一种多捷联惯导切换系统的制作方法
1.本实用新型涉及捷联惯导领域,特别涉及一种多捷联惯导切换系统。
背景技术:
2.捷联惯导(imu)是一种由多种传感仪组合,可实时定位的系统。因定位数据均来自其自身,所以捷联惯导(imu)相对卫星导航系统(gps)具有外界干扰小、定位数据刷新快等优点。
3.现有技术中,定位系统中通常采用一个imu。在该imu遇故障时,定位系统的定位功能就会出现定位不准确、定位功能失效等问题。因此,定位系统的稳定性较差。
技术实现要素:
4.本实用新型所要解决的技术问题是:提供一种多捷联惯导切换系统,提升定位系统的精确度以及稳定性。
5.为了解决上述技术问题,本实用新型采用的技术方案为:
6.一种多捷联惯导切换系统,包括主控模块、gps模块、供电模块以及两个以上的捷联惯导系统;
7.所述主控模块分别与每一个所述捷联惯导系统和所述gps模块相连,所述供电模块分别与所述主控模块、每一个所述捷联惯导系统和所述gps模块相连。
8.进一步地,所述捷联惯导系统为第一捷联惯导系统和第二捷联惯导系统,所述第一捷联惯导系统和第二捷联惯导系统均分别与所述主控模块和所述供电模块相连。
9.进一步地,所述捷联惯导系统采用的芯片型号为mpu6500。
10.进一步地,所述gps模块采用的定位模组为zed
‑
f9p。
11.进一步地,所述gps模块采用的定位模组为um332。
12.综上所述,本实用新型的有益效果在于:提供一种多捷联惯导切换系统,通过主控模块读取多个捷联惯导系统的数据,并于gps模块的数据做比较,选取精确度较高的捷联惯导系统作为当前定位系统的选用系统。多个捷联惯导系统的数据择优选取,提高了定位系统的精确度。并且,本实用新型在其中一个捷联惯导系统的发生故障时,可选用其余任一个捷联惯导系统,提高了定位系统的稳定性。
附图说明
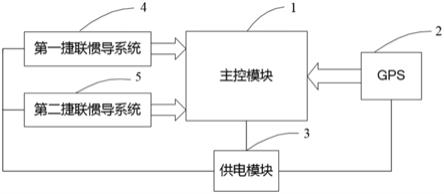
13.图1为本实用新型实施例的一种多捷联惯导切换系统的整体结构连接示意图;
14.标号说明:
15.1、主控模块;2、gps模块;3、供电模块;4、第一捷联惯导系统;5、第二捷联惯导系统。
具体实施方式
16.为详细说明本实用新型的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
17.请参照图1,一种多捷联惯导切换系统,包括主控模块1、gps模块2、供电模块3以及两个以上的捷联惯导系统;
18.所述主控模块1分别与每一个所述捷联惯导系统和所述gps模块2相连,所述供电模块3分别与所述主控模块1、每一个所述捷联惯导系统和所述gps模块2相连。
19.从上述描述可知,本实用新型的有益效果在于:提供一种多捷联惯导切换系统,通过主控模块1读取多个捷联惯导系统的数据,并于gps模块2的数据做比较,选取精确度较高的捷联惯导系统作为当前定位系统的选用系统。多个捷联惯导系统的数据择优选取,提高了定位系统的精确度。并且,本实用新型在其中一个捷联惯导系统的发生故障时,可选用其余任一个捷联惯导系统,提高了定位系统的稳定性。
20.进一步地,所述捷联惯导系统为第一捷联惯导系统4和第二捷联惯导系统5,所述第一捷联惯导系统4和第二捷联惯导系统5均分别与所述主控模块1和所述供电模块3相连。
21.从上述描述可知,捷联惯导系统的数量可以为两个。主控模块1根据第一和第二的不同精确度进行择优选用。
22.进一步地,所述捷联惯导系统采用的芯片型号为mpu6500。
23.从上述描述可知,所述捷联惯导系统中选用了陀螺仪加速度传感器mpu6500。
24.进一步地,所述gps模块2采用的定位模组为zed
‑
f9p。
25.从上述描述可知,所述gps模块2采用的定位模组为高精准度定位模组zed
‑
f9p。
26.进一步地,所述gps模块2采用的定位模组为um332。
