置有多个紫外灯,用于对进入消毒间6的安瓿瓶消毒。消毒间6内部表面处理成镜面,可以多次反射紫外光照射到安瓿瓶上,紫外灯消毒
的利用率。
37.掰瓶机构固定设置在传送机构的底座3上,位于消毒机构的后部,安瓿瓶经过消毒后,被传送带1输送到掰瓶机构位置,掰瓶机构用于自动掰开安瓿瓶的头部;具体地,掰瓶机构包括掰瓶机械手7,掰瓶机械手7的末端安装有掰瓶器8,掰瓶机械手7固定安装在传送机构的一侧,具体地,掰瓶机械手7固定在底座3上。传送带1上安瓿瓶的位置位于掰瓶机械手7的工作范围内;掰瓶机械手7的工作范围内,传送机构上可以安装有接近开关,当瓶座2移动到接近开关的位置时,接近开关发送信号给控制器9,控制器9发送暂停信号给传送带1,传送带1停止运动;同时,控制器9发送机器人启动信号给掰瓶机械手7,掰瓶机械手7带动掰瓶器8进行掰瓶工作,当掰瓶结束后,掰瓶机械手7发送掰瓶完成信号给控制器9,控制器9在发送传送带启动信号给传送带1,传送带1带动掰过的安瓿瓶行前移动。
38.其中,掰瓶机械手7可以为六轴机械手,可是实现六个自由度的活动,运动更加灵活。
39.控制器9安装在传送机构的一侧,用于控制传送机构、消毒机构和掰瓶机构的运动,控制器9与传送机构、消毒机构和掰瓶机构通过线缆连接。
40.如图3所示,本实施中,瓶座2内上下位置开设有两道密封槽,密封槽内嵌设有密封圈,密封圈突出密封槽,密封槽为橡胶圈,用于夹持安瓿瓶,橡胶圈具有弹性,使安瓿瓶在瓶座2中更加稳定,同时操作人员将安瓿瓶插入到瓶座2时,也较容易。
41.本实施中,瓶座2内可以嵌设不同内径的衬套,满足不同尺寸的安瓿瓶的掰瓶操作。
42.本实施中,掰瓶器8为能开合的电动夹具,掰瓶器8与掰瓶机械手7的控制器连接,掰瓶机械手7可以控制掰瓶器8的开合动作。掰瓶器8的内侧为夹持部801,夹持部801的夹持面为曲面,电动夹具合并后,曲面与安瓿瓶头部向贴合。夹持部为具有弹性的软质件,具体可以为橡胶件,能够避免损伤安瓿瓶的头部。
43.如图4和图5所示,夹持部801的下端开设有盲孔802,盲孔802内设有压缩弹簧803,切割片804与压缩弹簧803连接,在电动夹具合并后,在压缩弹簧803的作用下,切割片804抵住安瓿瓶的颈部。具体应用中,当切割片804抵住安瓿瓶的颈部后,掰瓶机械手7带动掰瓶器8以安瓿瓶的中心线为轴线转动,实现对安瓿瓶颈部的切割。
44.本实施中,传送机构的末端安装有用于检测安瓿瓶是否在瓶座中的检测机构,检测机构与控制器9连接。检测机构为对射的光电传感器10,光电传感器10的发射端和接收端分别安装在传送机构的两侧,发射端和接收端的高度相等,发射端发出的光线高于瓶座2的顶面,低于安瓿瓶的颈部,既,经过检测机构的瓶座2内如果有安瓿瓶,就会遮挡住发射端和接收端之间的光线;如经过检测机构的瓶座2内如果没有安瓿瓶,发射端和接收端之间的光线就不会中断;在具体应用中,光电传感器10的光线被中断的瞬间,光电传感器10发送中断信号给控制器9,控制器9接收到光电传感器10的中断信号后,控制器9发送暂停工作的信号给传送带1和掰瓶机械手7,传送带1和掰瓶机械手7将停止工作;从而保障已经掰过瓶头的安瓿瓶不会从传送带1上掉落。
45.本实施中,传送机构的一侧安装有垃圾桶11,垃圾桶11为顶部开口的塑料桶,垃圾桶11可以通过挂钩挂设在传送机构的侧面,方便垃圾桶11后期的清洁与更换;垃圾桶11内套设有垃圾袋,垃圾桶11位于掰瓶机械手7的工作范围内。当掰瓶机械手7掰完安瓿瓶的瓶
头后,移动至垃圾桶11的上部,掰瓶器8打开,安瓿瓶的瓶头掉落至,垃圾桶11内。
46.本实施的安瓿瓶自动开瓶装置工作时,在消毒机构的前部操作人员不断的将安瓿瓶插入到瓶座2内,在传送带1的带动下,安瓿瓶进入到消毒间6内,安瓿瓶内经过紫外光照射,对露在瓶座2外部的部分进行消毒;经过消毒后的安瓿瓶被输送到掰瓶机械手7的工作位置,掰瓶机械手7带动掰瓶器8移动到安瓿瓶的上方,掰瓶器8打开后,向下移动,在夹持部801夹紧安瓿瓶前,切割片804与安瓿瓶的瓶颈接触,掰瓶机械手7的末端轴带动掰瓶器8以安瓿瓶的中心线为轴线转动一周,完成安瓿瓶的切割,掰瓶器8完全闭合,夹持部801夹紧安瓿瓶的平头,切割片804由于压缩弹簧803的原因,切割片804向夹持部801内部移动,进而不会对安瓿瓶造成损伤;掰瓶机械手7带动掰瓶器8执行偏摆动作,实现将安瓿瓶的瓶头掰掉;掰瓶机械手7移动至垃圾桶11的上方,掰瓶器8打开,瓶头从夹持部801脱离,掉落至垃圾桶11内;掰瓶机械手7回到原位,且发送掰瓶完成信号给控制器9,控制器9发送信号给传送带1继续向前移动,瓶头被掰除后的安瓿瓶由工作人员从瓶座2中取出;当有未取出的安瓿瓶移动至光电传感器10的检测位置时,光电传感器10的光线被中断的瞬间,光电传感器10发送中断信号给控制器9,控制器9接收到光电传感器10的中断信号后,控制器9发送暂停工作的信号给传送带1和掰瓶机械手7,传送带1和掰瓶机械手7将停止工作;当安瓿瓶被取走后,光电传感器10光线恢复,光电传感器10发送复位信号给控制器9,控制器9发送继续工作的信号给传送带1和掰瓶机械手7,传送带1和掰瓶机械手7继续完成后续工作。
47.本实施的安瓿瓶自动开瓶装置工作时,可以检测掰瓶机械手7的掰瓶次数,从而得到被掰的安瓿瓶数量。
48.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1