一种爬管机器人用悬架减震装置的制作方法
本技术属于机器人,具体涉及一种爬管机器人用悬架减震装置。
背景技术:
1、目前,多采用管道作为工业运输载体,并且通常采用管道输送有毒有害气体。这些管道一旦发生破损,就会造成巨大的经济损失和人员伤害。为此,需要对这些管道线路进行损伤检测。
2、一般来说,多通过人工或爬管机器人对管道进行损伤检测。当管道位于高处管道或管道位置环境复杂时,通过人工检测管道的方式多存在工作周期长、检测效率低、费用高及危险性大等缺陷。
3、现有技术中,爬管机器人的主体模块在运动过程中其越障能力和运动稳定性存在较大局限性,不利于其安全平稳地越过管壁上的焊缝、凸起、凹陷等障碍缺陷,导致其在上述位置容易卡住。
技术实现思路
1、针对现有技术中爬管机器人在越障能力和运动稳定性上所存在的上述至少一个方面问题,本实用新型提供一种爬管机器人用悬架减震装置,使其能够利于机器人主体模块安全平稳地越过管壁上的焊缝、凸起、凹陷等障碍缺陷,避免在上述位置卡住,提高其越障能力和运动稳定性。
2、为实现上述目的,本实用新型采用如下技术方案:
3、本实用新型提供一种爬管机器人用悬架减震装置,包括:
4、固定架,
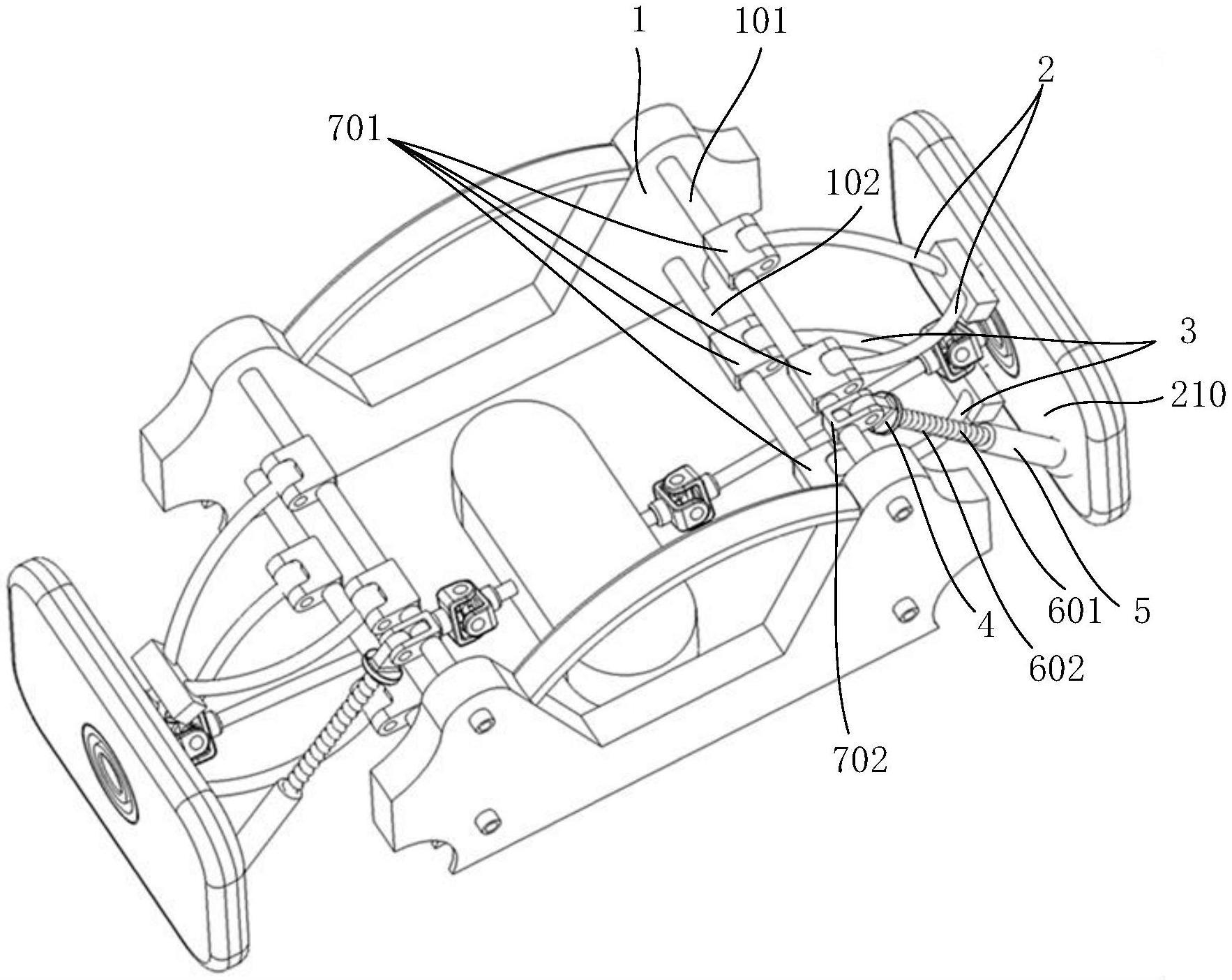
5、上悬架,其一端旋转安装在所述固定架上;
6、下悬架,其一端旋转安装在所述固定架上,并位于所述上悬架下方;
7、顶帽,其一端旋转安装在所述固定架上;
8、压紧件,其一端设置为中空管;
9、顶杆,其一端固定安装于所述顶帽的另一端,另一端套设在所述压紧件其一端的所述中空管内;
10、减震弹簧,其套设在所述顶杆外,其内径小于所述顶帽的外径和所述压紧件的外径,其外径大于所述中空管的内径;其两端分别接触所述顶帽和所述压紧件。
11、本实用新型的爬管机器人用悬架减震装置,可以具体的,爬管机器人设置有主体模块,所述主体模块设置有底盘,所述固定架与所述底盘相连接;所述爬管机器人设置有滚轮和静止板,所述滚轮设置有轴承,所述静止板上设置有轴孔,所述轴承旋转设置在所述轴孔内;所述上悬架、所述下悬架及所述压紧件的另一端均连接在所述静止板上。
12、作为优选,所述滚轮和所述静止板均成对布置,所述滚轮对称地安装在所述底盘的两侧,所述静止板分别设置在所述滚轮内侧;所述悬架减震装置成对布置,分别安装在所述底盘的两侧,且位于两侧的所述滚轮之间。
13、作为优选,所述底盘其两侧所安装的两个所述悬架减震装置的两个所述固定架相连接。
14、作为优选,固定架包括两侧的固定板、上固定杆和下固定杆,上固定杆和下固定杆的两端分别与两侧的固定板相连接,下固定杆位于上固定杆的下方;上悬架的一端旋转安装在上固定杆上,下悬架的一端旋转安装在下固定杆上。
15、作为优选,上固定杆和下固定杆上分别连接有第一固定件,上悬架和下悬架的一端分别通过销轴与第一固定件连接。
16、作为优选,顶帽的一端旋转安装在上固定杆上。
17、作为优选,上固定杆上连接有第二固定件,顶帽的一端分别通过销轴与第二固定件连接。
18、作为优选,上悬架和下悬架分别设置为至少两个,且其一端分别在上固定杆和下固定杆上均匀分布;上悬架和下悬架的另一端均设置为弧形杆,弧形杆分布在同一个球面上。
19、作为优选,压紧件的另一端设置有球体。
20、本实用新型的爬管机器人用悬架减震装置,能够达到以下有益效果:
