一种巡视器移动时机构颠簸振动条件的确定方法与流程
1.本发明属深空探测领域,具体涉及一种巡视器移动时机构颠簸振动条件的确定方法。
背景技术:
2.巡视器在星球表面(月球和火星)移动时,由于星球表面地形和土壤环境的复杂,使得巡视器上的机构处于振动状态,产生颠簸现象。颠簸现象的产生来自于两方面:一方面是星球表面分布着的撞击坑、石块等非结构化的地形地貌;另一方面是巡视器的移动装置特性。两者的共同作用,使星球表面的地形不平经车轮、悬架传递给车体,尽而传递到安装在车体上的机构。
3.星球表面的地形地貌可以分为斜坡、撞击坑、岩石等特征;对于具体的探测任务而言,一般关注着陆区的地形地貌特征,可以通过遥感等手段获得着陆区域高分辨率的地形数据;对于缺乏着陆区地形地貌数据的情况,可以采用相近区域的地形特征进行近似。
4.1)月球和火星表面地形特征:
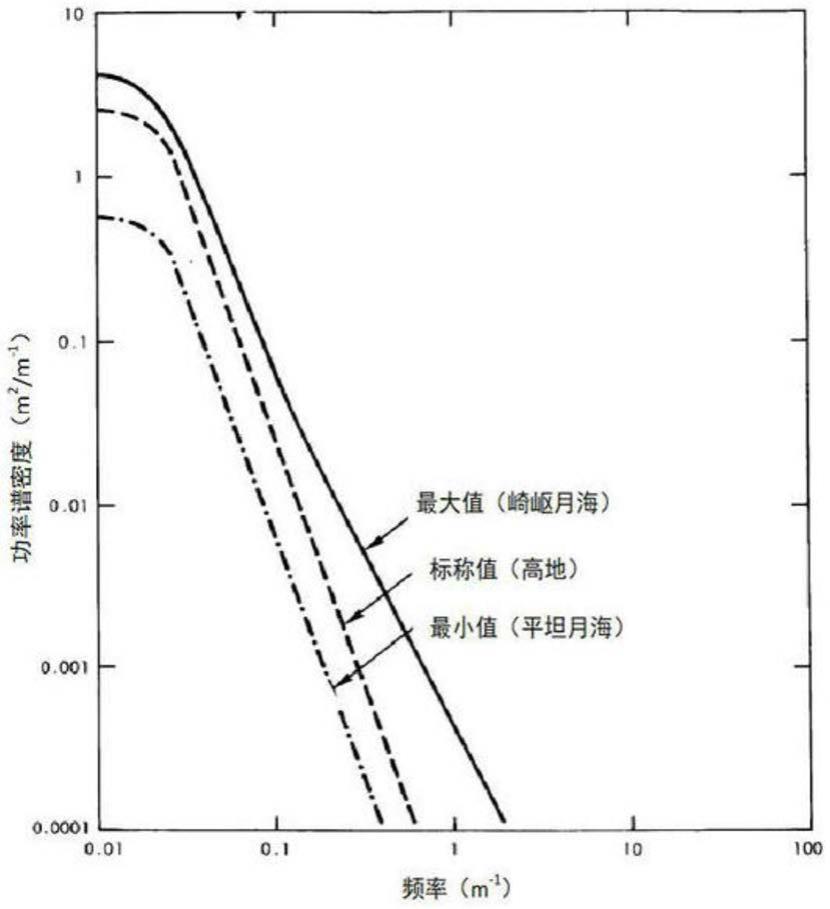
5.月面地形分为月海区域和高地区域;月海又分为平坦月海和崎岖月海;月面地形的典型特征分为撞击坑、斜坡和岩石。撞击坑的分布采用撞击坑直径与大于该直径的撞击坑数目进行描述;斜坡分为平坦月海、崎岖月海和高地等区域进行描述,获得斜坡基线与平均坡度之间的数值关系曲线。岩石也按照分布区域的不同获得相应的岩石直径与大于该直径的岩石数目曲线;这些均是在一定范围内获得图形数据处理得到的,可作为开展着陆区研究的初步依据;随着月球轨道探测技术的发展,获得了月面高精度的地形图,可以据此开展着陆区的地形分析;传统的基于功率谱的地形统计分布不再使用,而直接使用高精度的月面地形数据。
6.以月面不平度为例,典型的月面不平度统计特性如图1所示,从图1中可以看出,月面的不平度可以分为平坦月海(smooth mare)、崎岖月海(rough mare)和高地(roughupland/hummocky upland)等三种区域;图1中还给出来地球上两种地形(grass runway和bonita lavaflow,ariz)的不平度。
7.与月面地形相比较,火星表面的石块分布较多;火星表面的石块分布通常采用石块所占面积的数目为例;例如,nasa对pathfinder巡视器周围石块的统计分布,周围平均石块分布为18.7%,最小为6.7%,最大为44.9%。
8.月球和火星表面的地形特征是开展巡视器移动时颠簸振动的输入条件,所以需要根据撞击坑、石块、斜坡等典型特征建立表面数字高程模型。
9.2)巡视器的移动性能:
10.巡视器在星球表面移动时,需要具有一定的移动能力,实现巡视探测任务;移动能力通常包括移动速度、越障高度、机动能力和爬坡能力等;由于巡视器资源的约束,通常对于移动能力的项目都是采用相互独立的方式加以要求,避免叠加要求造成资源的浪费;例如,越障高度指标通常是指在水平地面上的越障高度,对于在斜坡上的越障能力不加以特