27.从上述描述可知,gps模块2采用的定位模组也可以选用um332。
28.请参照图1,本实用新型的实施例一为:
29.一种多捷联惯导切换系统,通过在载体上安装多个捷联惯导系统,并进行择优使用,实现提升捷联惯导系统的精确度与稳定性。本实用新型适用于飞机、船舶和车辆等载体。
30.一种多捷联惯导切换系统,包括主控模块1、gps模块2、供电模块3以及两个以上的捷联惯导系统。其中,主控模块1分别与每一个捷联惯导系统和gps模块2相连,供电模块3分别与主控模块1、每一个捷联惯导系统和gps模块2相连。
31.如图1所示,在本实施例中,主控模块1同时采集多个捷联惯导系统的运行数据,进行精确度比较,则选择精确度较高的捷联惯导系统作为当前使用的系统。在其中任意一个或多个捷联惯导系统发生故障时,主控芯片都可以选用其他未发生故障的捷联惯导系统,从而保证了捷联惯导系统的精确度与稳定性。
32.请参照图1,本实用新型的实施例二为:
33.一种多捷联惯导切换系统,通过在载体上安装多个捷联惯导系统,并进行择优使用,实现提升捷联惯导系统的精确度与稳定性。本实用新型适用于飞机、船舶和车辆等载体。
34.一种多捷联惯导切换系统,在上述实施例一的基础上,如图1所示,捷联惯导系统为第一捷联惯导系统4和第二捷联惯导系统5,第一捷联惯导系统4和第二捷联惯导系统5均
分别与主控模块1和供电模块3相连。在实施例中,在实际应用中安装两个捷联惯导系统便可以实现提高捷联惯导系统的精确度与稳定性的效果。
35.综上所述,本实用新型提供了一种多捷联惯导切换系统,通过主控模块读取多个捷联惯导系统的数据,并于gps模块的数据做比较,选取精确度较高的捷联惯导系统作为当前定位系统的选用系统。多个捷联惯导系统的数据择优选取,提高了定位系统的精确度。并且,本实用新型在其中一个捷联惯导系统的发生故障时,可选用其余任一个捷联惯导系统,提高了定位系统的稳定性。
36.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本实用新型的专利保护范围。
技术特征:
1.一种多捷联惯导切换系统,其特征在于,包括主控模块、gps模块、供电模块以及两个以上的捷联惯导系统;所述主控模块分别与每一个所述捷联惯导系统和所述gps模块相连,所述供电模块分别与所述主控模块、每一个所述捷联惯导系统和所述gps模块相连。2.根据权利要求1所述的一种多捷联惯导切换系统,其特征在于,所述捷联惯导系统为第一捷联惯导系统和第二捷联惯导系统,所述第一捷联惯导系统和第二捷联惯导系统均分别与所述主控模块和所述供电模块相连。3.根据权利要求1所述的一种多捷联惯导切换系统,其特征在于,所述捷联惯导系统采用的芯片型号为mpu6500。4.根据权利要求1所述的一种多捷联惯导切换系统,其特征在于,所述gps模块采用的定位模组为zed
‑
f9p。5.根据权利要求1所述的一种多捷联惯导切换系统,其特征在于,所述gps模块采用的定位模组为um332。
技术总结
本实用新型公开了一种多捷联惯导切换系统,包括主控模块、GPS模块、供电模块以及两个以上的捷联惯导系统。其中,主控模块分别与每一个捷联惯导系统和GPS模块相连,供电模块分别与主控模块、每一个捷联惯导系统和GPS模块相连。本实用新型通过主控模块读取多个捷联惯导系统的数据,并于GPS模块的数据做比较,选取精确度较高的捷联惯导系统作为当前定位系统的选用系统。多个捷联惯导系统的数据择优选取,提高了定位系统的精确度。并且,本实用新型在其中一个捷联惯导系统的发生故障时,可选用其余任一个捷联惯导系统,提高了定位系统的稳定性。定性。定性。
技术研发人员:李晨亮
受保护的技术使用者:深圳市高巨创新科技开发有限公司
技术研发日:2020.10.27
技术公布日:2021/11/30
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1