一种基于路面实景反馈的车载AR导航系统的制作方法
一种基于路面实景反馈的车载ar导航系统
技术领域
1.本实用新型涉及汽车电子领域,特别涉及一种基于路面实景反馈的车载ar导航系统。
背景技术:
2.随着车载导航系统的逐步发展,人们对于ar导航有了强烈的需求。ar导航能够在实时路况图片上叠加具体的指示标记,给驾驶者更加具体可见的导引,能够解决普通导航在复杂路况下易出错的问题。车载ar导航系统是车载导航技术与ar技术结合的产物。其核心功能是在实时路况图片上叠加具体的指示标记,给驾驶者更加具体可见的导引,解决普通导航在复杂路况下易出错的问题,提高驾驶、导航体验。
3.目前市场上车载ar导航处于起步阶段,产品较少且不成熟。现有的ar导航方案,或者结构不合理或者参数不够详细等,导致具体实现有诸多困难,难以满足车厂快速实现车载ar导航的要求。
技术实现要素:
4.本实用新型的目的是克服现有技术缺陷,提供一种基于路面实景反馈的车载ar导航系统,实现了良好的ar导航效果,导引图标符合导航信息;获取了稳定、流畅的ar导航画面。
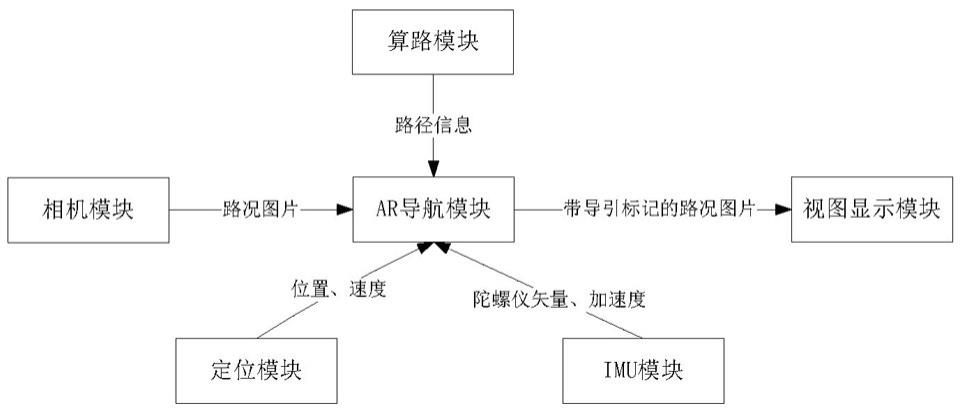
5.本实用新型的目的是这样实现的:一种基于路面实景反馈的车载ar导航系统,包括ar导航模块,相机模块,算路模块,定位模块、imu模块和视图显示模块;
6.所述ar导航模块用于接收各模块提供的数据和图片,根据接收的数据和原始图片,合成叠加有导引标记的路况图片,向视图显示模块提供要显示的图片;
7.所述相机模块用于拍摄实时路况图片,通过相机持续拍摄路况图片,存储在图片池中,供ar导航模块需要时调用;
8.所述算路模块用于采集起始点到终点的路径,获取路径信息,供ar导航模块导航时使用;
9.所述定位模块用于通过天线获取车辆的实时定位信息并提供给ar导航模块;
10.所述imu模块用于通过传感器获取实时车辆传感器信息并传给ar导航模块;
11.所述视图显示模块用于显示ar导航模块处理后的叠加有导引图标的路况图片,为驾驶者提供实时导航。
12.本实用新型工作时,首先用户选择起始点和目的地,使用算路模块进行算路;选择某条路线后,启动相机模块,启动ar导航;导航过程中,相机持续拍摄实时路况图片放于图片池里,ar导航模块按需从图片池里调用图片;同时,导航过程中,定位模块和imu模块提供实时数据,供ar导航模块调用;ar导航模块根据当前的导航信息以及路况信息,合成带有导引标记的路况图片;最后视图显示模块实时显示路况图片。
13.本实用新型采用以上技术方案,与现有技术相比有益效果为:通过相机模块获取
实时路况图片,相机模块与ar导航模块间通过图片队列的方式进行数据通信,通过图片池对图片进行管理,并将图片传入ar模块进行处理,ar导航模块根据当前的导航信息以及路况信息合理配置指引路标的资源,搭建一个完整的ar导航系统,各模块间的参数具有明确的规定并相互关联,该系统能够获得良好的ar导航效果,导引图标符合导航信息;使ar导航画面更加稳定、流畅。
14.作为本实用新型的进一步限定,所述路径信息包括起点信息、终点信息和沿途信息。
15.作为本实用新型的进一步限定,所述车辆的实时定位信息包括车辆的实时位置和速度。
16.作为本实用新型的进一步限定,所述车辆传感器信息包括车辆的陀螺仪数据和加速度。
17.为了保证最终的实景引导图片的连贯性,所述相机模块拍摄图片的频率大于或等于ar导航模块处理图片的频率。
18.为了保证用户看到引导图片是在正确的位置,防止出现转弯时引导图片还显示直行之类的不匹配的问题,所述定位模块提供定位数据的频率大于或等于ar导航模块处理图片的频率。
附图说明
19.图1为本实用新型系统结构图 。
20.图2为本实用新型中实景路况图片的管理方式流程图。
具体实施方式
21.如图1所示的一种基于路面实景反馈的车载ar导航系统,包括ar导航模块,相机模块,算路模块,定位模块、imu模块和视图显示模块。
22.ar导航模块用于接收各模块提供的数据和图片,根据接收的数据和原始图片,合成叠加有导引标记的路况图片,向视图显示模块提供要显示的图片;ar导航模块的部分规定为:ar导航处理图片的频率为a赫兹,a的值需要大于或等于20,即ar导航模块需要在1秒内处理至少20张路况图片;ar导航模块合成带有导引标记的图片时,其中的标记是一定格式的图片资源,预先存储于车机内存中,启动模块时加载到运行内存中,并按需获取。
23.相机模块用于拍摄实时路况图片,通过相机持续拍摄路况图片,存储在图片池中,供ar导航模块需要时调用;为了保证最终的实景引导图片的连贯性,相机模块拍摄图片的频率大于或等于ar导航模块处理图片的频率。
