一种3D流速测定探头及测定方法与流程
一种3d流速测定探头及测定方法
技术领域
1.本发明属于气体流速参数测量领域,具体涉及一种3d流速测定探头及测定方法。
背景技术:
2.气流速度(或流量)的测量在许多领域都是非常必要的,有几种流量监测技术已经在许多领域取得了应用,直接方法包括匀速管流量计(典型的如s型皮托管),热式气体质量流量计,超声波气体流量计,以及光学闪烁相关流量计等;间接方法包括用燃料流量推算烟气排放流量,例如天然气锅炉的温室气体排放量计量。
3.但是燃煤电厂、工业窑炉等固定污染源的烟道气流量的测量始终是一个难题,由于烟道直管段不足,烟道内流态通常不稳定,矩形烟道由于更大,流场不规则,内部流态更加难以描述。烟道气中含有腐蚀性气体、粉尘、水汽等,湿法脱硫装置的出口烟气含有粘稠的石膏浆滴,这些会给流量测量仪表带来腐蚀、沾附、堵塞等一系列问题。这会对测量的稳定性和测量装置的日常维护带来影响,如何准确测量烟道气流速是一个挑战。
技术实现要素:
4.本发明的目的在于解决烟道气流速测量准确性的问题,提供一种3d流速测定探头及测定方法,提高流速测量的精度。
5.为了达到上述目的,本发明采用的技术方案如下:
6.一种3d流速测定探头,包括在热电偶的球形探头上设置有的五个测压孔,五个测压孔分别设置有球形探头的端面的中部以及四边上,端面中部的为第一测压孔,四边上的分别为第二测压孔、第三测压孔、第四测压孔和第五测压孔。
7.第二测压孔和第三测压孔的压差用于确定球形探头的偏航角并使偏航归零。
8.第四测压孔和第五测压孔的压差用于确定球形探头的俯仰角。
9.第一测压孔和第二测压孔的压差用于确定球形探头所处位置的气流的轴向速度。
10.一种3d流速测定探头的测定方法,包括以下步骤:
11.s1,根据第二测压孔、第三测压孔的压差,确定探头的偏航角,旋转球形探头,直到偏航角压力计显示零差压读数(p2=p3),读取并记录球形探头的角度。
12.s2,根据第四测压孔和第五测压孔的压差,确定球形探头的俯仰角;
13.s3,把球形探头保持在偏航角为零的位置,获得(p1
–
p2)和(p4
–
p5)的压差读数;
14.s4,根据球形探头的偏航角、俯仰角和速度压头(p1
–
p2)确定气流的轴向速度。
15.气流的轴向速度如下:
[0016][0017]
其中,v
a(i)
为i处的轴向速度,f
2(i)
为i处的速度校准值系数,p1为第一测压孔处测得的压力值,p2为第二测压孔处测得的压力值,t
s(i)
为烟道的绝对温度,
[0018]
θ
y(i)
为偏航角,θ
p(i)
为俯仰角,ps为绝对压力,ms为分子量。
[0019]
速度校准值系数f
2(i)
的计算方法如下:
[0020][0021]
其中,c
p
为皮托管校准系数,δp
std
来自校准皮托管的速度压力。
[0022]
球形探头的测试位置的气流平均轴向速度的计算方法如下:
[0023][0024]
其中,v
a(i)
为i处的轴向速度。
[0025]
与现有技术相比,本发明所具有的有益效果如下:
[0026]
本发明通过在球形探头的端面中部的为第一测压孔,四边上的分别为第二测压孔、第三测压孔、第四测压孔和第五测压孔,通过计算不同测压孔之间的压差,从而确定球形探头的偏航角、俯仰角,根据偏航角、俯仰角和(p1-p2)能够确定气体流速,本发明布设有五个测压孔,能够大幅度减小烟气中的腐蚀性气体、粉尘、水汽等的影响,并且五个测压孔布设在球形探头的不同位置,通过这种3d流速测定,能够把流量测量的精度提高到
±
1-2%。
附图说明
[0027]
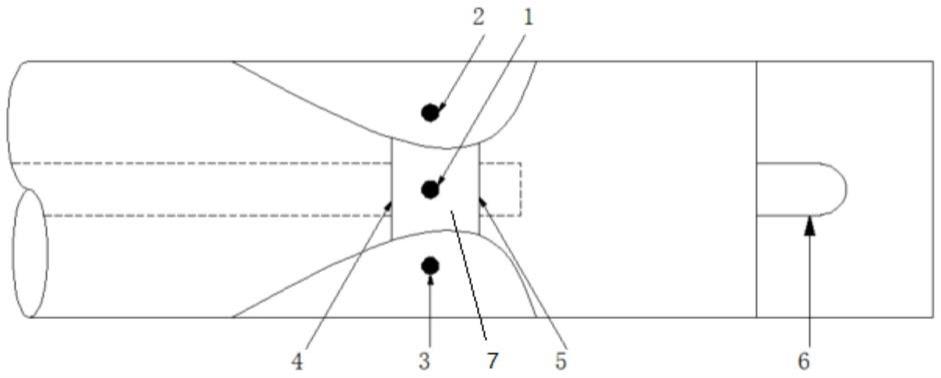
图1为本发明的结构示意图;
[0028]
图2为本发明的俯视图;
[0029]
其中,1、第一测压孔,2、第二测压孔,3、第三测压孔,4、第四测压孔,5、第五测压孔,6、热电偶,7、球形探头。
具体实施方式
[0030]
下面结合附图对本发明做进一步说明。
[0031]
参见图1和图2,一种3d流速测定探头,包括在热电偶6的球形探头7上设置有的五个测压孔,五个测压孔分别设置有球形探头7的端面的中部以及四边上,端面中部的为第一测压孔1,四边上的分别为第二测压孔2、第三测压孔3、第四测压孔4和第五测压孔5。
[0032]
第二测压孔2和第三测压孔3的压差用于使球形探头7偏航归零并确定偏航角。第四测压孔4和第五测压孔5的压差用于确定球形探头7的俯仰角。第一测压孔1和第二测压孔2的压差用于确定球形探头7所处位置的气流的轴向速度。
