一种激光雷达探测成像方法及装置
1.本发明涉及激光雷达领域,尤其是涉及一种激光雷达探测成像方法及装置
背景技术:
2.激光雷达是对目标进行距离探测的装置,。当激光器发射激光脉冲后,经过一定的飞行时间,激光抵达目标,被目标发射后的激光被探测器接收,通过记录激光发射和接收的时间间隔可以直接探测出目标点的距离,通过二维探测器或者扫描的一维探测器可以获得目标的三维成像。探测器在工作时会接收到环境的背景光干扰,将背景光或者目标反射的光子转换为电信号后,还会叠加有探测器自身的噪声。无论是背景光还是探测器自身的噪声,都会让激光雷达的三维成像质量大幅度下降,从而严重限制激光雷达的应用场景。
3.选择特定的时间门控可提高雷达的有效探测时间比,从而尽可能规避背景噪声干扰,是一种有效提高信噪比的方法。假设光子从发射到返回的时间为to,to反应了该目标点到激光雷达的距离,由于目标一般为三维立体,返回的数据通常由一群点即点云组成,目标点云的距离范围假设为to到(to+δto),其中δto反应了目标在距离维度上的深度。激光雷达的探测时间长度为td,需要满足td》(to+δto),在整个探测时间td内,核心目标的有效探测时间窗口为δto,除了目标距离以外的时间,激光雷达接收到的主要是背景光干扰,这些背景光严重限制了激光雷达的信噪比(或者信号背景比),尤其是对于盖革雪崩型光电探测器,背景干扰会把信号光子湮没。如果能将激光雷达的探测时间窗口大幅度压缩为tw到tw+δtw,使探测的时间门控窗口(tw,tw+δtw)略大于目标返回的时间窗口(to,to+δto),那么背景干扰和探测器的噪声将缩减δtw/td。
4.现有的时间门控有两种方案,一种是将整个探测时间等间隔分割为n段,每一帧的探测以td/n为步进,将探测的起始时刻从0,td/n,2td/n,顺序步进到i
×
td/n,最后步进到td。每一帧获取的数据均进行图像质量的分析,当认为成像质量达到预定要求时,即认为探测的起始时刻已临近目标,此时停止起始时刻的步进,这种方案的缺点是需要平均n/2帧才能实现时间门控。另外一种方案是先从td/2时刻作为起始时刻,判断获取的数据中是否存在目标,如存在目标,那么将门控的起始时刻调整到3td/4,如不存在目标,那么将门控的起始时刻调整到td/4,然后继续细化门控的起始时刻,直到目标的图像质量达到预定要求。这种方案通过log2n次即可完成门控的准确锁定,但是这种方案存在缺点即当未检测到目标时,既可能是错过了目标的探测时间窗口,也可能是目标距离仍较远,当判断错误时,可能就完全无法检测出目标。
技术实现要素:
5.本发明的目的就是为了提供一种激光雷达探测成像方法及装置。
6.本发明的目的可以通过以下技术方案来实现:
7.一种激光雷达探测成像方法,包括:
8.发射激光脉冲后,探测器接收所述激光脉冲通过待测物体反射后的光信号,并绘
制待测物体的点云;
9.通过神经网络模型基于绘制得到的待测物体的点云,得到时间间隔t;
10.再次发射激光脉冲,控制所述探测器在前一次测量得到的时间间隔区间内接收反射后的光信号,并绘制新的点云,经所述神经网络模型处理并计算得到本次的时间间隔;
11.比较最近两次得到的时间间隔,当差值小于设定阈值时,则根据该两次时间间隔确定时间门控;
12.根据所述时间门控进行探测成像。
13.所述光信号通过预处理电路进行数模转换等处理后进入神经网络模型。
14.所述神经网络模型将绘制的点云映射到三维坐标系中。
15.所述时间间隔由所述待测物体三维坐标中表征距离维度的坐标最大值和最小值确定。
16.所述时间门控的确定值为后一次测得的时间间隔的值。
17.一种激光雷达探测成像装置,包括激光器、探测器、控制电路、神经网络处理器、存储器,以及程序,所述处理器执行所述程序时实现上述方法。
18.与现有技术相比,本发明具有以下有益效果:
19.本发明区分于传统的时间门控的固定确定方法,可在未知场景下,结合实际探测情况,通过多次“探测-识别-迭代”循环迭代的手段得到了范围更精确的时间门控,从而在极短时间内实现高质量时间门控,减少了探测中噪声的影响,提高了雷达激光成像的准确性以及探测的效率;
附图说明
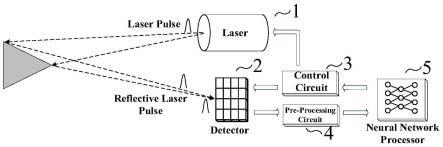
20.图1为本发明的装置结构示意图;
21.图2为本发明某实施例的三维图像处理示意图;
22.其中:a1为无干扰/噪声的目标3d视图,a2为无干扰/噪声的目标平面视图,a3为全探测时间干扰/噪声的目标3d视图,a4为全探测时间干扰/噪声的目标平面视图,a5为门控区间干扰/噪声的目标3d视图。
具体实施方式