殊要求;以我国嫦娥三号/四号巡视器为例,移动装置采用被动式主副摇臂+6个独立驱动的车轮形式。
11.移动速度为200m/h,越障高度200mm,机动能力具有原地转向和行进间转向能力(转向半径不大于1.5m);爬坡能力不低于20
°
;巡视器在星球表面进行转向和爬坡时,由于是表面平坦所以不会引起器上机构的晃动;只有在越障过程中,存在车轮的遇到障碍物、滚上障碍物、离开障碍物等过程,造成车轮轮轴高度的变化,进而产生车体高度的变化;障碍物的形状以台阶为例,越障过程图2至图4所示。
技术实现要素:
12.本发明的目的是提供一种巡视器移动时机构颠簸振动条件的确定方法。
13.一种巡视器移动时机构颠簸振动条件的确定方法,该方法的步骤如下:
14.1)振动幅值基于巡视器的越障能力;根据巡视器的越障高度指标,结合巡视器车轮布局特点以及星球表面重力加速度,确定车轮越障时的高度为颠簸振动的最大振幅,从而确定颠簸振动条件的幅值;
15.2)基频特性基于巡视器车轮的接触长度和移动速度;巡视器车轮的接触长度依据巡视器在星球表面的重量、星壤的承压特性、车轮的宽度和直径d以及星球表面地形因素综合确定。
16.3)根据巡视器的星球表面不平度参数和巡视器的移动速度,确定颠簸振动的基频条件。
17.本发明的有益效果是:
18.采用本发明之确定方法,可以依据巡视器的越障高度指标,结合巡视器车轮布局特点以及星球表面重力加速度,确定巡视器颠簸振动时的最大振幅;根据巡视器车轮的接触长度和移动速度,确定颠簸振动时的基频;根据这两个条件,可以确定巡视器机构研制过程中的颠簸试验条件,为检验机构是否满足巡视器星球表面移动创造试验条件。
附图说明
19.图1是月面不平度统计特性曲线图;
20.图2是巡视器越障过程的巡视器在水平地面行进示意图;
21.图3是巡视器越障过程的巡视器前轮越上台阶示意图;
22.图4是巡视器越障过程的巡视器前轮和中轮越上台阶示意图。
具体实施方式
23.一种巡视器移动时机构颠簸振动条件的确定方法,该方法的步骤如下:
24.1)根据巡视器的着陆区范围结合星球表面地形的统计特性确定不平度参数;
25.2)根据巡视器的越障指标结合巡视器所需行驶的目标星球的表面重力加速度,确定颠簸振动的振幅条件。
26.巡视器的越障高度为h,星球表面的重力加速度为g
p
,车轮总数目为2n。巡视器颠簸发生在巡视器越过障碍物时,最大颠簸发生在同侧两个车轮越过障碍物时。例如,巡视器具有6个车轮,单侧为3个车轮,采用主副摇臂悬架。前轮与中轮、中轮与后轮之间的距离相
等。那么巡视器的最大颠簸幅度发生在两前轮或两后轮越过障碍物时;巡视器车体的最大颠簸振幅计算公式为:
[0027][0028]
地面试验时,等效的颠簸振动幅度为下式:
[0029][0030]
例如对于火星巡视器而言,火星表面的重力加速度为越障高度为300mm,那么等效的颠簸振动幅度为a=75mm。
[0031]
3)根据巡视器的星球表面不平度参数和巡视器的移动速度,确定颠簸振动的基频条件。