21、本实用新型的爬管机器人用悬架减震装置,能够利于机器人的主体模块安全平稳地越过管壁上的焊缝、凸起、凹陷等障碍缺陷,使得主体模块安全平稳地越过这些缺陷障碍,而不被卡住,能够提高主体模块的越障能力和运动稳定性。
技术特征:
1.一种爬管机器人用悬架减震装置,其特征在于,包括:
2.如权利要求1所述的爬管机器人用悬架减震装置,其特征在于,爬管机器人设置有主体模块,所述主体模块设置有底盘,所述固定架与所述底盘相连接;所述爬管机器人设置有滚轮和静止板,所述滚轮设置有轴承,所述静止板上设置有轴孔,所述轴承旋转设置在所述轴孔内;所述上悬架、所述下悬架及所述压紧件的另一端均连接在所述静止板上。
3.如权利要求2所述的爬管机器人用悬架减震装置,其特征在于,所述滚轮和所述静止板均成对布置,所述滚轮对称地安装在所述底盘的两侧,所述静止板分别设置在所述滚轮内侧;所述悬架减震装置成对布置,分别安装在所述底盘的两侧,且位于两侧的所述滚轮之间。
4.如权利要求3所述的爬管机器人用悬架减震装置,其特征在于,所述底盘其两侧所安装的两个所述悬架减震装置的两个所述固定架相连接。
5.如权利要求1-4中任一项所述的爬管机器人用悬架减震装置,其特征在于,所述固定架包括两侧的固定板、上固定杆和下固定杆,所述上固定杆和所述下固定杆的两端分别与两侧的所述固定板相连接,所述下固定杆位于所述上固定杆的下方;所述上悬架的一端旋转安装在所述上固定杆上,所述下悬架的一端旋转安装在所述下固定杆上。
6.如权利要求5所述的爬管机器人用悬架减震装置,其特征在于,所述上固定杆和所述下固定杆上分别连接有第一固定件,所述上悬架和所述下悬架的一端分别通过销轴与所述第一固定件连接。
7.如权利要求5所述的爬管机器人用悬架减震装置,其特征在于,所述顶帽的一端旋转安装在所述上固定杆上。
8.如权利要求7所述的爬管机器人用悬架减震装置,其特征在于,所述上固定杆上连接有第二固定件,所述顶帽的一端分别通过销轴与所述第二固定件连接。
9.如权利要求5所述的爬管机器人用悬架减震装置,其特征在于,所述上悬架和所述下悬架分别设置为至少两个,且其一端分别在所述上固定杆和所述下固定杆上均匀分布;所述上悬架和所述下悬架的另一端均设置为弧形杆,所述弧形杆分布在同一个球面上。
10.如权利要求1-4中任一项所述的爬管机器人用悬架减震装置,其特征在于,所述压紧件的另一端设置有球体。
技术总结
本技术公开一种爬管机器人用悬架减震装置,包括固定架、上悬架、下悬架、顶帽、减震弹簧、顶杆和压紧件,上悬架的一端旋转安装在固定架上,下悬架的一端旋转安装在固定架上;顶帽的一端旋转安装在固定架上,顶杆的一端固定安装于顶帽的另一端;压紧件的一端为中空管,中空管套设在顶杆的另一端上;减震弹簧套设在顶杆外,其内径小于顶帽的外径及压紧件的外径,其外径大于中空管的内径;减震弹簧的两端分别与顶帽及中空管相接触;其能够利于机器人的主体模块安全平稳地越过管壁上的焊缝、凸起、凹陷等障碍缺陷,使得主体模块安全平稳地越过这些缺陷障碍,而不被卡住,能够提高主体模块的越障能力和运动稳定性。
技术研发人员:田旭海,王玉娟
受保护的技术使用者:天津市思维奇检测技术有限公司
技术研发日:20230316
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!