一种基于LSTM预测的多机器人围捕系统
一种基于lstm预测的多机器人围捕系统
技术领域
1.本发明属于多机器人围捕领域,更具体地,涉及一种结合激光雷达、声呐、lstm预测的多机器人围捕系统。
背景技术:
2.随着技术的进步和对机器人需求的增长,单台机器人已经无法完成更复杂的任务。与单个机器人相比,多机器人系统可以实现数据的并行处理,系统中每一台单独的机器人均拥有传感器信息通信、计算分析、驱动控制的功能,可以同时协作完成多个不同的任务。当多机器人环境中的一台机器人出现故障时,其余正常运行的机器人能够对该故障进行补偿,从而继续完成任务。此外,多机器人系统还具有很强的适应性,可以将不同类型的机器人汇集到一个多机器人系统中来完成特定的任务。
3.在多机器人围捕环境搭建方面,当前多机器人围捕相关研究主要采用仿真平台验证围捕策略的有效性,但并未在真实环境中进行应用,缺少实用价值。使用开发板和相关传感器,搭建真实的多机器人环境,实现围捕功能的研究较少,且由于其实现方法通常不开源,导致围捕机器人的二次开发和功能扩展受到限制。在目标机器人的位姿数据分析方面,通常情况下是根据目标机器人的实时位置,采用一定的围捕策略协同完成围捕,但这是一种被动围捕跟踪,缺乏主动的先验拦截行为。
4.所以,针对存在以上问题的多机器人围捕环境中,利用ros作为开源框架搭建多机器人围捕环境和lstm预测目标机器人的下一时刻位置,提出一种基于lstm预测的多机器人围捕技术方案。
技术实现要素:
5.本发明在于为解决现有的多机器人围捕相关研究实用性低、扩张功能受限;围捕过程中缺乏先验信息、往往采取被动围捕、围捕效率低等情gpu服务器在计算机数据处理方面的高性能、低能耗计算的特点减少数据处理的时间,提高系统的实时性;利用激光雷达rplidar系列采集环境数据信息。利用ros分布式软件框架和lstm深度学习网络对目标机器人的位置进行训练和学习,设计了一种基于lstm预测的多机器人围捕系统。
6.本发明提出的一种基于lstm预测的多机器人围捕系统,使用深度学习服务器作为对目标机器人的位置信息预测,利用激光雷达进行一般的障碍物检测,实现机器人实时位姿定位;利用声呐可针对障碍物获取障碍物的距离信息;利用局域网通信,可实现多机器人之间的良好通讯。通过上述的配合及数据的处理,得以保证本系统实现了多机器人的预测围捕,提高了围捕效率。
7.为实现上述发明目的,本发明采用以下技术方案:
8.一种基于lstm预测的多机器人围捕系统,包括设备壳体,所述壳体内设有电源转换装置、cpu主控板、散热装置、通讯接口,激光雷达rplidar系列、声呐传感器;所述通讯装置用于机器人之间的通信和数据的发送等。
9.cpu的三个主控板采用gtx1650(i5
‑
10300)笔记本电脑,与相应的传感器相连接,实时获得环境的信息及目标机器人的位置信息;gpu服务器采用y7000(i5
‑
9300)笔记本,采用rtx1650ti显卡。
10.本发明利用无线局域网传输性能高、覆盖率广等特点,实现目标机器人数据处理端与围捕机器人接收数据的实时通讯,同时gpu服务器能够高效的运行深度学习、计算机处理数据的算法,使得系统实时性和准确性大大提高,开发出了可扩展的、围捕效率较高的多机器人围捕系统。
11.各部件的作用过程如下:单台机器人控制系统可以通过ros平台为外接主控笔记本电脑提供激光雷达数据和机器人相关数据如位姿、里程计、运动速度等。外接主控可以运行上层智能控制,控制下层机器人的行为,实现同步定位与建图、路径规划导航等功能。为实现多机器人围捕操作,本发明需构建三个机器人的控制系统,同时将所有的控制和计算功能聚集在一个深度学习服务器上,以降低机器人的功耗,提高计算能力。深度学习服务接口采用订阅、发布的通信方式,接收目标机器人的实时位置,并做算法处理,预测其下一时刻位置,根据预测值发布围捕点,通过路径规划算法完成围捕行为,并将位置信息转化为雷达信息。
12.与现有技术相比,本发明具有以下特点:
13.本发明提供的一种基于lstm预测的多机器人围捕系统在笔记本硬件平台上搭建多机器人围捕系统,采用lstm神经网络模型对目标机器人下一时刻的位置进行预测,根据预测值设置围捕点,同时利用gpu服务器在计算机数据处理和深度学习方面的运算高性能特点,可减少数据的处理时间,实时性得到了大大的提高;利用ros平台和先锋机器人平台,使得该系统的扩展性增强;利用激光雷达获取的环境信息、声纳获取的位置信息,实现了拦截式围捕,提高了围捕效率。
附图说明
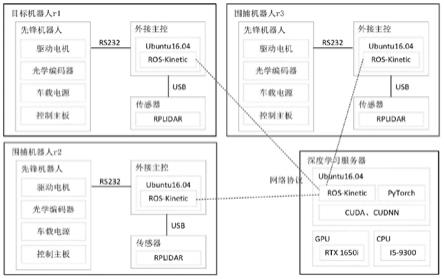
14.图1为分布式多机器人环境的架构图
15.图2为多机器人环境下运用move_base实现围捕操作的流程图
16.图3为预测围捕实验流程图
具体实施方式
17.基于lstm预测的多机器人围捕系统,系统3个主控(1)采用gtx1650(i5
‑
10300)笔记本电脑作为主控cpu,并融合多种数据。数据采集传感器(2)为激光雷达rplidar系列,且数据接口为usb2.0接口。gpu服务器(3)用于处理系统接收到的数据信息,并将目标机器人下一时刻的位置预测结果返回给(1)做路径规划。声纳(4)用于采集周围的距离信息,并将信息返回给(1)做数据融合。路由器(5)如果在小型户外场景采用单节点路由器,如果在大型复杂场景,可多路由器组网,覆盖整个系统区域。基于ros平台搭建多机器人预测围捕的环境(6),该平台开源并且可以在不同的机器人平台上实现代码的复用,减少重复的劳动,扩展性增强。多机器人预测围捕的仿真与实现(7)在gazebo仿真平台和先锋机器人真实平台进行预测围捕实验。
技术特征:
1.一种基于lstm预测的多机器人围捕系统,其特征在于。包括系统的三个主控cpu(1),(1)控制(2)用于采集雷达信息的激光雷达rplidar系列,用于处理整个系统接收到的数据信息并通过深度学习预测位置的gpu服务器(3),并将位置预测信息传给(1)中的围捕机器人,用于采集周围的距离信息的声纳(4),并将信息返回给(1),(1)中的围捕机器人接收到预测算法后得到目标机器人的位置信息并分配围捕点,用于(1)和其他系统传输和交换目标机器人位置数据及其他控制信息的无线路由器(5),用于多机器人预测围捕的环境(6),用于多机器人预测围捕的仿真与实现(7)。2.根据权利要求1所述的基于lstm预测的多机器人围捕系统,其特征在于,所述系统的三个主控(1)采用gtx1650(i5
‑
10300)笔记本作为主控cpu。3.根据权利要求1所述的基于lstm预测的多机器人围捕系统,其特征在于,所述数据采集传感器(2)为激光雷达rplidar系列,且数据接口为usb2.0接口。4.根据权利要求1所述的基于lstm预测的多机器人围捕系统,其特征在于,所述gpu服务器(3)用于处理系统采集的数据信息,并将位置预测信息结果返回给(1)做围捕操作。5.根据权利要求1所述的基于lstm预测的多机器人围捕系统,声纳(4)用于采集周围的距离信息,并将信息返回给(1)做数据融合。6.根据权利要求1所述的基于lstm预测的多机器人围捕系统,其特征在于,所述路由器(5),如果在小型户外场景采用单节点路由器,如果在大型复杂场景,可多路由器组网,覆盖整个系统区域。7.根据权利要求1所述的基于lstm预测的多机器人围捕系统,其特征在于,所述预测围捕环境(6)为开源的ros框架并支持多种编程语言,本发明中,预测与任务分配采用python开发,其余模块采用c++开发。8.根据权利要求1所述的基于lstm预测的多机器人围捕系统,其特征在于,所述预测围捕仿真与实现(7)为gazebo仿真平台和先锋机器人的真实平台。
技术总结
本发明设计一种基于LSTM预测的多机器人围捕系统(0),所述系统包括负责采集数据信息的激光雷达Rplidar系列、以及用于预测的深度学习服务器,其中本系统包括一个目标机器人,两个围捕机器人。本发明提供的系统采用局域网通信,本系统通过LSTM预测所得到的目标机器人下一时刻的位置信息,根据预测值设置围捕点,可优化围捕线路,从而提高围捕效率、实现拦截式围捕。式围捕。式围捕。
技术研发人员:鲜晓东 田丽蓉 郭婕 赵德悦
受保护的技术使用者:重庆大学
技术研发日:2021.06.07
技术公布日:2021/9/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1