一种车辆定位和车厢检测装置的制作方法
1.本实用新型涉及车辆数据采集装置。
背景技术:
2.车辆的车厢在装载之前需要进行数据分析,判断车厢位置,车厢容积,从而准确的装填合适物料,并且保证装填设备能够对准车厢,准确装货。
3.目前的车厢扫描大都采用3d扫描检测方式,3d扫描检测方式是通过3d视觉系统通过扫描的方式获取信息,将信息进行系统数据处理得出相应的数据,建立三维坐标系。系统检测耗时长,成本高,系统逻辑算法复杂,维护成本高,专业要求高。
技术实现要素:
4.本实用新型所要解决的技术问题是实现一种操作简单,测量准确,运维成本低的车厢检查装置。
5.为了实现上述目的,本实用新型采用的技术方案为:一种车辆定位和车厢检测装置,装置设有吊架,所述吊架上方固接有悬吊固定部,并通过悬吊固定部连接升降机构,所述吊架的下方设有扫描框,所述扫描框的前端和后端各固定有一个激光测距传感器分别采集左侧间距和右侧间距,所述扫描框的两侧各固定有一个激光测距传感器分别采集前方间距和后方间距,所述扫描框上固定有一个向下采集下方间距的激光测距传感器,五个所述激光测距传感器连接上位机并将所采集的信号输送至上位机。
6.所述吊架下表面设有左右方向延伸水平设置的y向滑轨,所述y向滑轨下方固定有y向滑块,所述吊架上固定有驱动y向滑块沿y向滑轨位移的y向驱动机构,所述y向滑块下表面前后方向延伸水平设置的x向滑块,所述扫描框通过滑块固定在x向滑轨下方。
7.所述上位机连接升降机构,x向驱动机构和y向驱动机构,并输出控制信号至升降机构,x向驱动机构和y向驱动机构。
8.车辆定位和车厢检测装置安装在车辆停车区域的上方。
9.本实用新型基于激光定点二维测距的方式,通过机器人走位扫描,通过各扫描点的数据进行系统运算,得出车辆车尾在标定的系统坐标x值和y值、车厢长度、宽度、栏板高度、车头高度和车辆在系统中的偏移角度等关键参数。
10.装置整体成本低,可维护性高,工作效率高,检测方法简单可靠,可塑性高,可视化数据,方便维护,能够定点扫描,多次取数据,提高的检测的精度,保证了数据的稳定性。
附图说明
11.下面对本实用新型说明书中每幅附图表达的内容及图中的标记作简要说明:
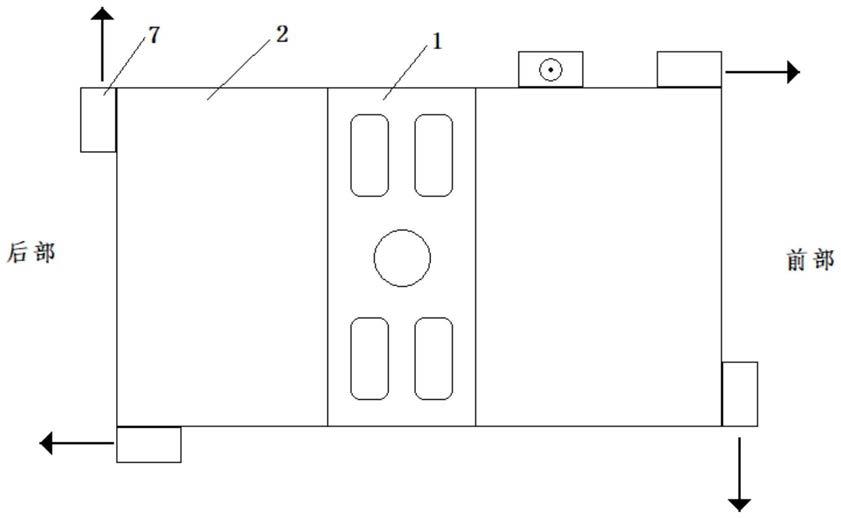
12.图1为车辆定位和车厢检测装置俯视图;
13.图2为车辆定位和车厢检测装置侧视图;
14.图1中箭头为激光测距传感器探测方向;
15.上述图中的标记均为:1、悬吊固定部;2、吊架;3、y向滑块;4、y向滑轨;5、x向滑轨;6、扫描框;7、激光测距传感器。
具体实施方式
16.下面对照附图,通过对实施例的描述,本实用新型的具体实施方式如所涉及的各构件的形状、构造、各部分之间的相互位置及连接关系、各部分的作用及工作原理、制造工艺及操作使用方法等,作进一步详细的说明,以帮助本领域技术人员对本实用新型的发明构思、技术方案有更完整、准确和深入的理解。
17.车辆定位和车厢检测装置如图1、2所示,整个装置设有一个吊架2,吊架2用于上方设有悬吊固定部1,下方设有扫描框6,吊架2通过悬吊固定部1连接升降机构,升降机构可以实现吊架2的竖直方向的位移,扫描框6,为四方形框架,用于固定五个激光测距传感器7,扫描框6的前端和后端各固定有一个激光测距传感器7分别采集左侧间距和右侧间距,扫描框6的两侧各固定有一个激光测距传感器7分别采集前方间距和后方间距,扫描框6上固定有一个向下采集下方间距的激光测距传感器7,如图1所示,扫描框6前端激光测距传感器7位于右侧位置,用于扫描右侧距离信息,扫描框6后端激光测距传感器7位于左侧位置,用于扫描左侧距离信息,扫描框6左侧的激光测距传感器7位于前端位置,用于扫描前端距离信息,扫描框6右侧的激光测距传感器7位于后端位置,用于扫描后端距离信息,采集下方间距的激光测距传感器7位于扫描框6左侧。五个激光距离传感器中,向下扫描的激光距离传感器扫描中心线为竖直轴线,前后扫描的激光距离传感器扫描中心线与左右扫描的激光距离传感器扫描中心线相互垂直。
