一种机器人定位处理方法、装置及机器人与流程
【】本发明涉及人工智能领域,具体而言,涉及一种机器人定位处理方法、装置及机器人。
背景技术
0、
背景技术:
1、近些年,随着计算机硬件设施的升级,其计算处理能力不断增强,而且摄像头分辨率逐渐提高,机器人利用视觉信息来实现自定位,具有实时性好、易实施和成本低等优点。目前,基于视觉实现自定位的方案有:利用rfid标签自定位和导航、采用条形编码格式实现机器人的定位等,但是相关技术中机器人的定位精度较低。
2、针对相关技术中机器人定位精度较低的问题,尚未提出有效的解决方案。
3、因此,有必要对现有技术予以改良以克服现有技术中的所述缺陷。
技术实现思路
0、
技术实现要素:
1、本发明的目的在于提供一种机器人定位处理方法、装置及机器人,以至少解决相关技术中机器人定位精度较低的问题。
2、根据本申请的一个可选实施例,提供了一种机器人定位处理方法,包括:
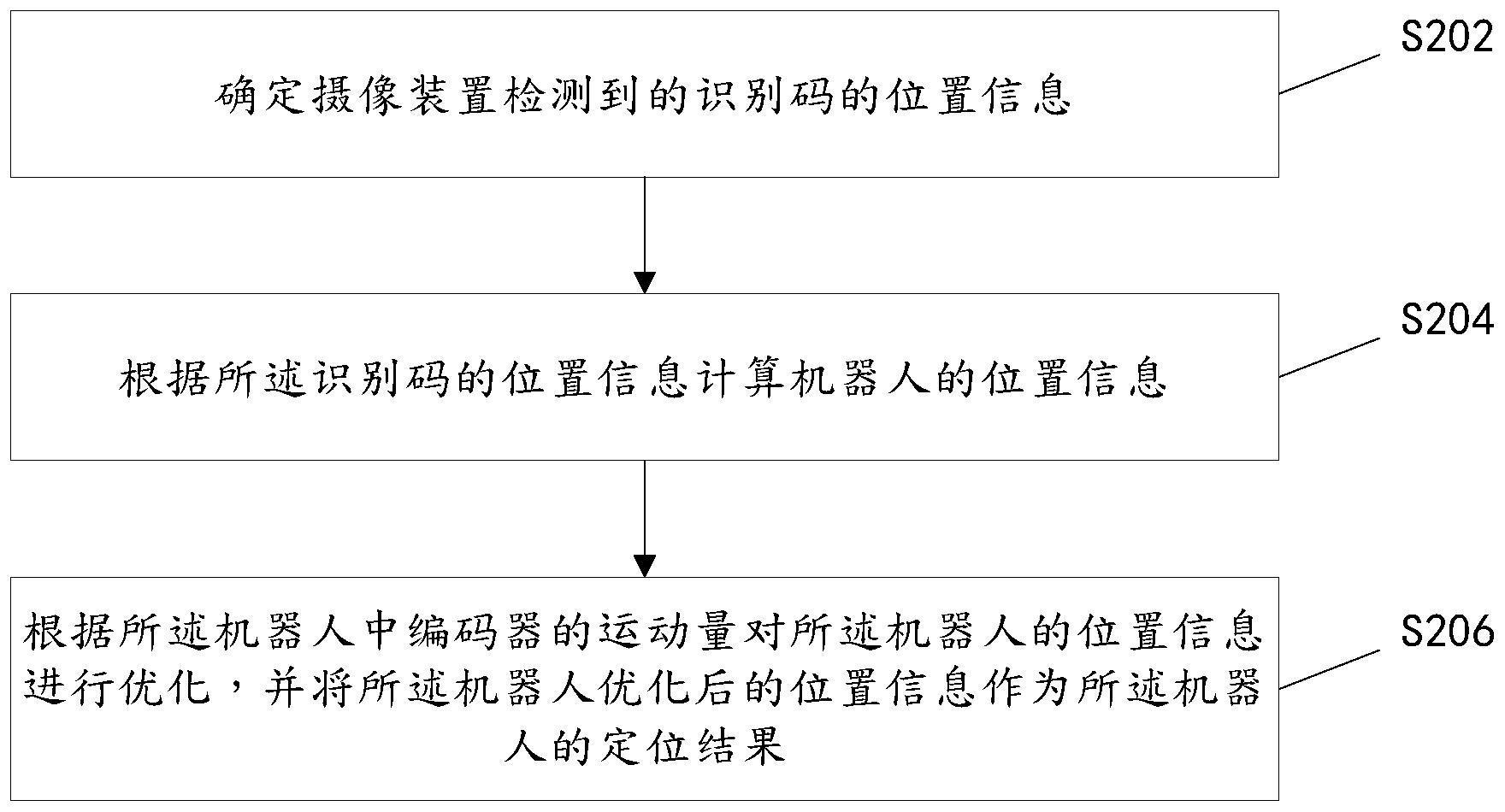
3、确定摄像装置检测到的识别码的位置信息;
4、根据所述识别码的位置信息计算机器人的位置信息;
5、根据所述机器人中里程计记录的运动量对所述机器人的位置信息进行优化,并将所述机器人优化后的位置信息作为所述机器人的定位结果。
6、可选地,确定摄像装置检测到的识别码的位置信息包括:
7、通过摄像机检测并识别所述识别码的标识信息;
8、根据预先建立的地图中识别码与坐标的对应关系确定所述识别码的位置信息。
9、可选地,根据所述识别码的位置信息计算机器人的位置信息包括:
10、获取所述摄像机与所述识别码的相对位置;
11、根据所述识别码的位置信息与所述相对位置计算所述机器人的位置信息。
12、可选地,根据所述机器人中里程计记录的运动量对所述机器人的位置信息进行优化包括:
13、利用扩展卡尔曼滤波器ekf算法对所述运动量与所述机器人的位置信息进行融合,得到所述机器人优化后的位置信息。
14、可选地,利用扩展卡尔曼滤波器ekf算法对所述运动量与所述机器人的位置信息进行融合,得到所述机器人优化后的位置信息包括:
15、获取所述机器人在上一时刻优化后的位置信息;
16、根据所述上一时刻优化后的位置信息与当前时刻的所述运动量确定所述当前时刻所述机器人的预估位置信息;
17、根据所述预估位置信息更新所述机器人的位置信息,得到所述当前时刻所述机器人优化后的位置信息。
18、可选地,所述运动矢量包括旋转角度与速度。
19、根据本申请的另一个实施例,还提供了一种机器人定位处理装置,包括:
20、第一确定模块,用于确定摄像装置检测到的识别码的位置信息;
21、第二确定模块,用于根据所述识别码的位置信息计算机器人的位置信息;
