一种绝缘子耐压试验自动化装置的制作方法
1.本实用新型属于绝缘子测试技术领域,具体涉及一种绝缘子耐压试验自动化装置。
背景技术:
2.在电力行业施工的绝缘子试验部分,绝缘子的耐压试验扮演着重要的角色,绝缘子是一种特殊的绝缘控件, 能够在架空输电线路中起到重要作用。早年间绝缘子多用于电线杆,慢慢发展于高型高压电线连接塔的一端挂了很多盘状的绝缘体,它是为了增加爬电距离的,通常由玻璃或陶瓷制成,就叫绝缘子。绝缘子不应该由于环境和电负荷条件发生变化导致的各种机电应力而失效,否则绝缘子就不会产生重大的作用,就会损害整条线路的使用和运行寿命。
3.绝缘耐压试验标准,在各个国家都有具体规定。中国国家标准(gb311.1
‑
83)规定了3~500kv输变电设备的基准绝缘水平;3~500kv输变电设备雷电冲击耐受电压,一分钟工频耐受电压;以及330~500kv输变电设备操作冲击耐受电压。电工设备制造部门和电力系统运行部门在选择耐压试验的项目和试验电压值时,都应符合国家标准的规定。现有的技术方案是采用人工搬运绝缘子,自动化程度低,采用人工搬运费时费力,并且工人在搬运绝缘子的过程中可能会损坏绝缘子。
技术实现要素:
4.本实用新型的目的是提供一种绝缘子耐压试验自动化装置,提高绝缘子耐压试验的效率。
5.本实用新型解决其技术问题的技术方案为:一种绝缘子耐压试验自动化装置,包括底座、竖向动作器、支架、小臂动作器、抓取动作器、plc,所述竖向动作器的一端与底座固定连接,所述竖向动作器的另一端与支架固定连接,所述小臂动作器固定设置在支架上,所述抓取动作器与小臂动作器的臂端固定连接,所述小臂动作器用于带动抓取动作器在竖直方向上移动,所述plc用于控制竖向动作器、小臂动作器、抓取动作器的动作。
6.还包括距离传感器,所述距离传感器设置在抓取动作器上,所述距离传感器用于检测抓取动作器是否触碰到绝缘子,所述距离传感器的信号输出端与plc的信号输入端连接。
7.所述支架为横向动作器。
8.还包括万向轮,所述万向轮设置在底座下方。
9.所述小臂动作器、抓取动作器为多组,所述小臂动作器的数量等于抓取动作器的数量。
10.本实用新型的有益效果为:通过设置竖向动作器、支架、小臂动作器、抓取动作器并通过plc控制,省去了人员在对绝缘子进行测试时的拿放操作,提高了试验速度,省时省力,提高了测试的容错率,自动化程度高。
附图说明
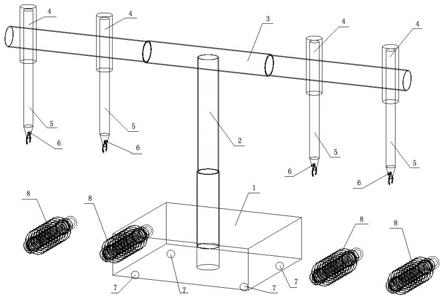
11.图1是本实用新型的结构示意图。
12.图2是本实用新型的电路原理框图。
具体实施方式
13.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
14.如图1所示,本实用新型包括底座1、竖向动作器2、支架、小臂动作器4、抓取动作器5、plc,所述竖向动作器2的一端与底座1固定连接,所述竖向动作器2的另一端与支架固定连接,所述小臂动作器4固定设置在支架上,所述抓取动作器5与小臂动作器4的臂端固定连接,所述小臂动作器4用于带动抓取动作器5在竖直方向上移动,所述plc用于控制竖向动作器2、小臂动作器4、抓取动作器5的动作。
15.还包括距离传感器6,所述距离传感器6设置在抓取动作器5上,所述距离传感器6用于检测抓取动作器5是否触碰到绝缘子,所述距离传感器6的信号输出端与plc的信号输入端连接。
16.所述支架为横向动作器3。
17.还包括万向轮7,所述万向轮7设置在底座1下方。
18.所述小臂动作器4、抓取动作器5为多组,所述小臂动作器4的数量等于抓取动作器5的数量。
19.本实用新型在使用时,先将待测的绝缘子放置在预先设定好的位置(抓取动作器5能够抓到的下方),plc控制竖向动作器2下降,带动横向动作器3下降,横向动作器3上的小臂动作器4下降,带动抓取动作器5下降至与待测绝缘子8接触,接触后,距离传感器6向plc发送信号,plc控制抓取动作器5夹紧待测绝缘子8,随后,小臂动作器4与竖向动作器2上升回到原位,将待测绝缘子8抓起。抓起后的绝缘子在后续的耐压试验中无需固定以及移动,采用对应的测试设备在该自动化装置上进行试验,可一次对多组进行试验。
20.本实用新型通过设置竖向动作器、支架、小臂动作器、抓取动作器并通过plc控制,省去了人员在对绝缘子进行测试时的拿放操作,提高了试验速度,省时省力,提高了测试的容错率,自动化程度高。
技术特征:
1.一种绝缘子耐压试验自动化装置,其特征在于:包括底座、竖向动作器、支架、小臂动作器、抓取动作器、plc,所述竖向动作器的一端与底座固定连接,所述竖向动作器的另一端与支架固定连接,所述小臂动作器固定设置在支架上,所述抓取动作器与小臂动作器的臂端固定连接,所述小臂动作器用于带动抓取动作器在竖直方向上移动,所述plc用于控制竖向动作器、小臂动作器、抓取动作器的动作。2.根据权利要求1所述的一种绝缘子耐压试验自动化装置,其特征在于:还包括距离传感器,所述距离传感器设置在抓取动作器上,所述距离传感器用于检测抓取动作器是否触碰到绝缘子,所述距离传感器的信号输出端与plc的信号输入端连接。3.根据权利要求1所述的一种绝缘子耐压试验自动化装置,其特征在于:所述支架为横向动作器。4.根据权利要求1所述的一种绝缘子耐压试验自动化装置,其特征在于:还包括万向轮,所述万向轮设置在底座下方。5.根据权利要求1所述的一种绝缘子耐压试验自动化装置,其特征在于:所述小臂动作器、抓取动作器为多组,所述小臂动作器的数量等于抓取动作器的数量。
技术总结
本实用新型的目的是提供一种绝缘子耐压试验自动化装置,提高绝缘子耐压试验的效率,包括底座、竖向动作器、支架、小臂动作器、抓取动作器、PLC,所述竖向动作器的一端与底座固定连接,所述竖向动作器的另一端与支架固定连接,所述小臂动作器固定设置在支架上,所述抓取动作器与小臂动作器的臂端固定连接,所述小臂动作器用于带动抓取动作器在竖直方向上移动,所述PLC用于控制竖向动作器、小臂动作器、抓取动作器的动作,通过设置竖向动作器、支架、小臂动作器、抓取动作器并通过PLC控制,省去了人员在对绝缘子进行测试时的拿放操作,提高了试验速度,省时省力,提高了测试的容错率,自动化程度高。化程度高。化程度高。
技术研发人员:时运瑞 陈东升 陈瑞峰 吕小浩 詹晖 晋毅 王青 李迪 常小亮 杨斌 张勇超
受保护的技术使用者:河南送变电建设有限公司
技术研发日:2021.05.26
技术公布日:2021/11/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1