[0032]
巡视器车轮的接触长度依据巡视器在星球表面的重量、星壤的承压特性、车轮的宽度和直径d以及星球表面地形等因素综合确定。巡视器车轮的轮壤接触长度l可按照车轮半径的2/3进行预估。移动速度v为巡视器在星球表面水平地形上的最大速度。
[0033][0034]
式中,λ为火星表面地形的波长,根据星球表面地面不平度取接近接触长度的1/4的数值。
[0035]
例如以火星巡视器为例,火星车车轮的半径为150mm,在火星表面水平地形上的最大速度为v=200m/h=0.05m/s。轮壤接触长度约为0.1m,那么f=2hz。
技术特征:
1.一种巡视器移动时机构颠簸振动条件的确定方法,其特征在于:该方法的步骤如下:1)振动幅值基于巡视器的越障能力;根据巡视器的越障高度指标,结合巡视器车轮布局特点以及星球表面重力加速度,确定车轮越障时的高度为颠簸振动的最大振幅,从而确定颠簸振动条件的幅值;2)基频特性基于巡视器车轮的接触长度和移动速度;巡视器车轮的接触长度依据巡视器在星球表面的重量、星壤的承压特性、车轮的宽度和直径d以及星球表面地形因素综合确定;3)根据巡视器的星球表面不平度参数和巡视器的移动速度,确定颠簸振动的基频条件。2.根据权利要求1所述的一种巡视器移动时机构颠簸振动条件的确定方法,其特征在于:所述的巡视器的越障高度为h,星球表面的重力加速度为g
p
,车轮总数目为2n;巡视器颠簸发生在巡视器越过障碍物时,最大颠簸发生在同侧两个车轮越过障碍物时,当巡视器具有6个车轮,单侧为3个车轮,采用主副摇臂悬架;前轮与中轮、中轮与后轮之间的距离相等,那么巡视器的最大颠簸幅度发生在两前轮或两后轮越过障碍物时,巡视器车体的最大颠簸振幅计算公式为:地面试验时,等效的颠簸振动幅度为下式:3.根据权利要求1所述的一种巡视器移动时机构颠簸振动条件的确定方法,其特征在于:所述巡视器车轮的轮壤接触长度l按照车轮半径的2/3进行预估;移动速度v为巡视器在星球表面水平地形上的最大速度;式中,λ为火星表面地形的波长,为星球表面地面不平度取接近接触长度的1/4的数值。
技术总结
本发明公开了一种巡视器移动时机构颠簸振动条件的确定方法,该方法是:根据巡视器的着陆区范围结合星球表面地形的统计特性确定不平度参数;依据巡视器的越障高度指标,结合巡视器车轮布局特点以及星球表面重力加速度,确定巡视器颠簸振动时的最大振幅;根据巡视器车轮的接触长度或地面不平度和移动速度,确定颠簸振动时的基频。本发明可以确定巡视器在移动过程中的颠簸环境,为开展机构研制试验提供试验条件。试验条件。
技术研发人员:党兆龙 陈百超 彭松 潘冬 邹猛
受保护的技术使用者:北京空间飞行器总体设计部
技术研发日:2021.08.13
技术公布日:2021/11/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1