[0033]
一种3d流速测定探头的测定方法,包括以下步骤:
[0034]
s1,根据第二测压孔、第三测压孔的压差,确定探头的偏航角,旋转球形探头,直到偏航角压力计显示零差压读数(p2=p3),读取并记录球形探头的角度。
[0035]
s2,根据第四测压孔和第五测压孔的压差,确定球形探头的俯仰角;
[0036]
s3,把球形探头保持在偏航角为零的位置,获得(p1
–
p2)和(p4
–
p5)的压差读数;
[0037]
s4,根据球形探头的偏航角、俯仰角和速度压头(p1
–
p2)确定气流的轴向速度。
[0038]
气流的轴向速度如下:
[0039][0040]
其中,v
a(i)
为i处的轴向速度,f
2(i)
为i处的速度校准值系数,p1为第一测压孔处测得的压力值,p2为第二测压孔处测得的压力值,t
s(i)
为烟道的绝对标准温度,θ
y(i)
为偏航角,θ
p(i)
为俯仰角,ps为绝对压力,ms为分子量。速度校准值系数f
2(i)
的计算方法如下:
[0041][0042]
其中,c
p
为皮托管校准系数,δp
std
为来自校准皮托管的速度压力。
[0043]
球形探头7的测试位置的气流平均轴向速度的计算方法如下:
[0044][0045]
其中,v
a(i)
为i处的轴向速度。
技术特征:
1.一种3d流速测定探头,其特征在于,包括在热电偶(6)的球形探头(7)上设置的五个测压孔,五个测压孔分别设置在球形探头(7)的端面的中部以及四边上,端面中部的为第一测压孔(1),四周上的分别为第二测压孔(2)、第三测压孔(3)、第四测压孔(4)和第五测压孔(5)。2.根据权利要求1所述的一种3d流速测定探头,其特征在于,第二测压孔(2)和第三测压孔(3)的压差用于确定球形探头(7)的偏航角并使偏航归零。3.根据权利要求1所述的一种3d流速测定探头,其特征在于,第四测压孔(4)和第五测压孔(5)的压差用于确定球形探头(7)的俯仰角。4.根据权利要求1所述的一种3d流速测定探头,其特征在于,第一测压孔(1)和第二测压孔(2)的压差用于确定球形探头(7)所处位置的气流速度。5.权利要求1所述的一种3d流速测定探头的测定方法,其特征在于,包括以下步骤:s1,根据第二测压孔(2)、第三测压孔(3)的压差,确定球形探头(7)的偏航角,旋转球形探头(7),直到偏航角压力计显示零差压读数(p2=p3),读取并记录球形探头(7)的角度;s2,根据第四测压孔(4)和第五测压孔(5)的压差,确定球形探头(7)的俯仰角;s3,把球形探头(7)保持在偏航角为零的位置,获得(p1
–
p2)和(p4
–
p5)的压差读数;s4,根据球形探头(7)的偏航角、俯仰角和速度压头(p1
–
p2)确定气流的轴向速度。6.根据权利要求5所述的一种3d流速测定探头的测定方法,其特征在于,球形探头(7)所处位置的气流轴向速度如下:其中,v
a(i)
为i处气流的轴向速度,f
2(i)
为i处的速度校准值系数,p1为第一测压孔处测得的压力值,p2为第二测压孔处测得的压力值,t
s(i)
为i处气流的绝对温度,θ
y(i)
为偏航角,θ
p(i)
为俯仰角。7.根据权利要求6所述的一种3d流速测定探头的测定方法,其特征在于,速度校准值系数f
2(i)
的计算方法如下:其中,c
p
为皮托管校准系数,δp
std
为来自校准皮托管的速度压力。8.根据权利要求6所述的一种3d流速测定探头的测定方法,其特征在于,球形探头(7)的测试位置的气流平均轴向速度的计算方法如下:其中,v
a(i)
为i处的轴向速度。
技术总结
本发明公开了一种3D流速测定探头及测定方法,本发明通过在球形探头的端面中部设置为第一测压孔,四周分别设置第二测压孔、第三测压孔、第四测压孔和第五测压孔,通过计算不同测压孔之间的压差,从而确定球形探头的偏航角、俯仰角,根据偏航角、俯仰角和速度压头(P1-P2)能够确定气流速度,本发明布设有五个测压孔,能够大幅度减小气流中的腐蚀性气体、粉尘、水汽等的影响,并且五个测压孔布设在球形探头的不同位置,通过这种3D流速测定,能够把流速的测量精度提高到
技术研发人员:谭增强 牛拥军 李元昊 刘玺璞 蒙毅 牛国平
受保护的技术使用者:华能集团技术创新中心有限公司
技术研发日:2021.11.18
技术公布日:2022/2/18
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1