22、优化模块,用于根据所述机器人中里程计记录的运动量对所述机器人的位置信息进行优化,并将所述机器人优化后的位置信息作为所述机器人的定位结果。
23、可选地,所述第一确定模块包括:
24、识别子模块,用于通过摄像机检测并识别所述识别码的标识信息;
25、第一确定子模块,用于根据预先建立的地图中识别码与坐标的对应关系确定所述识别码的位置信息。
26、可选地,所述第二确定模块包括:
27、获取子模块,用于获取所述摄像机与所述识别码的相对位置;
28、第二确定子模块,用于根据所述识别码的位置信息与所述相对位置确定所述机器人的位置信息。
29、可选地,所述优化模块包括:
30、融合子模块,用于利用扩展卡尔曼滤波器ekf算法对所述运动量与所述机器人的位置信息进行融合,得到所述机器人优化后的位置信息。
31、可选地,所述融合子模块包括:
32、获取单元,用于获取所述机器人在上一时刻优化后的位置信息;
33、确定单元,用于根据所述上一时刻优化后的位置信息与当前时刻的所述运动量确定所述当前时刻所述机器人的预估位置信息;
34、更新单元,用于根据所述预估位置信息更新所述机器人的位置信息,得到所述当前时刻所述机器人优化后的位置信息。
35、可选地,所述运动矢量包括旋转角度与速度。
36、根据本申请的另一个实施例,还提供了一种机器人,包括:
37、摄像装置,用于将检测到的识别码发送至控制装置;
38、里程计,用于记录所述机器人的运动量;
39、控制装置,用于确定所述识别码的位置信息,根据所述识别码的位置信息计算机器人的位置信息;根据所述机器人的运动量对所述机器人的位置信息进行优化,并将所述机器人优化后的位置信息作为所述机器人的定位结果。
40、可选地,所述控制装置,还用于
41、通过摄像机检测并识别所述识别码的标识信息;
42、根据预先建立的地图中识别码与坐标的对应关系确定所述识别码的位置信息。
43、可选地,所述控制装置,还用于
44、获取所述摄像机与所述识别码的相对位置;
45、根据所述识别码的位置信息与所述相对位置计算所述机器人的位置信息。
46、可选地,所述控制装置,还用于
47、利用扩展卡尔曼滤波器ekf算法对所述运动量与所述机器人的位置信息进行融合,得到所述机器人优化后的位置信息。
48、可选地,所述控制装置,还用于
49、获取所述机器人在上一时刻优化后的位置信息;
50、根据所述上一时刻优化后的位置信息与当前时刻的所述运动量确定所述当前时刻所述机器人的预估位置信息;
51、根据所述预估位置信息更新所述机器人的位置信息,得到所述当前时刻所述机器人优化后的位置信息。
52、可选地,所述运动量包括旋转角度与速度。