18.为了测量车厢是否歪斜,扫描框6需要能够平移,因此吊架2下表面设有左右方向延伸水平设置的y向滑轨3,y向滑轨3下方固定有y向滑块2,吊架2上固定有驱动y向滑块2沿y向滑轨3位移的y向驱动机构,y向滑块2下表面前后方向延伸水平设置的x向滑块,扫描框6通过滑块固定在x向滑轨4下方,构成了一个可以x向和y向平移的结构,上位机连接升降机构,x向驱动机构和y向驱动机构,并输出控制信号至升降机构,x向驱动机构和y向驱动机构。从而能够控制扫描框6前后左右位移,以及上下位移,升降机构,x向驱动机构和y向驱动机构可以采用气缸驱动结构、液压缸驱动结构、电动缸驱动结构,采用这样的硬连接结构,保证位移时扫描框6尽量不晃动。
19.车辆定位和车厢检测装置安装在车辆停车区域的上方,五个激光测距传感器7也连接上位机,扫描过程中,五个激光测距传感器7将所采集的信号输送至上位机,有上位机记录并计算车厢的参数信息。
20.工作原理:
21.首先升降机构驱动装置由1#点垂直向下运动,当车头传感器检测到数据后,判断为跟踪到车头,得出车头高度,同时得出车厢上水箱数据。装置继续向下动作,当车宽得到数据后,计算出车厢栏板的高度。
22.当车尾、车宽传感器数据满足条件后立即停止,获取2#点的车长、车宽;装置由2#点沿y轴平移至3#点,计算出垂直中心是否有水箱和水箱的厚度,同时得出3#点的车长、车宽;装置由3#点沿x轴平移至4#点,得出4#点车长、车宽,车厢侧板在系统中的y值;
23.装置扫描完成后,将扫描的数据进行综合运算,得出最终的车厢长度、宽度、车厢x
值、车厢y值、车厢高度值等关键参数。
24.上面结合附图对本发明进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本实用新型的保护范围之内。
技术特征:
1.一种车辆定位和车厢检测装置,其特征在于,装置设有吊架,所述吊架上方固接有悬吊固定部,并通过悬吊固定部连接升降机构,所述吊架的下方设有扫描框,所述扫描框的前端和后端各固定有一个激光测距传感器分别采集左侧间距和右侧间距,所述扫描框的两侧各固定有一个激光测距传感器分别采集前方间距和后方间距,所述扫描框上固定有一个向下采集下方间距的激光测距传感器,五个所述激光测距传感器连接上位机并将所采集的信号输送至上位机。2.根据权利要求1所述的车辆定位和车厢检测装置,其特征在于:所述吊架下表面设有左右方向延伸水平设置的y向滑轨,所述y向滑轨下方固定有y向滑块,所述吊架上固定有驱动y向滑块沿y向滑轨位移的y向驱动机构,所述y向滑块下表面前后方向延伸水平设置的x向滑块,所述扫描框通过滑块固定在x向滑轨下方。3.根据权利要求2所述的车辆定位和车厢检测装置,其特征在于:所述上位机连接升降机构,x向驱动机构和y向驱动机构,并输出控制信号至升降机构,x向驱动机构和y向驱动机构。4.根据权利要求1、2或3所述的车辆定位和车厢检测装置,其特征在于:车辆定位和车厢检测装置安装在车辆停车区域的上方。
技术总结
本实用新型揭示了一种车辆定位和车厢检测装置,装置设有吊架,所述吊架上方固接有悬吊固定部,并通过悬吊固定部连接升降机构,所述吊架的下方设有扫描框,所述扫描框的前端和后端各固定有一个激光测距传感器分别采集左侧间距和右侧间距,所述扫描框的两侧各固定有一个激光测距传感器分别采集前方间距和后方间距,所述扫描框上固定有一个向下采集下方间距的激光测距传感器,五个所述激光测距传感器连接上位机并将所采集的信号输送至上位机。装置整体成本低,可维护性高,工作效率高,检测方法简单可靠,可塑性高,可视化数据,方便维护,能够定点扫描,多次取数据,提高的检测的精度,保证了数据的稳定性。保证了数据的稳定性。保证了数据的稳定性。
技术研发人员:易建伟 单体飞 胡龙开 康顺生 麻斯雄
受保护的技术使用者:安徽海螺中南智能机器人有限责任公司
技术研发日:2021.04.02
技术公布日:2021/11/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1