24.算路模块用于采集起始点到终点的路径,获取路径信息,路径信息包括起点信息、终点信息和沿途信息,供ar导航模块导航时使用;
25.定位模块用于通过天线获取车辆的实时定位信息,包括车辆的实时位置和速度,并提供给ar导航模块;为了保证用户看到引导图片是在正确的位置,防止出现转弯时引导图片还显示直行之类的不匹配的问题,定位模块提供定位数据的频率大于或等于ar导航模块处理图片的频率,即定位模块提供数据的频率为c,其数值必须大于等于a(ar导航处理图片的频率值)。
26.imu模块用于通过传感器获取实时车辆传感器信息,包括车辆的陀螺仪数据和加速度,并传输给ar导航模块。
27.视图显示模块用于显示ar导航模块处理后的叠加有导引图标的路况图片,为驾驶者提供实时导航。
28.本实用新型工作时,首先用户选择起始点和目的地,使用算路模块进行算路;选择某条路线后,启动相机模块,启动ar导航模块;导航过程中,相机持续拍摄实时路况图片放于图片池里,ar导航模块按需从图片池里调用图片;同时,导航过程中,定位模块和imu模块会提供实时数据,供ar导航模块调用。ar导航模块根据当前的导航信息以及路况信息,合成带有导引标记的路况图片;最后视图显示模块实时显示路况图片。
29.如图2所示,相机参数或配置为:支持yuv图片格式;预览模式下的帧率为bfps(帧每秒),b的值必须大于等于a(ar导航处理图片的频率值);图片池存储图片的数量为1或2,具体选1或2根据相机帧率和ar模块处理图片的帧率稳定度来判断,一个简单的判断为,如果在绝大多数情况下,相机都能在ar模块处理图片前拍摄到图片,则图片池容量设为1即可,否则设为2;相机拍摄模式为预览模式。
30.本实用新型并不局限于上述实施例,在本实用新型公开的技术方案的基础上,本领域的技术人员根据所公开的技术内容,不需要创造性的劳动就可以对其中的一些技术特征作出一些替换和变形,这些替换和变形均在本实用新型的保护范围内。
技术特征:
1.一种基于路面实景反馈的车载ar导航系统,其特征在于,包括ar导航模块,相机模块,算路模块,定位模块、imu模块和视图显示模块;所述ar导航模块用于接收各模块提供的数据和图片,根据接收的数据和原始图片,合成叠加有导引标记的路况图片,向视图显示模块提供要显示的图片;所述相机模块用于拍摄实时路况图片,通过相机持续拍摄路况图片,存储在图片池中,供ar导航模块需要时调用;所述算路模块用于采集起始点到终点的路径,获取路径信息,供ar导航模块导航时使用;所述定位模块用于通过天线获取车辆的实时定位信息并提供给ar导航模块;所述imu模块用于通过传感器获取实时车辆传感器信息并传给ar导航模块;所述视图显示模块用于显示ar导航模块处理后的叠加有导引图标的路况图片,为驾驶者提供实时导航。2.根据权利要求1所述的一种基于路面实景反馈的车载ar导航系统,其特征在于,所述路径信息包括起点信息、终点信息和沿途信息。3.根据权利要求1所述的一种基于路面实景反馈的车载ar导航系统,其特征在于,所述车辆的实时定位信息包括车辆的实时位置和速度。4.根据权利要求1所述的一种基于路面实景反馈的车载ar导航系统,其特征在于,所述车辆传感器信息包括车辆的陀螺仪数据和加速度。5.根据权利要求1所述的一种基于路面实景反馈的车载ar导航系统,其特征在于,所述相机模块拍摄图片的频率大于或等于ar导航模块处理图片的频率。6.根据权利要求1所述的一种基于路面实景反馈的车载ar导航系统,其特征在于,所述定位模块提供定位数据的频率大于或等于ar导航模块处理图片的频率。
技术总结
本实用新型公开了一种基于路面实景反馈的车载AR导航系统,包括AR导航模块,相机模块,算路模块,定位模块、IMU模块和视图显示模块;AR导航模块用于实况图片的处理、实时导航播报;相机模块用于拍摄实时路况图片并提供给AR导航模块处理;算路模块用于采集起始点到终点的路径,获取路径信息,供AR导航模块导航时使用;定位模块用于通过天线获取车辆的实时定位信息并提供给AR导航模块;IMU模块用于通过传感器获取实时车辆传感器信息并传给AR导航模块;视图显示模块用于显示AR导航模块处理后的叠加有导引图标的路况图片,为驾驶者提供实时导航。本实用新型实现了良好的AR导航效果,导引图标符合导航信息;获取了稳定、流畅的AR导航画面。航画面。航画面。
技术研发人员:章亮
受保护的技术使用者:扬州航盛科技有限公司
技术研发日:2021.06.25
技术公布日:2021/12/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1