53、根据本申请的又一个实施例,还提供了一种存储介质,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行上述任一项方法实施例中的步骤。
54、根据本申请的又一个实施例,还提供了一种电子装置,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行上述任一项方法实施例中的步骤。
55、本发明的目的是通过以下技术方案实现:确定摄像装置检测到的识别码的位置信息;根据所述识别码的位置信息计算机器人的位置信息;根据所述机器人中里程计记录的运动量对所述机器人的位置信息进行优化,并将所述机器人优化后的位置信息作为所述机器人的定位结果,解决了相关技术中机器人定位精度较低的问题。
56、与现有技术相比,本发明具有如下有益效果:通过机器人的运动量优化机器人的位置信息,得到机器人优化后的位置信息,提高了机器人的定位精度。
技术特征:
1.一种机器人定位处理方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,确定摄像装置检测到的识别码的位置信息包括:
3.根据权利要求1所述的方法,其特征在于,根据所述识别码的位置信息计算机器人的位置信息包括:
4.根据权利要求1所述的方法,其特征在于,根据所述机器人中里程计记录的运动量对所述机器人的位置信息进行优化包括:
5.根据权利要求4所述的方法,其特征在于,利用扩展卡尔曼滤波器ekf算法对所述运动量与所述机器人的位置信息进行融合,得到所述机器人优化后的位置信息包括:
6.根据权利要求1至5中任一项所述的方法,其特征在于,所述运动量包括旋转角度与速度。
7.一种机器人定位处理装置,其特征在于,包括:
8.根据权利要求7所述的装置,其特征在于,所述第一确定模块包括:
9.一种机器人,其特征在于,包括:
10.一种计算机可读的存储介质,其特征在于,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行所述权利要求1至6任一项中所述的方法。
技术总结
本申请提供了一种机器人定位处理方法、装置及机器人,上述方法包括:确定摄像装置检测到的识别码的位置信息;根据该识别码的位置信息计算机器人的位置信息;根据机器人中里程计记录的运动量对机器人的位置信息进行优化,并将机器人优化后的位置信息作为机器人的定位结果,解决了相关技术中机器人定位精度较低的问题,通过机器人的运动量优化机器人的位置信息,得到机器人优化后的位置信息,提供了机器人的定位精度。
技术研发人员:王策,李佺,刘艳
受保护的技术使用者:追觅创新科技(苏州)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!