一种高精度上盖机的制作方法
本发明涉及液体灌装生产线结构领域。
背景技术:
1、在液体灌装,尤其是白酒灌装时需要考虑到卫生性以及高效性因素,通常需要在生产线中布置洗瓶、控瓶、灌装、卸盖、上盖、封盖等一系列加工设备,然而,传统的上盖设备通常对位精度不高,难以持续稳定的将瓶盖放在灌装之后的酒瓶瓶口处。
技术实现思路
1、本发明针对以上问题,提出了一种高精度上盖机,其操作方便、对位精度高。
2、本发明的技术方案为:
3、如图2-1、2-2、2-3所示,所述上盖机4包括机器人支撑架41、蜘蛛手机器人42以及吸盖抓具43,所述机器人支撑架41固定安装在机架上,并且处在瓶盖输送带和灌装轨道之间区域的上方,所述蜘蛛手机器人42的底座固定安装在机器人支撑架41上,所述吸盖抓具43则固定安装在蜘蛛手机器人42的执行端。
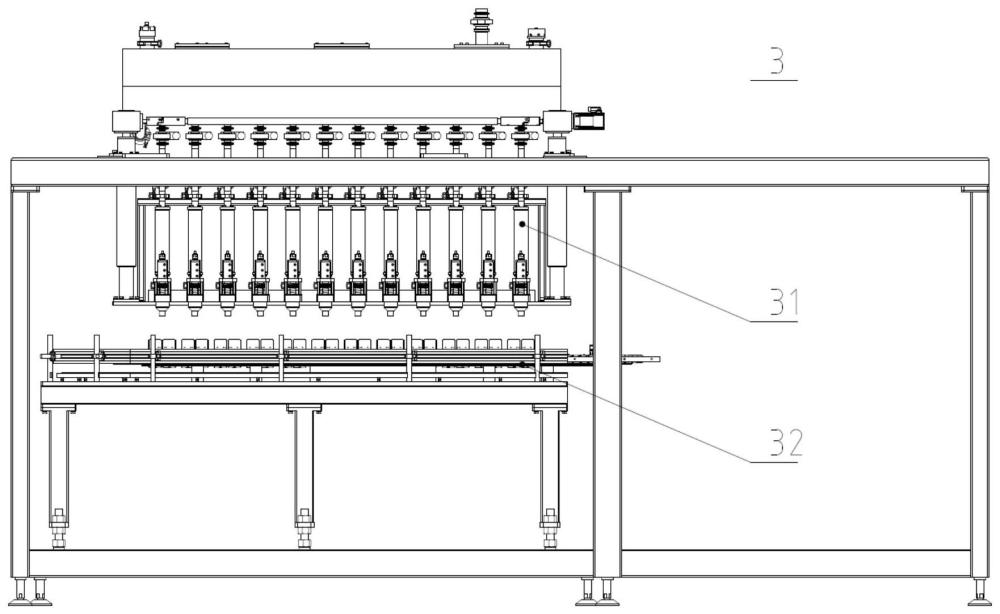
4、所述灌装轨道74上还设有磁悬浮输送机构32;
5、所述磁悬浮输送机构32包括环形的磁悬浮导轨321、固定安装在磁悬浮导轨321内侧的磁悬浮模组322以及若干插装在磁悬浮导轨321外边缘处的动力小车323;
6、所述磁悬浮导轨321固定安装在灌装轨道74内侧;在相邻动力小车323上分别固定安装相互垂直的两对磁悬浮输送夹指324;所述磁悬浮模组322包括与适配的轨道磁极,所述动力小车323的插口内壁上则固定安装有若干动力磁极。
7、所述灌装轨道74呈c字形,所述灌装轨道74的外侧还固定安装有同样呈c字形的护栏327。
8、本发明使用时,整层瓶盖清洗完成后放入上盖瓶盖定位托盘44上,由瓶盖输送带输送至上盖指定位置,蜘蛛手机器人42带动吸盖抓具43来到瓶盖定位托盘上方,蜘蛛手机器人2根据上盖瓶盖定位托盘上瓶盖坐标依次抓取瓶盖,放入磁悬浮运动单元夹持的瓶口上部,如此往复循环,直至整层瓶盖用完;然后蜘蛛手机器人42带动吸盖抓具43移动至另一条输送线上盖瓶盖定位托盘上方,继续抓盖上盖工作。
9、由于本发明中在瓶盖抓取位置采用了精度极高的蜘蛛手机器人,而在酒瓶输送位置采用了精度极高的磁悬浮输送机构,从而通过二者的结合,有效提升了上盖时的对位精度,保证了后续瓶盖的安装精度。
技术特征:
1.一种高精度上盖机,其特征在于,所述上盖机(4)包括机器人支撑架(41)、蜘蛛手机器人(42)以及吸盖抓具(43),所述机器人支撑架(41)固定安装在机架上,并且处在瓶盖输送带和灌装轨道(74)之间区域的上方,所述蜘蛛手机器人(42)的底座固定安装在机器人支撑架(41)上,所述吸盖抓具(43)则固定安装在蜘蛛手机器人(42)的执行端。
2.根据权利要求1所述的一种高精度上盖机,其特征在于,所述灌装轨道(74)上还设有磁悬浮输送机构(32);
3.根据权利要求1所述的一种全自动柔性灌装机,其特征在于,所述灌装轨道(74)呈c字形,所述灌装轨道(74)的外侧还固定安装有同样呈c字形的护栏(327)。
技术总结
本发明公开了一种高精度上盖机,涉及液体灌装生产线结构领域。其操作方便、对位精度高。所述上盖机包括机器人支撑架、蜘蛛手机器人以及吸盖抓具,所述机器人支撑架固定安装在机架上,并且处在瓶盖输送带和灌装轨道之间区域的上方,所述蜘蛛手机器人的底座固定安装在机器人支撑架上,所述吸盖抓具则固定安装在蜘蛛手机器人的执行端。由于本发明中在瓶盖抓取位置采用了精度极高的蜘蛛手机器人,而在酒瓶输送位置采用了精度极高的磁悬浮输送机构,从而通过二者的结合,有效提升了上盖时的对位精度,保证了后续瓶盖的安装精度。
技术研发人员:林俊伍,郝传鹏,赵丙坤,徐前景,刘建学,胡涛,徐超霞,赵红亮,刘鑫,张银国
受保护的技术使用者:泸州老窖股份有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!