23.下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
24.本实施例提出了一种激光雷达探测成像方法及装置,参考图1及图2,该激光雷达探测成像装置包括1-激光器,2-光电探测器,3-控制电路,4-预处理电路,5-神经网络处理器激光器,激光器发射激光脉冲后,经待测目标(兔子)反射后光学探测器阵列在全探测时间t1内接收激光脉冲反射后的光信号,由于待测物体与背景光线在光学上存在明显差异,因此经过预处理电路处理后可绘制出待测物体的点云;
25.通过神经网络处理器基于绘制得到的待测物体的点云,将待测物体的立体视图映射于三维坐标系内,可见图2(a4),其中三维坐标系中的z坐标反映了待测物体与激光器的直线距离,根据待测物体z坐标数值最大值和最小值,再除以光速,可计算得到激光器发出
的激光脉冲到达待测物体远近两端的时间间隔t;
26.继而再次发射激光脉冲,控制电路控制光电探测器阵列在前一次测量计算得到的时间间隔区间内接收反射的光信号,并绘制新的点云,经神经网络处理器处理得到新的三维坐标目标视图,并计算得到本次的时间间隔t2;
27.比较最近两次得到的时间间隔,判断差值是否小于设定阈值,本实施例设定的阈值为时间间隔的10%,若前一次是10s-11s的时间间隔,则后一次小于设定阈值的时间间隔值应为(9.9s~10.1s)-(10.9s~11.1s),在差值小于设定阈值的情况下,将后一次测量的时间间隔设为所确定的时间门控;
28.最后,根据所得到的时间门控,在该时间门控间隔内对进行物体的探测成像,结果可见图2(a6)。
技术特征:
1.一种激光雷达探测成像方法,其特征在于,包括:发射激光脉冲后,探测器接收所述激光脉冲通过待测物体反射后的光信号,并绘制待测物体的点云;通过神经网络模型基于绘制得到的待测物体的点云,得到时间间隔t;再次发射激光脉冲,控制所述探测器在前一次测量得到的时间间隔区间内接收反射后的光信号,并绘制新的点云,经所述神经网络模型处理并计算得到本次的时间间隔;比较最近两次得到的时间间隔,当差值小于设定阈值时,则根据该两次时间间隔确定时间门控;根据所述时间门控进行探测成像。2.根据权利要求1所述一种激光雷达探测成像方法,其特征在于,所述光信号通过预处理电路进行数模转换等处理后进入神经网络模型。3.根据权利要求1所述一种激光雷达探测成像方法,其特征在于,所述神经网络模型将绘制的点云映射到三维坐标系中。4.根据权利要求1所述一种激光雷达探测成像方法,其特征在于,所述时间间隔由所述待测物体三维坐标中表征距离维度的坐标最大值和最小值确定。5.根据权利要求1所述一种激光雷达探测成像方法,其特征在于,所述时间门控的确定值为后一次测得的时间间隔的值。6.一种激光雷达探测成像装置,包括激光器、探测器、控制电路、神经网络处理器、存储器,以及程序,其特征在于,所述处理器执行所述程序时实现以下步骤:发射激光脉冲后,探测器接收所述激光脉冲通过待测物体反射后的光信号,并绘制待测物体的点云;通过神经网络模型基于绘制得到的待测物体的点云,得到时间间隔t;再次发射激光脉冲,控制所述探测器在前一次测量得到的时间间隔区间内接收反射后的光信号,并绘制新的点云,经所述神经网络模型处理并计算得到本次的时间间隔;比较最近两次得到的时间间隔,当差值小于设定阈值时,则根据该两次时间间隔确定时间门控;根据所述时间门控进行探测成像。7.根据权利要求6所述一种激光雷达探测成像装置,其特征在于,所述光信号通过预处理电路进行数模转换等处理后进入神经网络模型。8.根据权利要求6所述一种激光雷达探测成像装置,其特征在于,所述神经网络模型将绘制的点云映射到三维坐标系中。9.根据权利要求6所述一种激光雷达探测成像装置,其特征在于,所述时间间隔由所述待测物体三维坐标中表征距离维度的坐标最大值和最小值确定。10.根据权利要求6所述一种激光雷达探测成像装置,其特征在于,所述时间门控的确定值为后一次测得的时间间隔的值。
技术总结
本发明涉及一种激光雷达探测成像方法及装置。方法包括发射激光脉冲,预处理返回的信号并计算近似距离和时间,持续测量缩小目标的范围,然后依此不断迭代,直至某两次测得的时间间隔近似相同时完成时间门控的锁定,开始目标探测。与现有技术相比,本发明具有可在极短时间内提供了高质量的时间门控从而使雷达探测准确性更高等优点。测准确性更高等优点。测准确性更高等优点。
技术研发人员:黄张成 陈迟晓 刘琦
受保护的技术使用者:复旦大学
技术研发日:2021.07.13
技术公布日:2023/1/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1